







文章目录
一、实验简介及原理
二、实验设备
三、实验主要代码
四、最终结果
一、实验简介及原理
本次实验需要通过STM32与HC_SR04模块实现实时测距,并将测距信息通过串口显示在电脑上
原理
超声波测距原理是在超声波发射装置发出超声波,它的根据是接收器接到超声波时的时间差,与雷达测距原理相似。 超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。
超声波在空气中的传播速度为340m/s,根据计时器记录的时间t(秒),就可以计算出发射点距障碍物的距离(s),即:s=340t/2
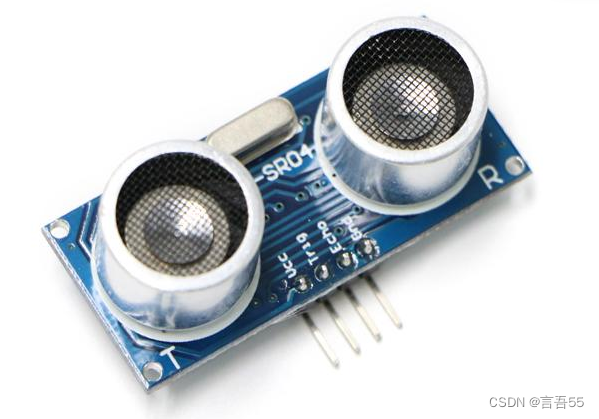
HC-SR04模块
采用IO口TRIG触发测距,给至少10us的高电平信号,模块自动发送8个40khz的方波,自动检测是否有信号返回。
有信号返回,通过IO口ECHO输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间。测试距离=(高电平时间*声速(340M/S))/2。
二、实验设备
硬件:STM32F103C8T6、HC_SR04超声波测距模块
软件:CubeMX、Keil5、FlyMCU、野火串口调试助手
三、实验主要代码
(完整源码在代码块后)
uint32_t csb_get_distance( 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 4864
4864











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









