






仿真图:
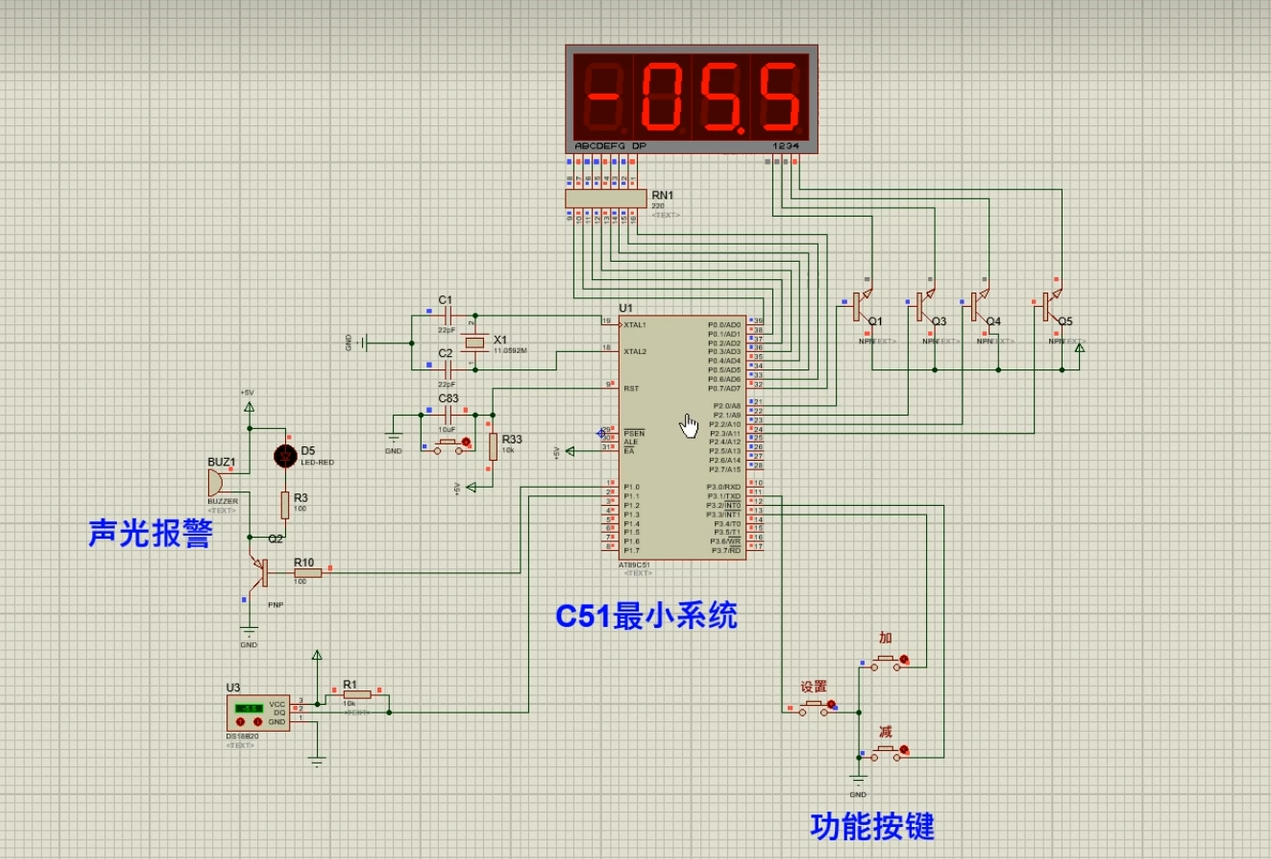
功能简介:
单片机采用AT89C51,最小系统由晶振和复位电路组成
显示部分采用4位数码管用于显示该项目的参数信息
三个功能按键,分别是设置、加、减等功能,可以设置高位和低位阈值,支持低位负数阈值设置
采用DS18B20作为温度传感器,支持负数温度值显示
具有LED和蜂鸣器组成的声光报警电路,当温度值超过阈值时触发报警
芯片/模块的特点:
DS18B20特点:
- 单总线接口:DS18B20使用单总线接口进行通信,只需要一个引脚就可以连接多个传感器,简化了电路设计和连接。
- 数字输出:DS18B20以数字形式输出温度值,不需要额外的模数转换器。它使用12位的分辨率来表示温度值,可以实现高精度的温度测量。
- 高精度:DS18B20可以提供从-55°C到+125°C的温度测量范围,并具有±0.5°C的温度精度。因此,在许多应用中,它可以提供可靠和准确的温度测量结果。
- 多功能性:除了测量温度,DS18B20还可以执行其他功能,如温度报警功能。它可以设置上下限温度阈值,并在温度超过或低于这些阈值时触发报警。
- 低功耗:DS18B20采用低功耗设计,工作电流极低,只需要很少的能量来进行温度测量和通信。
- 耐用性:DS18B20具有良好的耐用性和可靠性,其封装材料和结构设计使其适用于各种环境条件下的应用。
主程序:
#include "reg52.h"
//---重定义关键词---//
#define uchar unsigned char
#define uint unsigned int
//--定义使用的IO口--//
sbit DQ =P1^1;
sbit BEEP=P3^7; //定义蜂鸣器
sbit ALAM=P1^0; //定义灯光报警
sbit SET=P3^1; //定义调整键
sbit ADD=P3^3;
sbit DEC=P3^2;
bit shanshuo_st; //闪烁间隔标志
bit beep_st; //蜂鸣器间隔标志
char shangxian=38; //上限报警温度,默认值为38
char xiaxian=-6; //下限报警温度,默认值为-6
uchar set_st=0; //状态标志
uchar m; //温度值全局变量(整数)
char Signed_Current_temp;
uchar n; //温度值全局变量(小数)
char num=0;
uchar DisplayData[8];
uchar code DSY_CODE[]={0xC0,0xF9,0xA4,0xB0,0x99,0x92,0x82,0xF8,0x80,0x90};
uchar data DSY_IDX[]={0x01,0x02,0x04,0x08,0x10,0x20,0x40,0x80};
uchar code df_table[]={0,1,1,2,3,3,4,4,5,6,6,7,8,8,9,9};
void Alarm();
/*******************************************************************************
* 函 数 名 : delay
* 函数功能 : 延时函数,i=1时,大约延时10us
*******************************************************************************/
void delay(uint i)
{
while(i--);
}
void Delay1ms(uint y)
{
uint x;
for( ; y>0; y--)
{
for(x=110; x>0; x--);
}
}
void datapros(void)
{
DisplayData[1] = DSY_CODE[m/10];
DisplayData[2] = DSY_CODE[m%10]&0x7F;
DisplayData[3] = DSY_CODE[n];
}
//=====================================================================================
//=====================================================================================
//=====================================================================================
/*****延时子程序*****/
void Delay_DS18B20(int num)
{
while(num--) ;
}
/*****初始化DS18B20*****/
void Init_DS18B20(void)
{
unsigned char x=0;
DQ = 1; //DQ复位
Delay_DS18B20(28); //稍做延时
DQ = 0; //单片机将DQ拉低
Delay_DS18B20(80); //精确延时,大于480us
DQ = 1; //拉高总线
Delay_DS18B20(14);
x = DQ; //稍做延时后,如果x=0则初始化成功,x=1则初始化失败
Delay_DS18B20(20);
}
/*****读一个字节*****/
unsigned char ReadOneChar(void)
{
unsigned char i=0;
unsigned char dat = 0;
for (i=8;i>0;i--)
{
DQ = 0; // 给脉冲信号
dat>>=1;
DQ = 1; // 给脉冲信号
if(DQ)
dat|=0x80;
Delay_DS18B20(4);
}
return(dat);
}
/*****写一个字节*****/
void WriteOneChar(unsigned char dat)
{
unsigned char i=0;
for (i=8; i>0; i--)
{
DQ = 0;
DQ = dat&0x01;
Delay_DS18B20(5);
DQ = 1;
dat>>=1;
}
}
/*****读取温度*****/
void ReadTemperature(void)
{
unsigned char a=0;
unsigned char b=0;
//unsigned int t=0;
uchar ng=0;
//float tt=0;
Init_DS18B20();
WriteOneChar(0xCC); //跳过读序号列号的操作
WriteOneChar(0x44); //启动温度转换
Delay1ms(15);
Init_DS18B20();
WriteOneChar(0xCC); //跳过读序号列号的操作
WriteOneChar(0xBE); //读取温度寄存器
a=ReadOneChar(); //读低8位
b=ReadOneChar(); //读高8位
if((b&0XF8)==0XF8)
{
b=~b;
a=~a+1;
if(a==0X00)b++;
ng=1; //为负数
}
n=df_table[a&0X0F];
if(ng==1)
{
DisplayData[0] = 0xbf;
}
else
{
DisplayData[0] = 0xff;
}
m=((a&0Xf0)>>4)|((b&0X07)<<4);
Signed_Current_temp=ng?-m:m;
//t=b; //高8位转移到t
// t<<=8; //t数据左移8位
// t=t|a; //将t和a按位或,得到一个16位的数
//tt=t*0.0625; //将t乘以0.0625得到实际温度值(温度传感器设置12位精度,最小分辨率是0.0625)
// t= tt*10+0.5; //放大10倍(将小数点后一位显示出来)输出并四舍五入
//return(t); //返回温度值
}
/*****读取温度*****/
void check_wendu(void)
{
//uint a,b,c,i;
uint i;
for( i=2;i>0;i--){ //重复3次
ReadTemperature(); //获取温度值
//a=c/100; //计算得到十位数字
//b=c/10-a*10; //计算得到个位数字
// m=c/10; //计算得到整数位
// n=c-a*100-b*10; //计算得到小数位
// if(m<0){m=0;n=0;} //设置温度显示上限
if(m>99){m=99;n=9;} //设置温度显示上限
}
}
/*******************************************************************************
* 函数名 :DigDisplay()
* 函数功能 :数码管显示函数
* 输入 : 无
* 输出 : 无
*******************************************************************************/
void DigDisplay()
{
uint i;
P0=0xff;
P2=0x00;
for(i=30;i>0;i--){
P2=DSY_IDX[0];
P0=DisplayData[0];//发送数据
delay(150); //间隔一段时间扫描
P0=0xff;//消隐
P2=DSY_IDX[1];
P0=DisplayData[1];//发送数据
delay(150); //间隔一段时间扫描
P0=0xff;//消隐
P2=DSY_IDX[2];
P0=DisplayData[2];//发送数据
delay(150); //间隔一段时间扫描
P0=0xff;//消隐
P2=DSY_IDX[3];
P0=DisplayData[3];//发送数据
delay(250); //间隔一段时间扫描
P0=0xff;//消隐
Alarm(); //报警检测
}
}
/*****报警子程序*****/
void Alarm()
{
float tem,xiaoshu;
tem=Signed_Current_temp;
xiaoshu=n;
xiaoshu=xiaoshu*0.1;
if(((tem+xiaoshu)>=shangxian)||((tem-xiaoshu)<xiaxian))
{
BEEP=!BEEP;
ALAM=0;
}
else
{
BEEP=1;
ALAM=1;
}
}
/*****显示报警温度子程序*****/
void Disp_alarm(char baojing)
{
uint i;
P0=0xff;
P2=0x00;
for(i=2;i>0;i--){
P2=DSY_IDX[0];
if(set_st==1)P0=0x89; //上限H
else if(set_st==2)P0=0xC7; //下限L标示
delay(100);
P0=0xff;//消隐
P2=DSY_IDX[1];
if(baojing<0)
{
P0 = 0xbf;
baojing=-baojing;
}
else
{
P0 = 0xff;
}
delay(100);
P0=0xff;//消隐
P2=DSY_IDX[2];
P0=DSY_CODE[baojing/10];
delay(100);
P0=0xff;//消隐
P2=DSY_IDX[3];
P0=DSY_CODE[baojing%10];
delay(200);
P0=0xff;//消隐
}
}
/*******************************************************************************
* 函 数 名 : main
* 函数功能 : 主函数
* 输 入 : 无
* 输 出 : 无
*******************************************************************************/
void main()
{
EA=1;
IT0=1; //外部中断的触发方式,下降沿触发
IT1=1;
check_wendu();
Delay1ms(900);
check_wendu();
datapros();
BEEP=1;
ALAM=1;
while(1)
{
if(SET==0)
{
delay(2000);
do{}while(SET==0);
set_st++;shanshuo_st=1;
if(set_st>2)set_st=0;
}
if(set_st==0)
{
BEEP=1;
EX0=0; //关闭外部中断0
EX1=0; //关闭外部中断1
check_wendu();
datapros();
DigDisplay();
//Alarm(); //报警检测
}
else if(set_st==1)
{
BEEP=1; //关闭蜂鸣器
ALAM=1;
EX0=1; //开启外部中断0
EX1=1; //开启外部中断1
if(shanshuo_st) {Disp_alarm(shangxian);}
}
else if(set_st==2)
{
BEEP=1; //关闭蜂鸣器
ALAM=1;
EX0=1; //开启外部中断0
EX1=1; //开启外部中断1
if(shanshuo_st) {Disp_alarm(xiaxian);}
}
}
}
/*****外部中断0服务程序*****/
void int0(void) interrupt 0
{
EX0=0; //关外部中断0
if(DEC==0&&set_st==1)
{
do{
Disp_alarm(shangxian);
}while(DEC==0);
shangxian--;
if(shangxian<xiaxian)shangxian=xiaxian;
}
else if(DEC==0&&set_st==2)
{
do{
Disp_alarm(xiaxian);
}while(DEC==0);
xiaxian--;
//if(xiaxian<0)xiaxian=0;
}
}
设计文件:
链接:https://pan.baidu.com/s/1Z83iGcX9S9UORFQQ6GvTCg?pwd=z3oc















 4331
4331











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









