






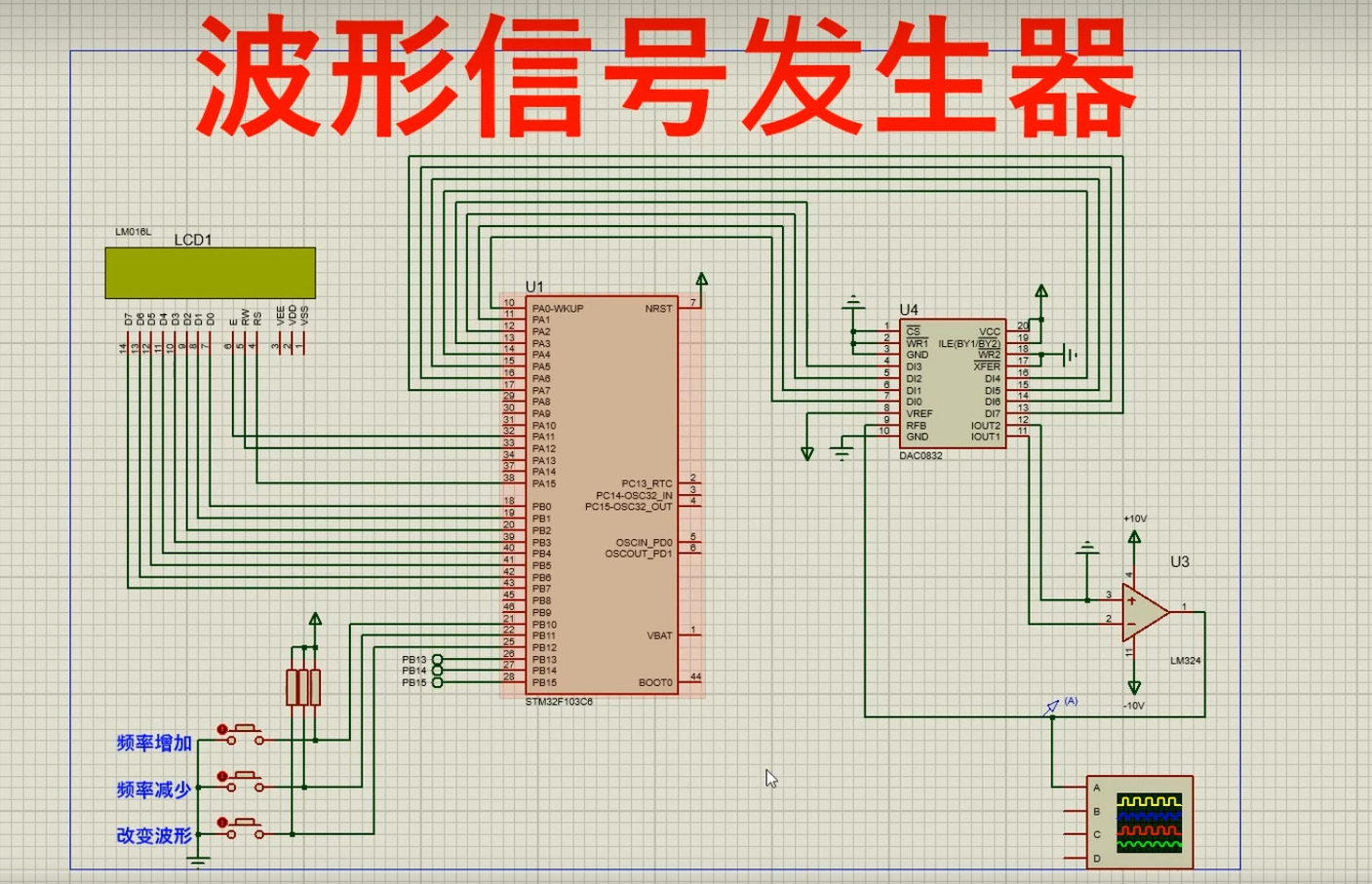
仿真图:
功能简介:
采用51单片机作为控制器,最小系统有晶振电路,由于32在仿真内很卡因此去掉了复位电路
液晶显示采用LCD1602用于显示该项目的参数信息
采用DAC0832将模拟信号转换为数字信号再经过运放LM324跟随器输出
芯片/模块的特点:
DAC0832特点:
分辨率:DAC0832具有8位的分辨率,即可以将数字输入转换为256个不同的模拟输出级别。它能够提供精确的模拟输出信号。
双通道输出:DAC0832具有两个独立的模拟输出通道,可以同时产生两个不同的模拟输出信号。这使得它适用于需要多个模拟输出的应用。
串行接口:DAC0832通过串行接口进行通信和控制。它使用少数几个引脚(数据引脚、时钟引脚和片选引脚),可以与主控器件进行数据交换和时钟同步。
低功耗设计:DAC0832采用低功耗设计,在工作时功耗较低。它还具有自动功耗优化功能,可以在闲置状态下自动进入低功耗模式。
内部参考电压:DAC0832内部集成了参考电压,可以为模拟输出提供稳定的参考值。它还支持外部参考电压输入,以满足不同的应用需求。
输出保持功能:DAC0832具有输出保持功能,在电源投入或重启后,可以保持上一次的模拟输出值,避免输出的不确定性。
单电源供电:DAC0832可以使用单一电源(5V)进行供电,简化了电路设计和连接。
LM324特点:
四路运算放大器:LM324内部集成了四个独立的运算放大器,每个放大器都具有高增益和高输入阻抗。这使得LM324能够同时处理四个不同的信号。
宽工作电压范围:LM324具有宽广的工作电压范围,供电电压可以在单一供电电压范围内(通常为3V至32V)。
高增益和稳定性:LM324具有高增益和稳定性,能够提供精确的放大功能。它适用于各种需要放大信号、增加增益的应用。
低功耗:LM324采用低功耗设计,在工作时功耗较低。这使得它适用于对功耗要求较高的电池供电应用。
宽输入和输出电压范围:LM324能够接受宽广的输入电压范围,并且可以提供与供电电压范围相匹配的输出电压范围,能够适应不同的信号级别。
多种封装形式:LM324可以提供不同的封装形式,如多引脚直插式封装(DIP)和表面贴装技术(SMT)封装。这使得它适应不同应用的安装需求。
主程序:
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* <h2><center>© Copyright (c) 2021 STMicroelectronics.
* All rights reserved.</center></h2>
*
* This software component is licensed by ST under BSD 3-Clause license,
* the "License"; You may not use this file except in compliance with the
* License. You may obtain a copy of the License at:
* opensource.org/licenses/BSD-3-Clause
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "stdarg.h"
#include "stdio.h"
#include "string.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
///LCD1602使能端口控制
#define BSP_LCD1602_EN_H HAL_GPIO_WritePin(LCD1602_EN_GPIO_Port, LCD1602_EN_Pin, GPIO_PIN_SET)
#define BSP_LCD1602_EN_L HAL_GPIO_WritePin(LCD1602_EN_GPIO_Port, LCD1602_EN_Pin, GPIO_PIN_RESET)
///LCD1602读/写端口控制
#define BSP_LCD1602_RW_H HAL_GPIO_WritePin(LCD1602_RW_GPIO_Port, LCD1602_RW_Pin, GPIO_PIN_SET)
#define BSP_LCD1602_RW_L HAL_GPIO_WritePin(LCD1602_RW_GPIO_Port, LCD1602_RW_Pin, GPIO_PIN_RESET)
///LCD1602指令/数据端口控制
#define BSP_LCD1602_RS_H HAL_GPIO_WritePin(LCD1602_RS_GPIO_Port, LCD1602_RS_Pin, GPIO_PIN_SET)
#define BSP_LCD1602_RS_L HAL_GPIO_WritePin(LCD1602_RS_GPIO_Port, LCD1602_RS_Pin, GPIO_PIN_RESET)
#define W_SINE 1
#define W_TRI 2
#define W_SAW 3
#define W_SQU 4
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
TIM_HandleTypeDef htim1;
TIM_HandleTypeDef htim2;
/* USER CODE BEGIN PV */
static uint8_t display_buf[16];
static unsigned char tab[256]= //正弦表
{
0x80,0x83,0x86,0x89,0x8d,0x90,0x93,0x96,0x99,0x9c,0x9f,0xa2,0xa5,0xa8,0xab,0xae,0xb1,0xb4,0xb7,0xba,0xbc,0xbf,0xc2,0xc5,
0xc7,0xca,0xcc,0xcf,0xd1,0xd4,0xd6,0xd8,0xda,0xdd,0xdf,0xe1,0xe3,0xe5,0xe7,0xe9,0xea,0xec,0xee,0xef,0xf1,0xf2,0xf4,0xf5,
0xf6,0xf7,0xf8,0xf9,0xfa,0xfb,0xfc,0xfd,0xfd,0xfe,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xfe,0xfd,
0xfd,0xfc,0xfb,0xfa,0xf9,0xf8,0xf7,0xf6,0xf5,0xf4,0xf2,0xf1,0xef,0xee,0xec,0xea,0xe9,0xe7,0xe5,0xe3,0xe1,0xde,0xdd,0xda,
0xd8,0xd6,0xd4,0xd1,0xcf,0xcc,0xca,0xc7,0xc5,0xc2,0xbf,0xbc,0xba,0xb7,0xb4,0xb1,0xae,0xab,0xa8,0xa5,0xa2,0x9f,0x9c,0x99,
0x96,0x93,0x90,0x8d,0x89,0x86,0x83,0x80,0x80,0x7c,0x79,0x76,0x72,0x6f,0x6c,0x69,0x66,0x63,0x60,0x5d,0x5a,0x57,0x55,0x51,
0x4e,0x4c,0x48,0x45,0x43,0x40,0x3d,0x3a,0x38,0x35,0x33,0x30,0x2e,0x2b,0x29,0x27,0x25,0x22,0x20,0x1e,0x1c,0x1a,0x18,0x16,
0x15,0x13,0x11,0x10,0x0e,0x0d,0x0b,0x0a,0x09,0x08,0x07,0x06,0x05,0x04,0x03,0x02,0x02,0x01,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x01,0x02,0x02,0x03,0x04,0x05,0x06,0x07,0x08,0x09,0x0a,0x0b,0x0d,0x0e,0x10,0x11,0x13,0x15,
0x16,0x18,0x1a,0x1c,0x1e,0x20,0x22,0x25,0x27,0x29,0x2b,0x2e,0x30,0x33,0x35,0x38,0x3a,0x3d,0x40,0x43,0x45,0x48,0x4c,0x4e,
0x51,0x55,0x57,0x5a,0x5d,0x60,0x63,0x66,0x69,0x6c,0x6f,0x72,0x76,0x79,0x7c,0x80
};
static uint8_t mode = 1;
static uint16_t freq = 20;
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_TIM2_Init(void);
static void MX_TIM1_Init(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
void delay_us(uint16_t nus)//us延时
{
__HAL_TIM_SetCounter(&htim2,0);
__HAL_TIM_ENABLE(&htim2);
while(__HAL_TIM_GetCounter(&htim2)<nus);
__HAL_TIM_DISABLE(&htim2);
}
/*---------------------------------------------------------------------------*/
static void lcd1602_delay_1us(void)
{
delay_us(1);
}
/*---------------------------------------------------------------------------*/
void lcd1602_delay_1ms(void)
{
HAL_Delay(1);
}
/*---------------------------------------------------------------------------*/
static void lcd1602_port_write(uint8_t val)//1602写入数据
{
if(val & 0x80){
HAL_GPIO_WritePin(LCD1602_D7_GPIO_Port, LCD1602_D7_Pin, GPIO_PIN_SET);
}else{
HAL_GPIO_WritePin(LCD1602_D7_GPIO_Port, LCD1602_D7_Pin, GPIO_PIN_RESET);
}
if(val & 0x40){
HAL_GPIO_WritePin(LCD1602_D6_GPIO_Port, LCD1602_D6_Pin, GPIO_PIN_SET);
}else{
HAL_GPIO_WritePin(LCD1602_D6_GPIO_Port, LCD1602_D6_Pin, GPIO_PIN_RESET);
}
if(val & 0x20){
HAL_GPIO_WritePin(LCD1602_D5_GPIO_Port, LCD1602_D5_Pin, GPIO_PIN_SET);
}else{
HAL_GPIO_WritePin(LCD1602_D5_GPIO_Port, LCD1602_D5_Pin, GPIO_PIN_RESET);
}
if(val & 0x10){
HAL_GPIO_WritePin(LCD1602_D4_GPIO_Port, LCD1602_D4_Pin, GPIO_PIN_SET);
}else{
HAL_GPIO_WritePin(LCD1602_D4_GPIO_Port, LCD1602_D4_Pin, GPIO_PIN_RESET);
}
if(val & 0x08){
HAL_GPIO_WritePin(LCD1602_D3_GPIO_Port, LCD1602_D3_Pin, GPIO_PIN_SET);
}else{
HAL_GPIO_WritePin(LCD1602_D3_GPIO_Port, LCD1602_D3_Pin, GPIO_PIN_RESET);
}
if(val & 0x04){
HAL_GPIO_WritePin(LCD1602_D2_GPIO_Port, LCD1602_D2_Pin, GPIO_PIN_SET);
}else{
HAL_GPIO_WritePin(LCD1602_D2_GPIO_Port, LCD1602_D2_Pin, GPIO_PIN_RESET);
}
if(val & 0x02){
HAL_GPIO_WritePin(LCD1602_D1_GPIO_Port, LCD1602_D1_Pin, GPIO_PIN_SET);
}else{
HAL_GPIO_WritePin(LCD1602_D1_GPIO_Port, LCD1602_D1_Pin, GPIO_PIN_RESET);
}
if(val & 0x01){
HAL_GPIO_WritePin(LCD1602_D0_GPIO_Port, LCD1602_D0_Pin, GPIO_PIN_SET);
}else{
HAL_GPIO_WritePin(LCD1602_D0_GPIO_Port, LCD1602_D0_Pin, GPIO_PIN_RESET);
}
}
/*---------------------------------------------------------------------------*/
static uint8_t lcd1602_read_state(void)//1602读取状态
{
uint8_t state;
///下面为lcd操作时序
BSP_LCD1602_RS_L;
BSP_LCD1602_RW_H;
BSP_LCD1602_EN_H;
lcd1602_delay_1us();
state = HAL_GPIO_ReadPin(LCD1602_D7_GPIO_Port, LCD1602_D7_Pin);
BSP_LCD1602_EN_L;
lcd1602_delay_1us();
return state;
}
/*---------------------------------------------------------------------------*/
static void lcd1602_busy_wait(void)//1602空闲判断
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
uint16_t timeout;
GPIO_InitStruct.Pin = LCD1602_D7_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(LCD1602_D7_GPIO_Port, &GPIO_InitStruct);
timeout = 0xffff;
while((lcd1602_read_state() & 0x80) == 0x80){
timeout--;
if(timeout == 0){
break;
}
}
lcd1602_delay_1us();
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
HAL_GPIO_Init(LCD1602_D7_GPIO_Port, &GPIO_InitStruct);
}
/*---------------------------------------------------------------------------*/
static void lcd1602_write_data(uint8_t dat)//1602写数据
{
///下面为lcd1602操作时序
lcd1602_busy_wait();
BSP_LCD1602_RS_H;
BSP_LCD1602_RW_L;
BSP_LCD1602_EN_L;
lcd1602_port_write(dat);
BSP_LCD1602_EN_H;
lcd1602_delay_1us();
BSP_LCD1602_EN_L;
}
/*---------------------------------------------------------------------------*/
static void lcd1602_write_command(uint8_t cmd)//1602写命令
{
///下面为lcd1602操作时序
lcd1602_busy_wait();
BSP_LCD1602_RS_L;
BSP_LCD1602_RW_L;
BSP_LCD1602_EN_L;
lcd1602_port_write(cmd);
BSP_LCD1602_EN_H;
lcd1602_delay_1us();
BSP_LCD1602_EN_L;
}
/*---------------------------------------------------------------------------*/
void lcd1602_init(void)//1602初始化
{
lcd1602_write_command(0x38); ///<设置16 X 2显示, 5 X 7点阵, 8位数据接口
lcd1602_delay_1ms();
lcd1602_write_command(0x01); ///<显示清0,数据指针清0
lcd1602_delay_1ms();
lcd1602_write_command(0x06); ///<设置写一个字符后地址加1
lcd1602_delay_1ms();
lcd1602_write_command(0x0c); ///<设置开显示,不显示光标
lcd1602_delay_1ms();
}
/*---------------------------------------------------------------------------*/
void lcd1602_display_char( uint8_t x, uint8_t y, uint8_t ch )//1602输入字符
{
if(x > 15 || y > 1){
return;
}
if(y == 0){
lcd1602_write_command(x | 0x80);///<设置LCD1602第一行要显示的光标位置
}else if(y == 1){
lcd1602_write_command(x | 0x80 | 0x40);///<设置LCD1602第二行要显示的光标位置
}
lcd1602_write_data( ch );
}
/*---------------------------------------------------------------------------*/
void lcd1602_display_string( uint8_t x, uint8_t y, const uint8_t * str )//1602输入字符串
{
while(*str != '\0'){
lcd1602_display_char(x, y, *str); ///<显示一个字符
str++; ///<显示下一个字符
x++; ///<显示下一个位置
if(x > 15){
break;
}
}
}
/*---------------------------------------------------------------------------*/
void lcd1602_clear_display(void)//1602清屏
{
lcd1602_write_command(0x01);
HAL_Delay(5);
}
/*---------------------------------------------------------------------------*/
static void sine_wave(uint8_t location)//输出正弦波
{
static uint8_t i = 0;
location = location * 256 / 100;
GPIOA->ODR = tab[location];
++i;
if(i>=64)
{
i = 0;
}
}
static void tri_wave(uint8_t location)//三角波
{
uint8_t y;
if(location<50)
y=(50-location)*255/50;
else
y=(location-50)*255/50;
GPIOA->ODR = y;
}
static void saw_wave(uint8_t location)//锯齿波
{
GPIOA->ODR = location*255/100;
}
void squ_wave(uint8_t location)//方波
{
if(location<50)
GPIOA->ODR=255;
else
GPIOA->ODR=0x0;
}
static void set_time(void)//
{
uint32_t Period;
Period = 10000 / freq - 1;
htim1.Init.Period = Period;
if (HAL_TIM_Base_Init(&htim1) != HAL_OK)
{
Error_Handler();
}
}
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
if(GPIO_PIN_10 == GPIO_Pin)//频率加
{
HAL_TIM_Base_Stop(&htim1);
if(freq < 20000)
freq += 10;
set_time();
sprintf((char *)display_buf, "Freq:%dHz ", freq);
lcd1602_display_string(0, 0, display_buf);
HAL_TIM_Base_Start_IT(&htim1);
}
if(GPIO_PIN_11 == GPIO_Pin)//频率减
{
HAL_TIM_Base_Stop(&htim1);
if(freq > 20)
freq -= 10;
set_time();
sprintf((char *)display_buf, "Freq:%dHz ", freq);
lcd1602_display_string(0, 0, display_buf);
HAL_TIM_Base_Start_IT(&htim1);
}
if(GPIO_PIN_12 == GPIO_Pin)//锯齿波
{
HAL_TIM_Base_Stop(&htim1);
if(mode == 1)
{
mode = 2;
lcd1602_display_string(0, 1, (uint8_t *)"Triangle wave");
}
else if(mode == 2)
{
mode = 3;
lcd1602_display_string(0, 1, (uint8_t *)"Sawtooth wave");
}
else if(mode == 3)
{
mode = 4;
lcd1602_display_string(0, 1, (uint8_t *)"Square wave ");
}
else if(mode == 4)
{
mode = 1;
lcd1602_display_string(0, 1, (uint8_t *)"Sine wave ");
}
HAL_TIM_Base_Start_IT(&htim1);
}
}
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
static uint8_t times;
if(htim == &htim1)
{
switch(mode)
{
case W_SINE: sine_wave(times);break;//计算出波的位置
case W_TRI: tri_wave(times);break;
case W_SAW: saw_wave(times);break;
case W_SQU: squ_wave(times);break;
}
times++;
if(times>=100)//计数100次
times=0;
}
}
/*---------------------------------------------------------------------------*/
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_TIM2_Init();
MX_TIM1_Init();
/* USER CODE BEGIN 2 */
lcd1602_init();//1602初始化
sprintf((char *)display_buf, "Freq:%dHz ", freq);
lcd1602_display_string(0, 0, display_buf);
lcd1602_display_string(0, 1, (uint8_t *)"Sine wave");
HAL_TIM_Base_Start_IT(&htim1);
set_time();
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_NONE;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_HSI;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_0) != HAL_OK)
{
Error_Handler();
}
}
/**
* @brief TIM1 Initialization Function
* @param None
* @retval None
*/
static void MX_TIM1_Init(void)
{
/* USER CODE BEGIN TIM1_Init 0 */
/* USER CODE END TIM1_Init 0 */
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
/* USER CODE BEGIN TIM1_Init 1 */
/* USER CODE END TIM1_Init 1 */
htim1.Instance = TIM1;
htim1.Init.Prescaler = 7;
htim1.Init.CounterMode = TIM_COUNTERMODE_UP;
htim1.Init.Period = 1000-1;
htim1.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim1.Init.RepetitionCounter = 0;
htim1.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_ENABLE;
if (HAL_TIM_Base_Init(&htim1) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim1, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim1, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM1_Init 2 */
/* USER CODE END TIM1_Init 2 */
}
/**
* @brief TIM2 Initialization Function
* @param None
* @retval None
*/
static void MX_TIM2_Init(void)
{
/* USER CODE BEGIN TIM2_Init 0 */
/* USER CODE END TIM2_Init 0 */
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
/* USER CODE BEGIN TIM2_Init 1 */
/* USER CODE END TIM2_Init 1 */
htim2.Instance = TIM2;
htim2.Init.Prescaler = 7;
htim2.Init.CounterMode = TIM_COUNTERMODE_UP;
htim2.Init.Period = 65535;
htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_ENABLE;
if (HAL_TIM_Base_Init(&htim2) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim2, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim2, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM2_Init 2 */
/* USER CODE END TIM2_Init 2 */
}
/**
* @brief GPIO Initialization Function
* @param None
* @retval None
*/
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_0|GPIO_PIN_1|GPIO_PIN_2|GPIO_PIN_3
|GPIO_PIN_4|GPIO_PIN_5|GPIO_PIN_6|GPIO_PIN_7
|LCD1602_EN_Pin|LCD1602_RW_Pin|LCD1602_RS_Pin, GPIO_PIN_RESET);
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOB, LCD1602_D0_Pin|LCD1602_D1_Pin|LCD1602_D2_Pin|LCD1602_D3_Pin
|LCD1602_D4_Pin|LCD1602_D5_Pin|LCD1602_D6_Pin|LCD1602_D7_Pin, GPIO_PIN_RESET);
/*Configure GPIO pins : PA0 PA1 PA2 PA3
PA4 PA5 PA6 PA7
LCD1602_EN_Pin LCD1602_RW_Pin LCD1602_RS_Pin */
GPIO_InitStruct.Pin = GPIO_PIN_0|GPIO_PIN_1|GPIO_PIN_2|GPIO_PIN_3
|GPIO_PIN_4|GPIO_PIN_5|GPIO_PIN_6|GPIO_PIN_7
|LCD1602_EN_Pin|LCD1602_RW_Pin|LCD1602_RS_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/*Configure GPIO pins : LCD1602_D0_Pin LCD1602_D1_Pin LCD1602_D2_Pin LCD1602_D3_Pin
LCD1602_D4_Pin LCD1602_D5_Pin LCD1602_D6_Pin LCD1602_D7_Pin */
GPIO_InitStruct.Pin = LCD1602_D0_Pin|LCD1602_D1_Pin|LCD1602_D2_Pin|LCD1602_D3_Pin
|LCD1602_D4_Pin|LCD1602_D5_Pin|LCD1602_D6_Pin|LCD1602_D7_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
/*Configure GPIO pins : PB10 PB11 PB12 */
GPIO_InitStruct.Pin = GPIO_PIN_10|GPIO_PIN_11|GPIO_PIN_12;
GPIO_InitStruct.Mode = GPIO_MODE_IT_FALLING;
GPIO_InitStruct.Pull = GPIO_PULLUP;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
/* EXTI interrupt init*/
HAL_NVIC_SetPriority(EXTI15_10_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(EXTI15_10_IRQn);
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
设计文件:
链接:https://pan.baidu.com/s/14EbN1cEW2XjtfBi16kvSXg?pwd=7426















 1555
1555











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









