






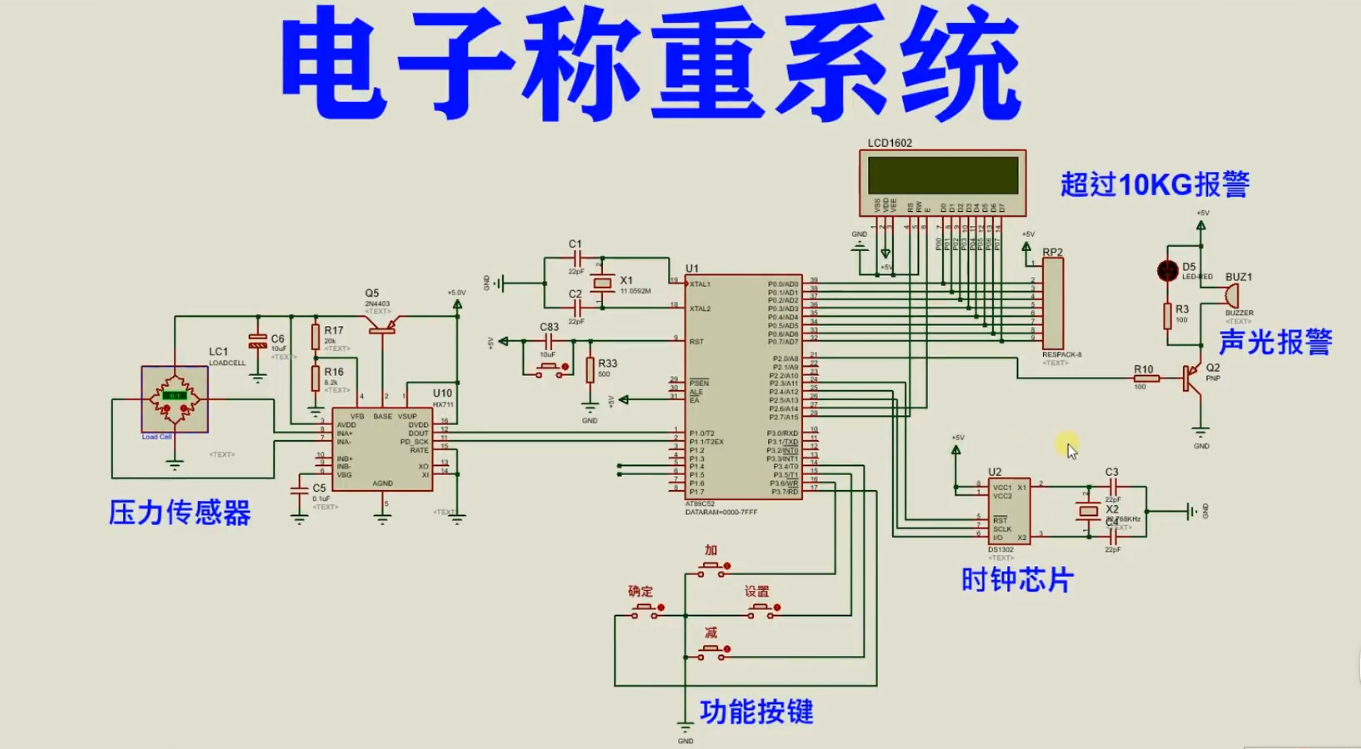
 文章介绍了AT89C52这款单片机的特性,如内部存储器、外部扩展性、低功耗模式等,并结合高精度的HX711和DS1302实时时钟芯片,构建了一个电子秤系统,实现了毛皮重量测量和实时时间显示。
文章介绍了AT89C52这款单片机的特性,如内部存储器、外部扩展性、低功耗模式等,并结合高精度的HX711和DS1302实时时钟芯片,构建了一个电子秤系统,实现了毛皮重量测量和实时时间显示。
仿真图:
芯片/模块的特点:
AT89C52简介:
AT89C52是一款经典的8位单片机,是意法半导体(STMicroelectronics)公司生产的一系列单片机之一。它基于8051内核,并具有许多与其兼容的特性。
AT89C52的主要特点如下:
内部存储器:AT89C52具有8KB的闪存(Flash)存储器,可用于存储用户程序和数据。这些存储器的内容可以通过编程器进行编程和擦除。
RAM存储器:AT89C52配备了256字节的随机存取存储器(RAM),用于暂存数据和程序的变量。
外部扩展性:AT89C52支持多种外部扩展设备的连接,包括外部存储器(如RAM、EEPROM)和外设(如ADC、LCD、UART等),通过外部硬件连接,可以扩展单片机的功能和应用。
通用I/O引脚:AT89C52拥有32个可编程的通用输入/输出引脚,可用于连接外部设备和与其他芯片进行通信。
定时器/计数器:AT89C52内置了3个16位定时器/计数器和一个可编程的串行定时器/计数器。这些计时器/计数器可用于实现定时功能、生成脉冲信号、测量时间间隔等。0
串行通信:AT89C52支持串行通信接口,包括UART(串行异步通信)和SPI(串行外设接口),便于与其他设备进行数据通信和交互。
低功耗模式:AT89C52具有多种低功耗模式,如空闲模式和电源下模式,在不需要执行任务的时候可以将CPU进入低功耗状态以节省能量。
宽电源电压范围:AT89C52的工作电压范围通常为4.0V至5.5V,可以满足大多数应用需求。
HX711特点:
高精度: HX711芯片具有高分辨率和高精度的AD转换能力。它能够实现24位的数据输出,有效提高了传感器的精度和测量的准确性。
低噪声: HX711芯片采用了低噪声放大器和滤波电路,有效地抑制了环境噪声对测量结果的干扰,提高了传感器的信噪比,使得测量结果更加稳定和可靠。
可编程增益: HX711芯片具备可编程增益功能,可以根据不同的传感器和应用需求进行灵活的增益配置,适应不同范围的测量。
低功耗: HX711芯片设计紧凑,功耗低,适合应用于对电池供电或功耗要求较低的场合。
多种通信接口: HX711芯片支持SPI和I2C两种通信接口,方便与不同的控制器和主机进行连接和通信,实现数据的传输和控制。
DS1302特点:
高精度时间计数:DS1302能够提供高精度的实时时钟计数,可以记录年、月、日、星期、小时、分钟和秒等时间信息。它内部集成了晶体振荡器,提供稳定的时钟信号。
低功耗设计:DS1302采用低功耗设计,可以在低功耗模式下运行,有效延长电池寿命。即使在停电情况下,它也能保持时间数据,并通过外部连接电池继续提供计时功能。
串行接口:DS1302通过串行实时时钟接口(SPI)进行通信和控制。使用少数几个引脚,可以与主控器件进行数据交换和时钟同步。
容易集成:DS1302集成了时钟计数和RAM存储器功能,并具有简单的接口和命令,容易与各种微控制器和单片机集成。它不需要复杂的控制信号,可以通过简单的读写命令进行操作。
可编程控制功能:DS1302具有可编程的控制功能,可以设置闹钟、写保护等特殊功能。它还支持多种时间格式的选择,例如24小时制或12小时制。
温度补偿:DS1302内置温度补偿功能,可以校正温度对时钟频率的影响,提高时钟计数的准确性。
高稳定性和抗震动能力:DS1302具有高稳定性和抗震动能力,适用于各种工业和消费类应用场景。
主程序:
#include <reg52.h>
#include <intrins.h>
#include <string.h>
#include "main.h"
#include "LCD1602.h"
#include "HX711.h"
#include "ds1302.h"
sbit KEY_CLEAR = P3^7;
sbit KEY_ADD = P3^6;
sbit KEY_SUB = P3^4;
sbit KEY_SET = P3^5;
sbit BUZZER = P2^0;
unsigned long HX711_Buffer = 0;
unsigned long g_weightMaopi = 0;
unsigned long g_weightMaopiBuf = 0;
long g_weightShiwu = 0;
long g_quPi = 0;
//键盘处理变量
unsigned char g_keyCode;
unsigned char g_keyPressNum = 0;
unsigned char g_setLocation = 0;
unsigned char disTime[16] = " / / : ";
bit g_setTimeFlag = 0;
bit refreshFlag = 0;
//校准参数
//因为不同的传感器特性曲线不是很一致,因此,每一个传感器需要矫正这里这个参数才能使测量值很准确。
//当发现测试出来的重量偏大时,增加该数值。
//如果测试出来的重量偏小时,减小该数值。
//该值可以为小数
#define GAP_VALUE 360
#define MAX_WEIGHT 10000 //单位g,不同秤盘支架需要更改
// 函数声明
void DelayMs(unsigned int n);
void Get_Maopi();
void Get_Weight();
void DisplayWeight();
void KeyPress();
void Init_Timer0();
void DispTime();
void SetTime();
//主函数
void main()
{
Init_LCD1602(); //初始化LCD1602
Init_Timer0();
DS1302_Init();
//初始化完成
// Get_Maopi();
LCD1602_WriteCom(0x80); //指针设置
LCD1602_WriteWord(" Welcome To Use "); //
LCD1602_WriteCom(0x80 + 0x40); //指针设置
LCD1602_WriteWord("Wlectronic Scale");
// DelayMs(2000);
Get_Maopi();
DS1302_Read_Time();
DispTime();
LCD1602_WriteCom(0x80 + 0x40); //指针设置
LCD1602_WriteWord("Weight: 0.000kg");
// Get_Maopi(); //称毛皮重量
while (1)
{
if (refreshFlag)
{
refreshFlag = 0;
if (g_setTimeFlag == 1)
{
SetTime();
}
else
{
DS1302_Read_Time();
DispTime();
TR0 = 0;
Get_Weight();
TR0 = 1;
}
}
KeyPress();
}
}
//称重
void Get_Weight()
{
g_weightShiwu = HX711_Read();
g_weightShiwu = g_weightShiwu - g_weightMaopi; //获取净重
g_weightShiwu = ((float)(g_weightShiwu * 10) / GAP_VALUE) - g_quPi; //计算实物的实际重量
if (g_weightShiwu <= 0)
{
g_weightShiwu = 0;
BUZZER = 1;
LCD1602_WriteCom(0x80 + 0x40);
LCD1602_WriteWord("Weight: 0.000kg");
}
else if (g_weightShiwu > MAX_WEIGHT) //超重报警
{
BUZZER = !BUZZER;
LCD1602_WriteCom(0x80 + 0x40 + 8);
LCD1602_WriteWord("Error!!!");
}
else
{
BUZZER = 1;
DisplayWeight();
}
}
//获取毛皮重量
void Get_Maopi()
{
unsigned char clear;
mm:
g_weightMaopiBuf = HX711_Read();
for (clear = 0; clear < 10; clear++)
{
BUZZER = 1;
DelayMs(100);
}
g_weightMaopi = HX711_Read();
if (g_weightMaopi / GAP_VALUE != g_weightMaopiBuf / GAP_VALUE)
{
goto mm;
}
BUZZER = 0;
DelayMs(500);
BUZZER = 1;
}
//MS延时函数(11.0592M晶振下测试)
void DelayMs(unsigned int n)
{
unsigned int i, j;
for (i = 0; i < n; i++)
for (j = 0; j < 121; j++)
;
}
void DispTime()
{
disTime[1] = '0' + timeBufDec[1] / 10;
disTime[2] = '0' + timeBufDec[1] % 10;
disTime[4] = '0' + timeBufDec[2] / 10;
disTime[5] = '0' + timeBufDec[2] % 10;
disTime[7] = '0' + timeBufDec[3] / 10;
disTime[8] = '0' + timeBufDec[3] % 10;
disTime[10] = '0' + timeBufDec[4] / 10;
disTime[11] = '0' + timeBufDec[4] % 10;
disTime[13] = '0' + timeBufDec[5] / 10;
disTime[14] = '0' + timeBufDec[5] % 10;
LCD1602_WriteCom(0x80); //指针设置
LCD1602_WriteWord(disTime);
}
void SetTime()
{
LCD1602_WriteCom(0x0F);
switch (g_setLocation)
{
case 1: LCD1602_WriteCom(0x80 + 2); break;
case 2: LCD1602_WriteCom(0x80 + 5); break;
case 3: LCD1602_WriteCom(0x80 + 8); break;
case 4: LCD1602_WriteCom(0x80 + 11); break;
case 5: LCD1602_WriteCom(0x80 + 14); break;
case 6: LCD1602_WriteCom(0x0C); DelayMs(5); DS1302_Write_Time(); g_setLocation = 0; g_setTimeFlag = 0; break;
default: ;
}
}
//显示重量,单位kg,两位整数,三位小数
void DisplayWeight()
{
LCD1602_WriteCom(0x80 + 0x40);
LCD1602_WriteWord("Weight: ");
if (g_weightShiwu / 10000 == 0)
{
LCD1602_WriteData(' ');
}
else
{
LCD1602_WriteData(g_weightShiwu / 10000 + '0');
}
LCD1602_WriteData(g_weightShiwu % 10000 / 1000 + '0');
LCD1602_WriteData('.');
LCD1602_WriteData(g_weightShiwu % 1000 / 100 + '0');
LCD1602_WriteData(g_weightShiwu % 100 / 10 + '0');
LCD1602_WriteData(g_weightShiwu % 10 + '0');
LCD1602_WriteData('k');
LCD1602_WriteData('g');
}
void KeyPress()
{
if (KEY_SET == 0) //设置键
{
DelayMs(5);
if (KEY_SET == 0)
{
if (g_setTimeFlag == 0)
{
g_setTimeFlag = 1;
g_setLocation = 1;
}
else if (g_setTimeFlag == 1)
{
g_setLocation++;
}
}
while (!KEY_SET);
}
if (!KEY_CLEAR) //去皮键
{
DelayMs(5);
if (!KEY_CLEAR)
{
// Get_Maopi();
if (g_setTimeFlag == 1)
{
g_setLocation = 6;
}
else
{
if (g_quPi == 0)
{
g_quPi = g_weightShiwu;
}
else
{
g_quPi = 0;
}
}
}
while (!KEY_CLEAR);
}
if (!KEY_ADD) //加
{
DelayMs(180);
if (!KEY_ADD)
{
if (g_setTimeFlag)
{
switch (g_setLocation)
{
case 1:
{
timeBufDec[1]++;
if (timeBufDec[1] > 99)
{
timeBufDec[1] = 0;
}
break;
}
case 2:
{
timeBufDec[2]++;
if (timeBufDec[2] > 12)
{
timeBufDec[2] = 1;
}
break;
}
case 3:
{
timeBufDec[3]++;
if (timeBufDec[3] > YDay(timeBufDec[1], timeBufDec[2]))
{
timeBufDec[3] = 1;
}
break;
}
case 4:
{
timeBufDec[4]++;
if (timeBufDec[4] > 23)
{
timeBufDec[4] = 0;
}
break;
}
case 5:
{
timeBufDec[5]++;
if (timeBufDec[5] > 59)
{
timeBufDec[5] = 0;
}
break;
}
}
}
DispTime();
}
// while (!KEY_ADD);
}
if (!KEY_SUB) //减
{
DelayMs(180);
if (!KEY_SUB)
{
if (g_setTimeFlag)
{
switch (g_setLocation)
{
case 1:
{
if (timeBufDec[1] == 0)
{
timeBufDec[1] = 100;
}
timeBufDec[1]--;
break;
}
case 2:
{
timeBufDec[2]--;
if (timeBufDec[2] < 1)
{
timeBufDec[2] = 12;
}
break;
}
case 3:
{
timeBufDec[3]--;
if (timeBufDec[3] < 1)
{
timeBufDec[3] = YDay(timeBufDec[1], timeBufDec[2]);
}
break;
}
case 4:
{
if (timeBufDec[4] == 0)
{
timeBufDec[4] = 24;
}
timeBufDec[4]--;
break;
}
case 5:
{
if (timeBufDec[5] == 0)
{
timeBufDec[5] = 60;
}
timeBufDec[5]--;
break;
}
}
}
DispTime();
}
// while (!KEY_SUB);
}
}
//定时器0初始化
void Init_Timer0()
{
ET0 = 1; //允许定时器0中断
TMOD &= 0xF0;
TMOD |= 0x01; //定时器工作方式选择
TL0 = 0xb0;
TH0 = 0x3c; //定时器赋予初值
TR0 = 1; //启动定时器
EA = 1;
}
//定时器0中断
void Timer0_ISR(void) interrupt 1
{
static unsigned char cnt1;
TL0 = 0xb0;
TH0 = 0x3c; //定时器赋予初值
cnt1++;
if (cnt1 >= 4)
{
refreshFlag = 1;
cnt1 = 0;
}
}
设计文件:

















 1991
1991

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









