







1.为什么会提出虚拟同步发电机?
早期分布式电源容量小,对电网影响较弱,作为一个不控发电单元不要求参与功率调节。随着容量越来越大,不控方式对电力系统稳定性和安全性造成较大影响,此时就要求在提供电能的基础上,还应有电网电压幅值和频率支撑能力。因此提出了下垂控制,模拟了同步发电机的一次调频特性和一次调压特性。但下垂控制没有模拟同步发电机的惯性,无法像传统同步发电机一样利用转子的转动惯量来抑制电网频率的快速波动。因此,在下垂控制的基础上提出虚拟同步发电机(virtual synchronous generator,VSG)的概念,通过控制使并网逆变器模拟同步发电机的特性,即惯性、一次调频特性和一次调压特性。
2.虚拟同步发电机设计的关键
VSG的控制参数设计非常关键,它不仅要满足系统稳定性和动态性能的要求,还需要抑制瞬时输出功率中脉动量对系统的影响。根据瞬时功率理论,VSG输出的瞬时功率存在一定的脉动量,当将该瞬时功率反馈进行闭环控制时,控制环路必须对功率中的脉动量进行有效抑制,否则会导致输出电压和电流的畸变,甚至导致系统不稳定。而上述的控制性能要求,与 VSG 的有功环和无功环环路增益的截止频率(fc),相角裕度(PM)等密切相关。因此,可以根据fc、PM等约束条件的要求,优化设计VSG的控制参数。
3.虚拟同步发电机的基本原理
图1为VSG的主电路拓扑和控制结构,其中:Q1—Q6组成三相逆变桥;逆变器侧电感L1、滤波电容C和网侧电感L2构成LCL型滤波器。
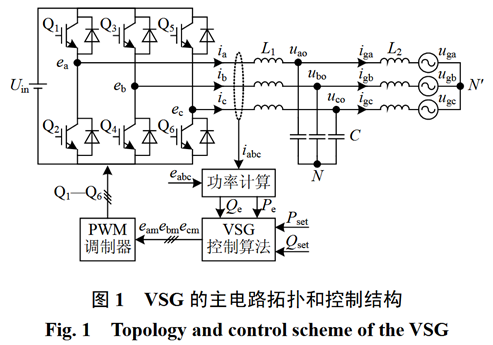
从并网逆变器主电路与同步发电机电气部分等效的角度来看,可以认为并网逆变器桥臂中点电压的基波ea、eb和ec模拟了同步发电机的内电势,逆变器侧电感L1模拟同步发电机的同步电抗,逆变器输出电压(电容电压)uao、ubo、uco模拟同步发电机的端电压。VSG的输出有功功率Pe和无功功率Qe通过瞬时功率理论计算得到,即:
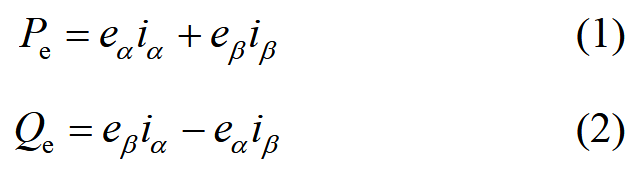
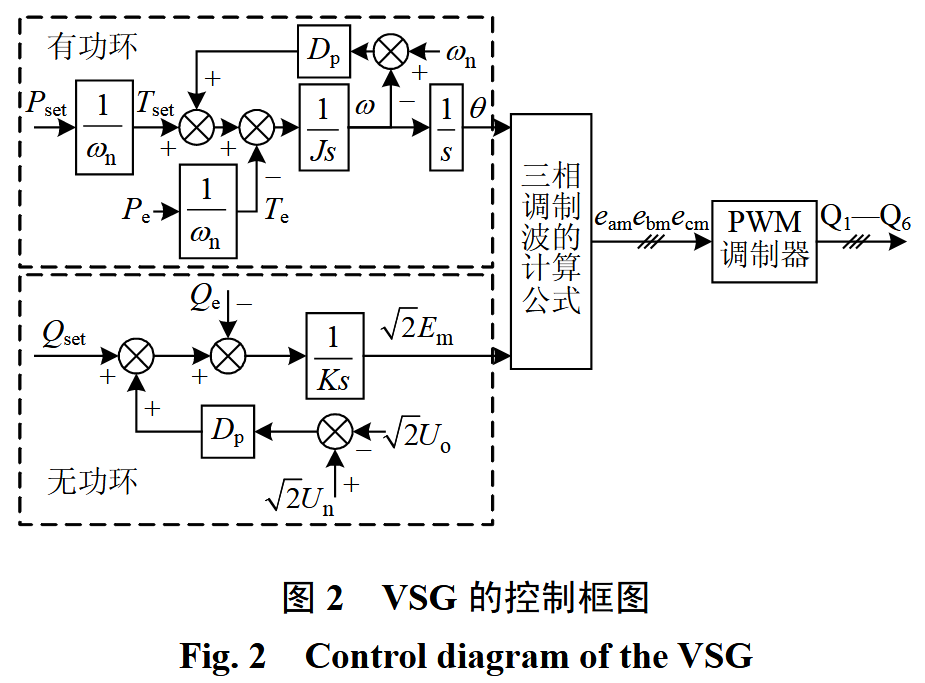
图2为VSG的控制框图,由图2可知,VSG的有功环模拟了同步发电机的惯性和一次调频特性,无功环模拟了同步发电机的一次调压特性。VSG有功环和无功环的数学方程如下:
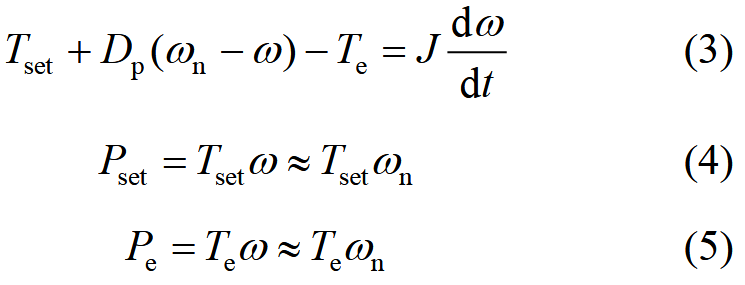
式中:Pset和Qset为有功功率和无功功率的给定;Tset为转矩给定;Te为电磁转矩;Dp为有功–频率下垂阻系数;Dq为无功–电压下垂系数;ω为VSG的角频率;ωn为额定角频率;Uo为输出电压有效值;Un为额定电压有效值;J为虚拟转动惯量。
从上面的分析可知,VSG的有功环和无功环模拟了同步发电机的特性。VSG有功环的输出作为逆变器调制波的频率和相位,无功环的输出作为逆变器调制波的幅值。则三相调制波eam、ebm和ecm的表达式为:
三相调制波与PWM调制器的载波交截,得到三相逆变桥六只开关管的驱动信号,进而得到桥臂中点电压ea、eb和ec。调制波到桥臂中点电压的传递函数为KPWM = Uin/(2Utri),其中:Uin为输入电压,Utri为三角载波的幅值。
4.同步电机建模
4.1电气部分建模
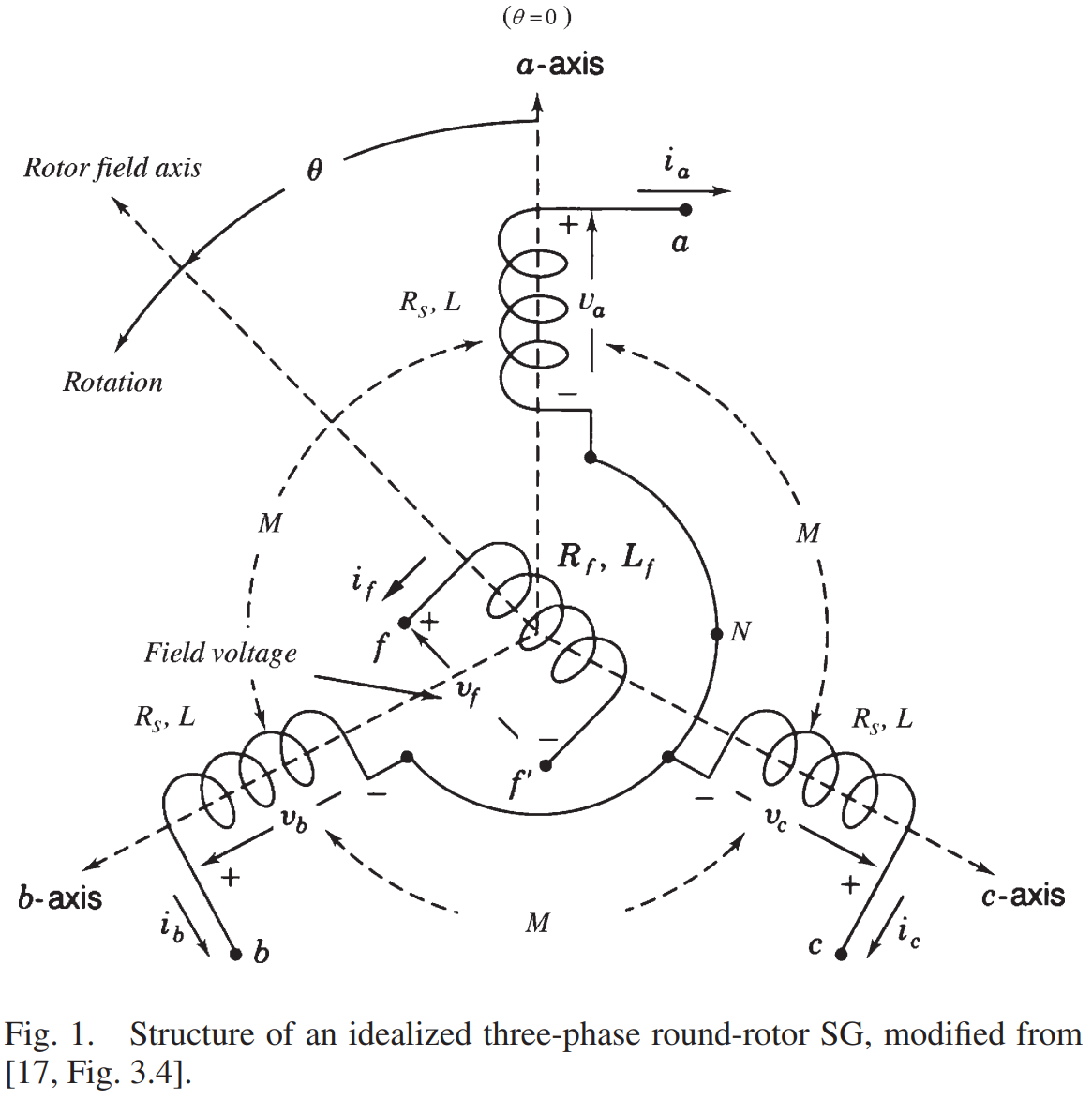
磁场和三个相同的定子绕组分布在均匀空气间隙周围的槽中。定子绕组可以看作是具有自感L和互感-M的集中线圈(M>0,典型值为1/2L,负号是因为三个绕组之间各差2π/3的相角),如图1所示。转子绕组可视为具有自感Lf的集中线圈。转子线圈和三个定子线圈之间的互感随转子的不同而变化,即:
其中Mf>0。绕组的磁链为(自感+两个定子绕组的互感+转子绕组的互感):
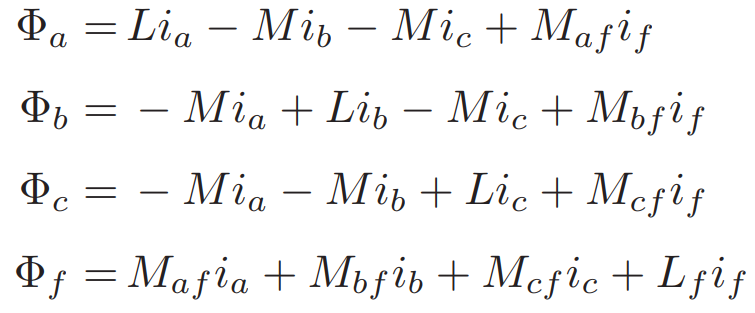
其中,ia、ib、ic为定子相电流,if为转子励磁电流。表示为:
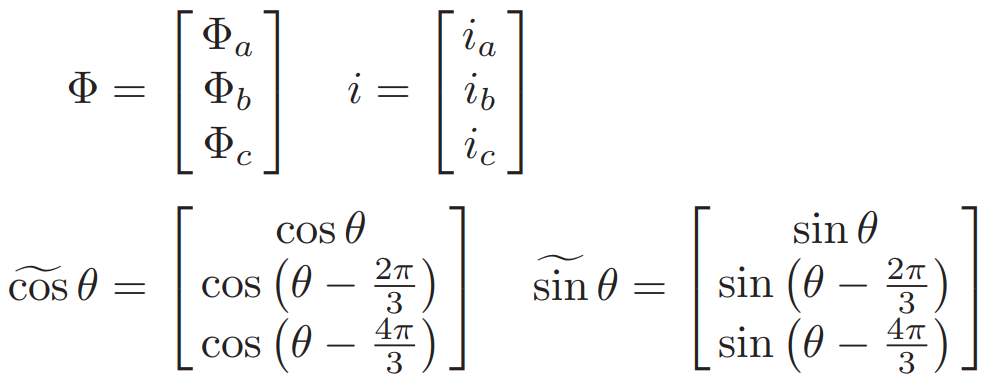
假设中性线暂时没有连接,那么:
![]()
由此可知,定子磁链可以改写为:
![]()
其中Ls=L+M,而转子磁链可重新表示为:
![]()
其中<×,×>表示内积。如果三相电流为正弦(作为θ的函数)且平衡,则第二项![]() (称为电枢反应)是恒定的。且
(称为电枢反应)是恒定的。且![]() 为电流的d轴分量。
为电流的d轴分量。
设定子绕组的电阻为Rs;则相端电压v = [va vb vc]T可由式(1)得到,为:

其中,e = [ea eb ec]T为转子转动带来的反电动势:

电压矢量e也称为空载电压或同步内部电压。
与式(3)同理,由式(2)可知端电压为:

式中Rf为转子绕组的电阻。然而,我们不需要vf的表达式,因为我们将使用if代替vf作为可调常数输入。这就完成了电机电气部分的建模。
4.2机械部分建模
电机的机械部分由:
![]()
式中,J为与转子一起转动的所有部件的转动惯量,Tm为机械转矩,Te为电磁转矩,Dp为阻尼系数。Te由存储在电机的总能量E可得,总能量E</
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 881
881

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











