







 作者计划通过大鱼机器人平衡车项目来巩固STM32知识,学习过程包括:研究平衡车选型与工作原理,观看UP主【天下行走】的B站教程视频进行编程,同时参考【平衡小车之家】的资料。硬件选用大鱼电子的系统板、电机和底盘,配置编码器、电机控制及MPU6050传感器。在代码层面,初始化了延时、NVIC、串口、OLED显示、MPU6050、编码器和PWM等模块。
作者计划通过大鱼机器人平衡车项目来巩固STM32知识,学习过程包括:研究平衡车选型与工作原理,观看UP主【天下行走】的B站教程视频进行编程,同时参考【平衡小车之家】的资料。硬件选用大鱼电子的系统板、电机和底盘,配置编码器、电机控制及MPU6050传感器。在代码层面,初始化了延时、NVIC、串口、OLED显示、MPU6050、编码器和PWM等模块。
经过一段时间的学习,打算做个小小的项目实操一下,以加强深化对于裸机项目的整体构思、进一步熟悉开发流程
边学边找,最后发现大鱼机器人的平衡车项目比较适合我的当前阶段
学习规划
1、通过大鱼机器人的配套学习资料了解平衡车的选型、原理
2、观看B站UP主【天下行走】的教程视频,结合运用之前所学的STM32知识进行具体的代码编写
- 视频链接
- UP主

- gitee
https://gitee.com/GFPhoenix https://gitee.com/GFPhoenix
https://gitee.com/GFPhoenix
3、查阅【平衡小车之家】的资料合集,集百家所长,总结出自己对于平衡车系统的理解
- 平衡小车论坛(轮趣科技)
硬件使用
大鱼电子的平衡小车系统板
大鱼电子平衡小车电机和底盘
航模3s电池
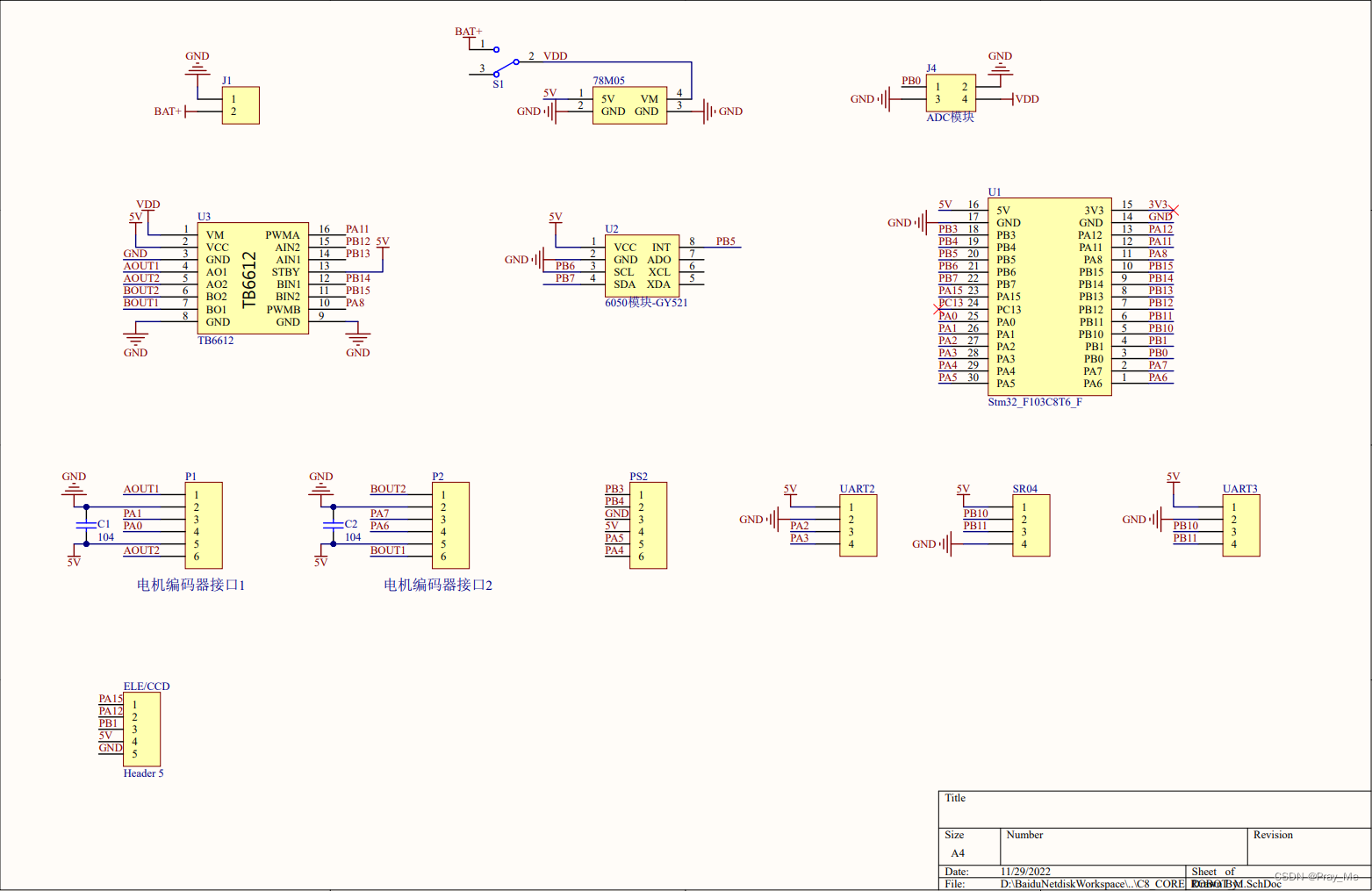
硬件占用的GPIO的框架
编码器1——PA0/PA1---TIM2
编码器2——PB6/PB7---TIM4
电机1——PB12/PB13
电机2——PB14/PB15
PWM1——PA8
PWM2——PA11
MPU6050中断引脚——PB5
MPU6050所用IIC——PB3/PB4
主函数
#include "sys.h"
int main(void)
{
delay_init();
NVIC_Configuration();
Usart3_Init(9600);
OLED_Init();
OLED_Clear();
MPU_Init();
mpu_dmp_init();
MPU6050_EXTI_Init();
Encoder_TIM2_Init();
Encoder_TIM3_Init();
PWM_Init_TIM1(0,7199);
Motor_Init();
OLED_ShowBasic();
while(1)
{
OLED_ShowMessage();
}
}
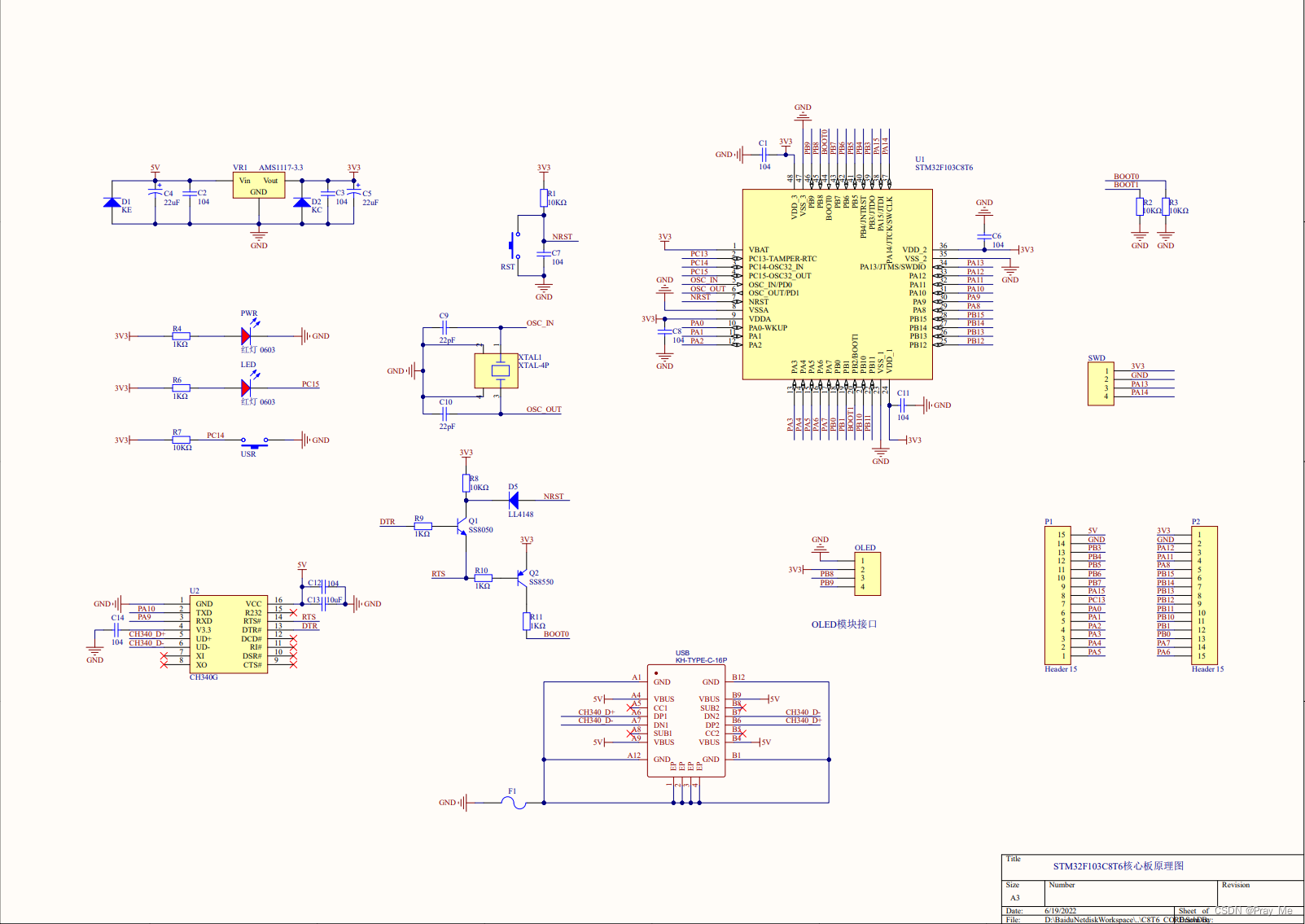
核心板原理图
转接板原理图


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









