






雷达
LEIDA-感知生活中的美



雷达的介绍
雷达是英文radar的⾳译,“Radio Detection and Ranging ”的缩写。原意为"无线电探测和测距",即用无线电的方法发现目标并测定它们的空间位置。因此,雷达也被称为“无线电定位”。雷达最先是作为一种军事装备服务于人类,主要用来实施国土防空警戒,指挥和引导己方作战飞机以及各种地面防空武器。随着雷达技术的不断改进,如今雷达被广泛用于民航管制、地形测量、气象、航海等众多领域。
从中可以提取出三个关键词 “无线电探测”、“测距”、“无线电定位”。
那么咱们选个角度思考一下,什么硬件设备组成可以实现 “无线电探测”、“测距”、“无线电定位”呢?工作流程及工作原理是什么呢?
雷达⼯作原理
发射机在定时器控制下,产⽣⾼频⼤功率的脉冲串,通过收发开关到达定向天线,以电磁波形式向外辐射。在天线控制设备的控制下,天线波束按照指定⽅向在空间扫描,当电磁波照射到⽬标上,⼆次散射电磁波的⼀部分到达雷达天线,经收发开关⾄接收机,进⾏放⼤、混频和检波处理后,送到雷达终端设备,能判断⽬标的存在、⽅位、距离、速度等。
雷达的任务
利⽤⽬标对电磁波的反射来发现⽬标并对⽬标进⾏定位。随着雷达技术的发展,雷达的任务不仅仅是测量⽬标的距离、⽅位和仰⾓,⽽且还包括测量⽬标的速度,以及从⽬标回波中获取更多有关⽬标的信息。
雷达硬件组成设备
发射机:为雷达核心部件之一,它负责产生和发射出一定频率和脉冲宽度的雷达信号。通过调制和形成处理后,信号会通过天线发射出去,然后由目标反射回来。
天线:雷达的传感器,它的主要作用是接收目标反射回来的信号并将其送到接收机中进一步的处理。天线的种类和形式十分多样,如微带天线、开口波导天线等。
接收机:用于接收由目标反射回来并通过天线传输到接收机的雷达信号,并将信号转换成电信号进行进一步处理。
信号处理单元:雷达信号处理单元主要用于计算反射信号的性质,包括目标的距离、方位角、高度等,以及计算目标的速度和运动方向等信息。信号A处理单元是实现雷达目标识别和追踪的基础。
显示与控制单元:雷达显示与控制单元主要包括一个带有显示器的终端设备和用于雷达控制的处理器。它将接收和处理的雷达信号显示出来,并提供雷达的控制和监控功能。
注释:当然不同雷达设备的组成各不相同,故简单挑选以上五个模块进行说明及讲解。
雷达相关模块设备(如下图)







注释:如上图调制器与磁控管二者结合为磁控管发射机;固定发射机与固定发射机板结合为固定发射机;雷达分解图分解为雷达防护外壳、收发天线PCB单元、数据计算处理单元、信号输出显示单元(接口输出)。
雷达原理工作框架图
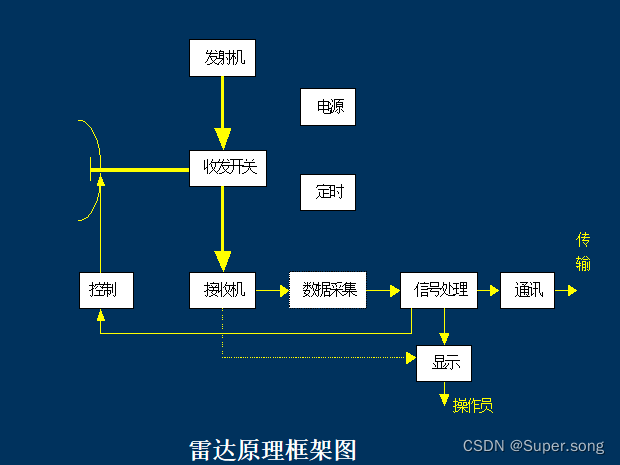

由上图可以出去雷达构成图分别包括(发射机、收发开关、接收机、天线控制、天线、电源、定时器、数据采集、信号处理、通讯传输、显示部分)
发射机在定时器控制下,产生高频大功率的脉冲串,通过收发开关到达定向天线,以电磁波形式向外辐射。
在天线控制设备的控制下,天线波束按照指定方向在空间扫描,当电磁波照射到目标上,二次散射电磁波的一部分到达雷达天线,经收发开关至接收机,进行放大、混频和检波处理后,送到雷达终端设备,能判断目标的存在、方位、距离、速度等。(运行流程:设备供电,定时器启动,发射机产生频率与收发开关导通,处于闭合状态,通过馈线连接天线并发射出去;待电磁波遇到目标物时,会产生折射,将部分电磁波返回天线处,此时天线与收发开关、接收机进行导通(与发射机处于断开状态),再经过一系列流程,数据采集、信号处理,分析出目标物的位置、距离、速度等信息。)
雷达-发射机原理框架图
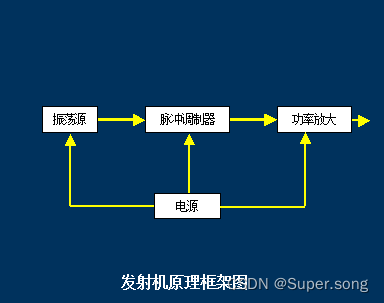
发射机流程说明: 振荡器(源)会产生一个频率随时间逐渐增加的信号,信号遇到障碍后,会反弹回来 。
雷达工作时必须发射功率足够大的电磁波:发射机为雷达提供大功率射频信号,经馈线和收发开关(或环形器)由天线辐射出去。发射功率值由雷达探测链路决定。
接收机原理框架图

接收机流程说明:对雷达天线接收到的微弱信号进行预选、放大、变频、滤波、解调和数字化处理,同时抑制外部的干扰杂波以及机内噪声,使回波信号尽可能多的保持目标信息,以便进一步信号处理和数据处理。
以上工作原理的雷达都有什么种类呢?又分为什么雷达呢?
雷达的分类及常用雷达
首先按成像分类,可分为成像雷达与非成像雷达。

成像雷达注释:
雷达成像方法试图从接收到的信息中计算出类似地图的图像。 经典应用是军用空中监视雷达
非成像雷达注释:
非成像雷达方法使其测量结果以纯数值形式提供;应用包括一些雷达高度计和速度表。 非成像辅助雷达应用是一些私家车中的防盗系统。
非成像雷达包含火控雷达、制导雷达、预警雷达、导航、气象雷达。
成像雷达包含实孔径雷达、合成孔径雷达、逆合成孔经雷达。
AT128激光雷达中,128代表128个激光器;
不同雷达的参数不同?各雷达的应用领域也不同?那生活中哪些方面会涉及到雷达呢?
雷达的应用领域
探地雷达
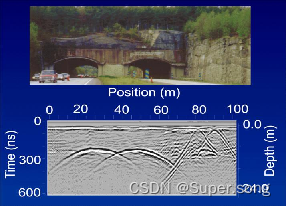
地基检测:如地下管廊、隧道等
管线探测:如国防光缆、电缆等
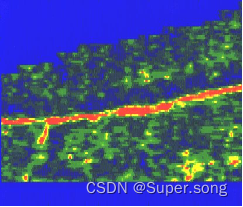
军事领域
注释:小编不太清楚上图雷达具体配置,故不再详细描述其应用环境及应用场景,但小编知道,够快够狠够准就可以,犯我中华者虽远必诛!
汽车和交通领域
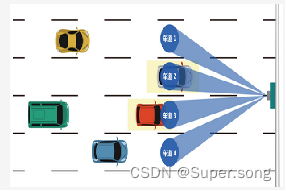
交通流量雷达


如上图所示为森思*克公司所研发设计的交通流量雷达,可实时检测道路车辆的数量及交通压力,并实时反馈交通总控枢纽中心,通过交通广播,交通总控提醒广大司机朋友绕路或更改出发时间点;或联动红绿灯设备临时接管,放行车辆;与可见光相机来说,下雨、夜晚、雾霾、烟雾、曝光等现场环境不影响雷达的正常使用,对于可见光相机来说,下雨天气、雾霾等天气及物镜玻璃有尘土及泥土对可见光相机影响较大;总结就是各有千秋(目前已有雷达与可见光视觉融合的应用案例及设备,较为受欢迎)。
行人检测雷达


如上图所示,左边为行人检测雷达、右侧为应用系统描述图
首先,行人检测雷达安装于行人红绿灯处,有效检测距离为28米;可实时检测人行道上是否有行人通过,并与第三方设备联动,如LED屏提示“行人通行,车辆减速”,声光报警器进行报警,地钉指示灯处于绿色状态,有利于行人通行的安全。
有各别红绿灯,设计为行人过马路,需要在行人灯按下通行按钮,疫情期间因防止交叉感染,故采用行人检测雷达,即实时检测行人数量,待达到设定阈值时,雷达触发(开关量、电平亮)等通信联动红绿灯系统进行变灯流程。
车辆测试雷达

如上图所示为森思*克公司所研发设计的车辆测速雷达,可实时检测道路车辆的车速;
车辆测速雷达常与可见光相机(抓拍相机,如海康、大华等大厂)、补光灯进行联动作业;车辆测速雷达分车道进行测试,可见光负责抓拍实时图片(车牌号),补光灯负责夜间进行补光;各设备间通过RJ45、开关量、RS485、RS232等协议进行触发作业;完成车辆测速的任务。
小编提示:额怎么说呢,测的很准,拍的很清楚,基本上都是4K的相机,最次是2K的,超速20%罚款200元。
道闸触发、防砸雷达


如上图所示为触发雷达、防砸雷达,现场使用图;常用于商场停车场出入口、小区出入口等
车辆触发雷达,与道闸进行联动,通过开关量、RS485、RS232等协议进行触发作业;完成抬杆等动作。
以上只是雷达的部分应用,实际应用范围较广,如安防类:区域入侵雷达;扫描成像雷达等等。
应用领域总结
总结:
雷达是利用电磁波探测目标的电子设备。雷达发射电磁波对目标进行照射并接收其回波,由此获得目标至电磁波发射点的距离、距离变化率(径向速度)、方位、高度等信息。
前景:随着雷达技术的发展,雷达的任务不仅仅是测量目标的距离、方位和仰角;而且还包括测量目标的速度,以及从目标回波中获取更多有关目标的信息。
小编寄言:不对的地方请大家多多指点,本人小白一枚。(如想要此PPT,请与我联系)

















 2万+
2万+




 到【灌水乐园】发言
到【灌水乐园】发言







