






 文章探讨了时空轨迹数据在不同领域的应用,特别是针对非均匀间隔的轨迹点提出了TrajODE模型。该模型结合LSTM和常微分方程(ODE)来连续化建模轨迹,通过ST-gating机制适应不等间距的采样点。实验表明这种方法能更好地捕捉轨迹点间的连续性和变化影响。
文章探讨了时空轨迹数据在不同领域的应用,特别是针对非均匀间隔的轨迹点提出了TrajODE模型。该模型结合LSTM和常微分方程(ODE)来连续化建模轨迹,通过ST-gating机制适应不等间距的采样点。实验表明这种方法能更好地捕捉轨迹点间的连续性和变化影响。
内容持续完善更新中-ing……
一、时空轨迹
时空轨迹作为时空数据四大数据格式(/类型)之一,出现在我们生活、生产的各个方面。交通运输、出行出游、被检测目标的移动等等涉及空间上运动的人或事物都是轨迹数据的生产者。
一般的,我们将现有的时空轨迹数据分成两类:一类是平面中的运动产生(时间1维+平面2维);另一种是立体空间中的运动产生(时间1维+空间3维)。
以下将通过对某篇论文中部分细节的讲解,希望能让读者对“轨迹数据”有初步的了解和思考。【内容即将完善-ing】
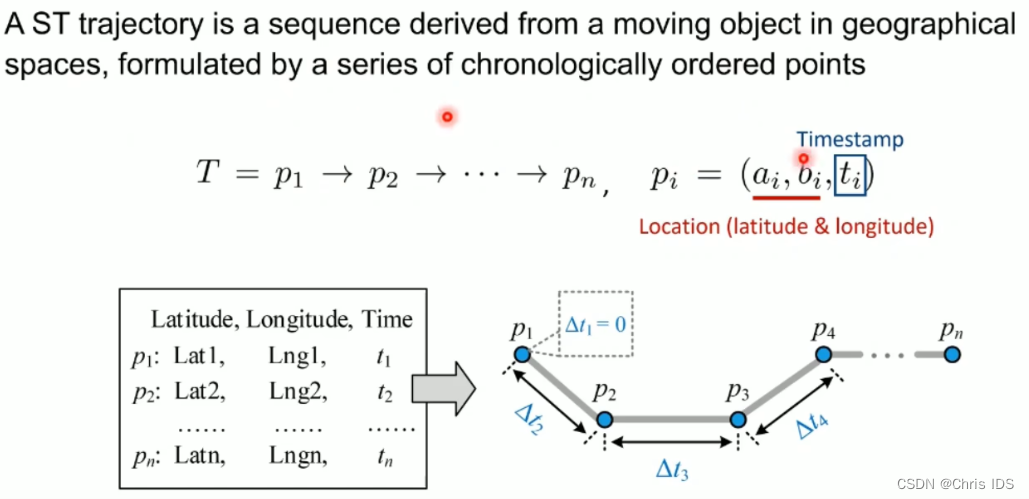
:前两个是描述位置的坐标点,最后一个元素表示时刻。
给出一条轨迹,考虑如何学习其中每个点更好的表示。这些表示会用到下游任务当中。
Challenge
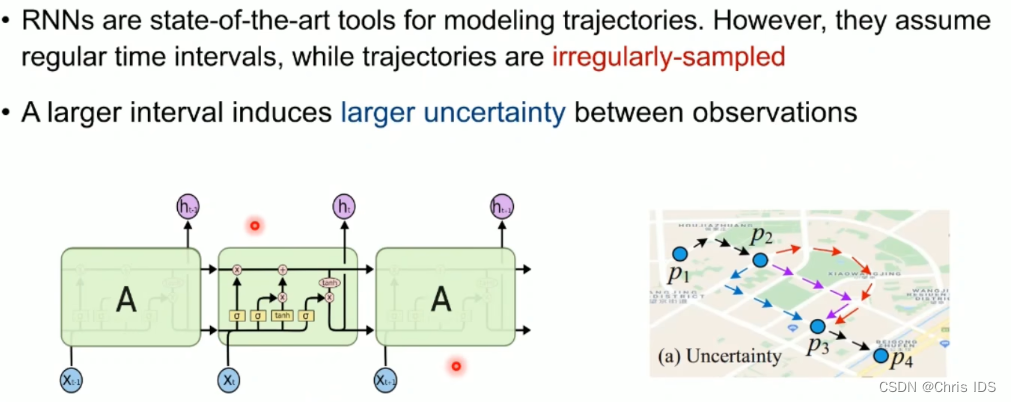
循环神经网络每个unit之间都是等间隔的,而轨迹采样点之间一般是非等间隔的(非均匀)。如上图,P2->P3有时可能会有不同的路线。
论文工作:TrajODE

组成:
ST-ODE encoder: 先对每个轨迹点进行feature extraction得到一个简单的表示。接着,将表示丢入ST-ODE对每两个非均匀间隔的轨迹数据进行连续化建模。
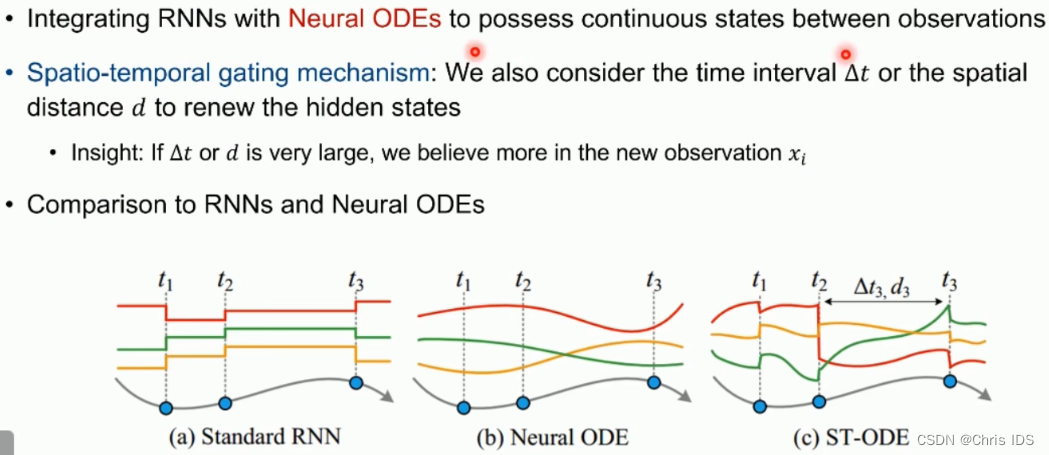
如下图所示,RNN+ODE去学习连的状态,同时考虑两点之间相隔多少时间、多少距离。对于新加入的轨迹点,RNN存在的特征相对静态表示和ODE表示的特征相对连续都有不足。经结合,不仅可有效学习两个状态之间的连续性,也可以有效显示新来状态对原序列的影响(改变)。
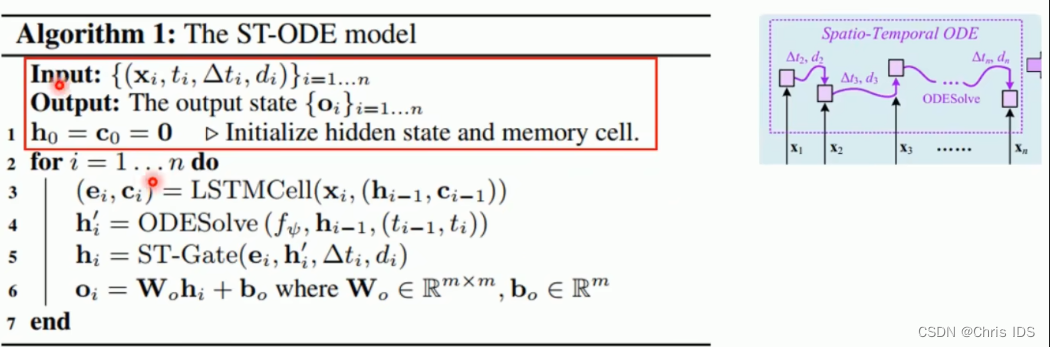 首先,使用LSTM将input embed进hidden,同时防止梯度消失;
首先,使用LSTM将input embed进hidden,同时防止梯度消失;
 接着,上一步的状态通过常微分方程计算出下一步的状态;同时,这样做,可以得到每一个点的之间的状态。
接着,上一步的状态通过常微分方程计算出下一步的状态;同时,这样做,可以得到每一个点的之间的状态。
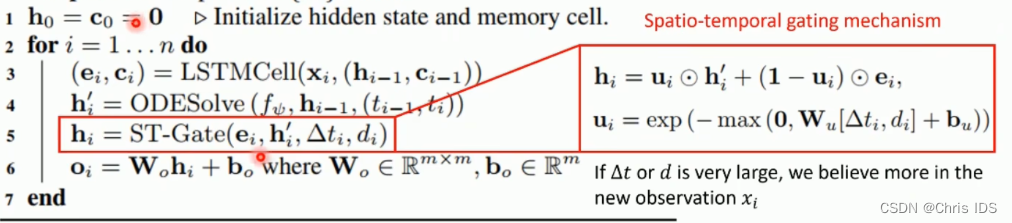 每次得到一个新的点表示后,e_{i}, 会和前面得到点进行融合:ST-gating mechanism:考虑两点时间和空间间隔。如下图:
每次得到一个新的点表示后,e_{i}, 会和前面得到点进行融合:ST-gating mechanism:考虑两点时间和空间间隔。如下图:
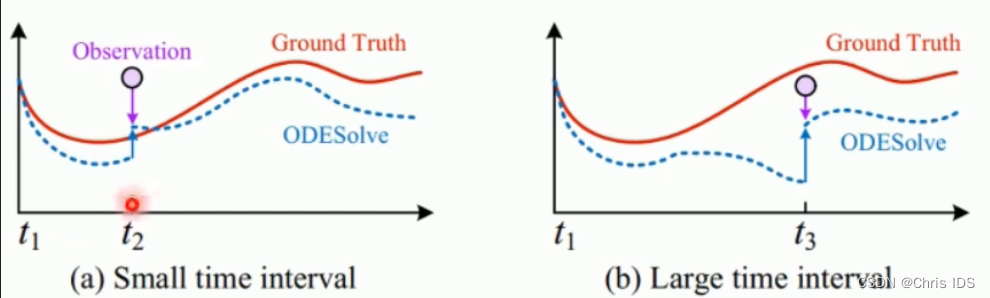
(a) t1、t2间隔较小,认为ODE计算的连续状态更准,更多偏向ODE的状态更少考虑当前的Observation;
(b) 当间隔较大,ODE计算不准,会越来越偏离Ground truth,gating mechanism会更对考虑新到来的点。Think: How to better adapt?
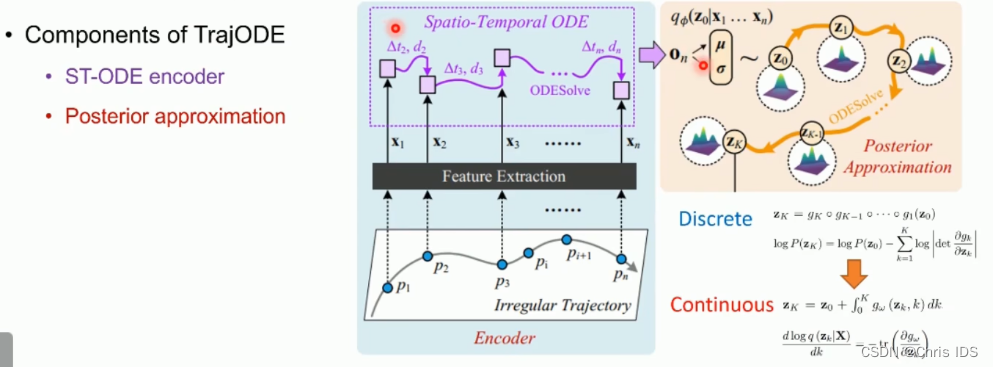
当完成整条轨迹的连续化状态后,接着要进行后验分布。 由于显示情况比较复杂,不能简单使用正态分布。这里使用连续化的标准流。
由于显示情况比较复杂,不能简单使用正态分布。这里使用连续化的标准流。
第三步,对上一步得到的状态进行reconstruction(前一步用到“后验分布”的推断)。第二个lossFuncton根据下游任务设定。
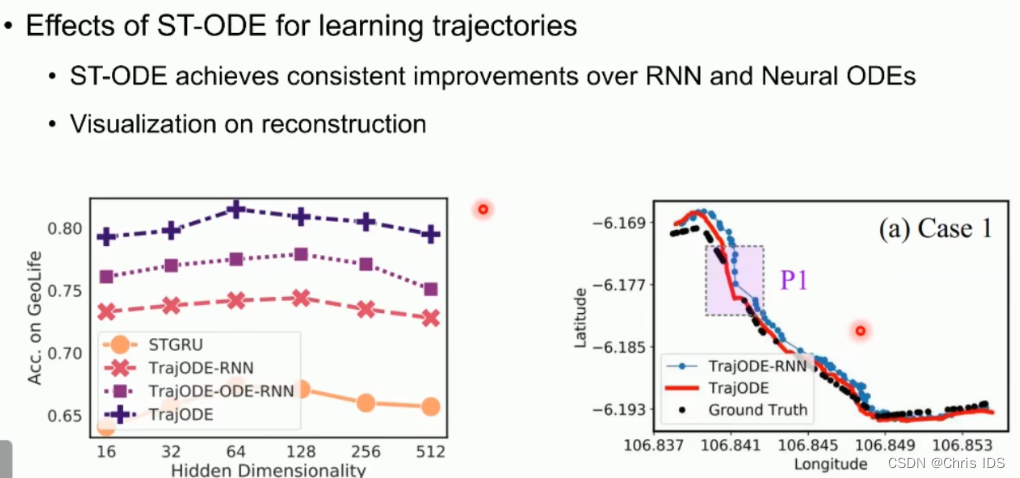
Ablation study

















 313
313

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









