






飞剪程序设计
1.创建工程,选型HCQ0-1200-D。
这边采用禾川的PLC作为Ethercat总站,新建工程,选择第三个(意为标准工程,中文为第二个),定义工程名称,设置放置文件夹(最好新建一个专门存放工程文件的文件夹)。
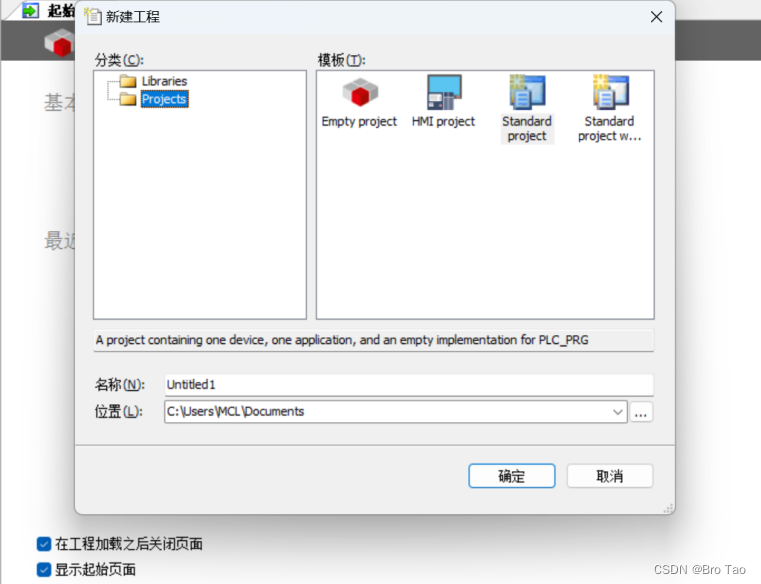

点击确定后,会出现一个弹窗,①为PLC设备型号(看所用的PLC铭牌),②为程序类型,选择结构化文本。

设置允许中英文混合变量
左上方功能栏,文件-->页面设置-->编程选项-->运行标识符使用unicode字符

将软件语言设置成中文
左上方功能栏,工具-->选项...-->往下滑找到-->语言设置-->制定语言设置成中文(简体)旧版,重启软件生效。

库文件放置
1.点击上方功能栏的工具—>包管理器…
2.点击安装
![]()

3.选择要安装的库文件,点击打开—>完全/典型安装-->next-->finish(HQC1安装也是如此)




如果安装软件时已自动安装COODESYS SoftMotion 4.4.0.2软件包则忽略此步
COODESYS SoftMotion 4.4.0.2软件包,存放于COODSYS软件安装目录中的Packages文件夹中。
①为安装软件所在文件夹名,②为Packages文件夹,存放着COODESYS SoftMotion 4.4.0.2软件包。
重复前3点,工具-->包管理器-->安装-->COODESYS SoftMotion 4.4.0.2-->打开-->完全安装-->Finish


伺服驱动器描述文件放置
1.点击上方功能栏的工具—>设备存储库…-->安装

2.找到描述文件路径,下方选择所有支持的描述文件,NV2系列描述文件都安装

- 点击右下方的打开自动安装,两个安装成功后退出NV2系列描述文件夹,返回安装页面。
- 安装—>找到ASD680描述文件路径—>选中找到ASD680描述文件—>打开
- 这边添加的都是不同的伺服的Ethercat描述文件,各位可以增加自己所使用的伺服的描述文件。

如想直接更换型号,可点击Device鼠标右键-->更换设备...-->选择所想要的设备型号

2.所用到的指令

以及
MC_Jog:控制轴进行正反点动、
MC_STOP:停止一个轴的运动,并将轴切换为 Stopping 状态。
MC_Power:将轴进行使能。
MC_Reset:复位轴状态,用于将轴从 ErrorStop 变为 StandStill (轴等待标志/正常可运行)状态,或者复位驱动器故障。
3.相关指令介绍及注意事项
这边采用禾川教学视频中的截图进行说明,禾川这边注释给的还是比较好的,虽然视频没讲啥东西,但有注释在加上官方的说明文档,也大概能看明白这边都是什么东西





1)控制轴点动运行,正向点动由 JogForward 控制,设置为 TRUE 轴即会按照设定的速度、加速度进行正向点动。反向点动由 JogBackward 控制,设置为 TRUE 轴即会按照设定的速度、加速度进行反向点动。
2)点动运行时,如果 JogForward 或者 JogBackwar 从 TRUE 变为 FALSE,轴便会立即按照设定的减速度减速停止。
3)点动过程中轴处于 Continuous Motion 状态。
4)如果 JogForward 和 JogBackward 同时设置为 TRUE,轴将停止运动或不开始运动且不会报错。
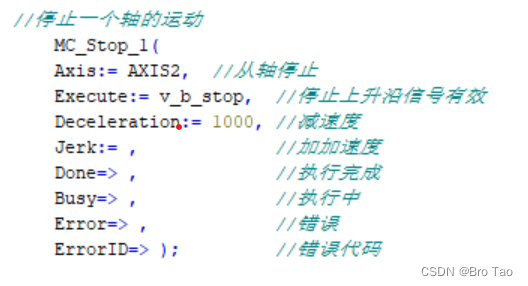
1)本功能块是在正常运行的情况下停止一个轴的运动,并且将轴切换为 Stopping 状态,当轴处于 Stopping 状态任何运动功能 块都是无效的。
2)即使 MC_Stop 停止轴运动已完成,Done 已变为 TRUE,只要不将 Execute 设置为 FALSE,那么轴仍旧会保持为 Stopping 状态。
3)多个 MC_Stop 互相无法打断,所以建议保证程序中一个轴只由一个 MC_Stop 控制,常规停止建议使用 MC_Halt。
4)Mc_Stop 在转矩模式下不可用!

1)断开轴使能时,请勿同时关闭 MC_Power 的 bEnable 和 bRegulatorOn,此操作会出现轴无法断使能的情况,建议不要关闭 MC_Power 的 Enable 引脚。
2)当 bRegulatorRealState 为 TRUE、bDriveStartRealState 为 TRUE, 且轴没有故障产生,Status 引脚将输出为 TRUE,轴 状态将转换为 StandStill,可以执行其他运动控制功能块.
3)在轴运动时将 MC_Power 的 bRegulatorOn 或者 bDriveStart 关闭,此时正在执行的功能块 CommandAborted 变为 TRUE,轴切换为不可运动状态,所有运动控制都停止。

1)本功能块在轴通讯正常的情况下,把轴处于 Errorstop 变成 Standstill,把轴的异常状态变为正常可运行的状态,同时也会复位驱 动器故障状态。
2)如果轴在其他状态下使用 MC_Reset 功能块会报错,轴不会报错,并且不会打断当前轴状态。 无法复位通信相关的故障。
3)通信相关的故障需要再主站与从站重新建立连接,通信正常后,调用 SMC3_ReInitDrive 功能块复位。本功能块对于所有种类的轴都可以使用。
4.电子凸轮的应用


1.建立凸轮表
Application鼠标右键-->添加对象-->Cam表...-->命名-->打开

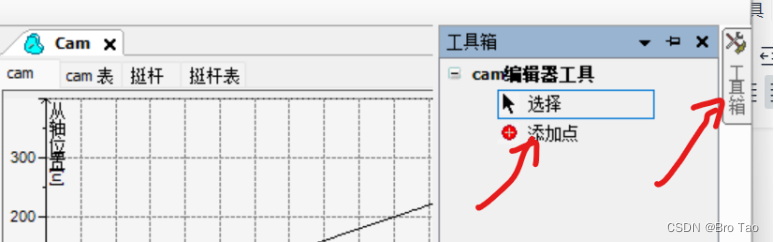
右侧工具箱-->添加点,可在第一个曲线上增加一个任意点,上下拉动能调节位置

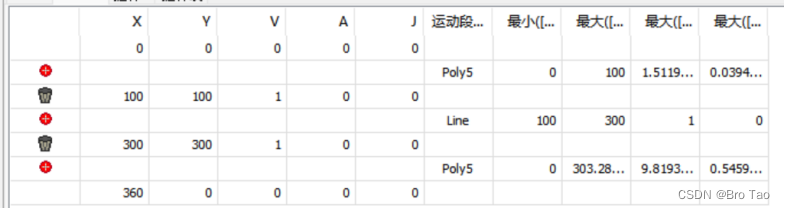
上图中,工具栏中①为Cam表,红色+号可添加一个点位,X为主轴位置,Y为从轴位置,poly5为曲线,双击poly5可调节成line,line为直线不代表同步运行,只是中间速度加速度变化基本都给砍掉了。
为实现零速等待-->加速-->同步运行-->减速-->高速返回-->零速等待的周期性,这个是追剪的曲线,飞剪的不一样,其实也就是调整CAM表的关键点罢了

故调节Cam表X、Y、运动段类型,其中红色+下的灰色垃圾桶为删除。
添加挺杆,在120开启,240关闭。
- 点击右侧工具箱-->点击添加挺杆,在120下方区域,再次点击添加挺杆在240区域。
- 为挺杆ID

挺杆TRUE和FALSE四个角可单击,单击一次添加方向/删除方向,再单击一次删除方向/添加方向。将其调节成下图,挺杆表可修改其坐标值。
挺杆的作用是主轴从正反经过一个点时可以输出一个开关量信号,该信号输出取决于挺杆设置的设置值,例如我这边设置120左右正向打开,反向不动作,240左右正向通过关闭,反向通过无动作,则主轴从0转到360度时,挺杆值会先置位,再复位,而如果主轴反向运行,从360度转到0度,反向动作是没有挺杆值输出的






2.建立虚拟主从轴
点击选中SoftMotion General Axis Pool,鼠标右键单击添加设备。

1:选中该虚拟轴驱动
2:将名字命名为AXIS_MASTER(自定义命名,觉得好用就行)
3:添加到工程中
添加从轴重复以上操作,命名为AXIS_SLASE。

创建好如下

后面介绍程序块编写















 365
365











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









