







目录
一、WIFI模块(ESP-01S)
1、关于模块的基本信息
ESP-01s其核心处理器是ESP8266,该系列是安信可科技有限公司开发的一系列基于乐鑫ESP8266的低功耗UART-WIFI芯片模组,可以方便地进行二次开发,接入云端服务,实现手机3/4G全球随时随地的控制,加速产品原型设计。
✒️ESP8266 系列模组出厂使用的 AT 固件,默认波特率为 115200
✒️ESP-01s工作AP(路由)模式下,默认的端口为333
✒️可查询模块的MAC地址到安信可官网查询真伪。
2、AT指令
1)了解概念
✒️终端设备(或数据终端设备)发送到终端适配器(或数据电路终端设备)
✒️除AT两个字符,最多可以接收1056个字符(含最后的空字符)
✒️每个AT命令行只能有一条AT指令,响应的终端也只允许一个(一对一)
✒️指令以回车结尾,响应以回车换行结尾(区分大小写)
2)ESP-01S的常用AT指令
| 指令 | 作用 | ESP-01S响应 |
| AT+RST | 重启模块 | ready |
| AT+UART=9600,8,1,0,0 | 配置串口 | OK/ERROR |
| AT+CWMODE | =1 设备(station)模式 | OK/ERROR |
| =2 路由(AP)模式 | OK/ERROR | |
| =3 双模 | OK/ERROR | |
| AT+CWJAP=”wifi名”,”密码” | 设备模式下连接WiFi | WIFI CONNECTED/FAIL WIFI GOT IP |
| AT+CIFSR | 查询获取到的IP信息 | IP信息 |
| AT+CIPSTART=”TCP”,”client ip”,port | 连接服务器 | OK |
| AT+CIPMODE=1 AT+CIPSEND | 开启透传模式数据传输 (退出发送+++) | OK/ERROR |
| AT+CIPMUX=1 | 多连接(AP模式下) | OK/ERROR |
| AT+CIPSEND=通道,字节数 | 发送数据 | SEND OK |
| AT+CIPSERVER=1 | TCP连接,默认端口333 | OK/ERROR |
3、编程实现
1)将ESP-01S配置成客户端Client
#include "reg52.h"
#include <intrins.h>
#include <string.h>
#define MAXSIZE 12
sfr AUXR = 0x8E;
sbit led1 = P3^6;
sbit led2 = P3^7;
char cmd[MAXSIZE];
void uartInit(void){
AUXR = 0x01;
SCON |= 0x01<<6;
SCON &= ~(0x01<<7);
TMOD |= 0x01<<5;
TMOD &= ~(0x01<<4);
TR1 = 1;
TH1 = 0xFD;
TL1 = 0xFD;
REN = 1;
EA = 1;
ES = 1;
}
/*********AT指令********/
code char WIFI_Connect[] = "AT+CWJAP=\"wifi_name\",\"wifi_password\"\r\n"; //连接WIFI
char Server_Connect[] = "AT+CIPSTART=\"TCP\",\"172.17.52.195\",8888\r\n"; //连接服务器
char Tou_Chuang[] = "AT+CIPMODE=1\r\n"; //透传模式
char Data_Transmit[] = "AT+CIPSEND\r\n"; //数据开始传输
/*****指令响应标志位********/
int ready_flag = 0; //模块上电启动完成标志位
int respond_ok_flag = 0;
int wifi_connect_flag = 0;
/*******发送指令函数*******/
void send_ATCMD(char *cmd){
while(*cmd != '\0'){
SBUF = *cmd;
while(!TI);
TI = 0;
cmd++;
}
}
/*****软件延时1s(心跳包用)*********/
void Delay1000ms(){
unsigned char i, j, k;
_nop_();
i = 8;
j = 1;
k = 243;
do{
do{
while (--k);
} while (--j);
} while (--i);
}
/*****软件延时150ms(闪烁灯用)*******/
void Delay150ms(){
unsigned char i, j, k;
_nop_();
i = 2;
j = 13;
k = 237;
do{
do{
while (--k);
} while (--j);
} while (--i);
}
/**********指示灯**********/
void ledBlink(int num,int cnt){ //cnt:闪烁次数
int i; //num:1 or 2
led1 = 1;
led2 = 1;
for(i=0;i<=cnt;i++){
if(num == 1){
led2 = 1;
led1 = ~led1;
}else{
led1 = 1;
led2 = ~led2;
}
Delay150ms();
}
}
void main(void){
uartInit(); //串口初始化
/*****等待模块上电初始化完成后连接WIFI,响应ready****/
while(!ready_flag);
send_ATCMD("AT\r\n"); //发送AT确认模块已经启动再发送连接wifi指令
while(!respond_ok_flag);
respond_ok_flag = 0;
send_ATCMD(WIFI_Connect);
ledBlink(1,8);
/*****等待WIFI连接完成后连接服务器,响应WIFI GOT IP、OK***/
while(!wifi_connect_flag);
while(!respond_ok_flag);
respond_ok_flag = 0;
send_ATCMD(Server_Connect);
ledBlink(2,8);
/****等待连接服务器成功后开启透传模式,响应OK*****/
while(!respond_ok_flag);
respond_ok_flag = 0;
send_ATCMD(Tou_Chuang);
ledBlink(1,8);
/****等待透传模式开启后发送传输数据指令,响应OK****/
while(!respond_ok_flag);
respond_ok_flag = 0;
send_ATCMD(Data_Transmit);
ledBlink(2,8);
/****每隔1s发送心跳包到服务器*****/
while(1){
send_ATCMD("I am alive!\r\n");
Delay1000ms();
led2 = 1;
}
}
/*******串口中断处理**************/
/*******处理模块响应**************/
void interruptHandle() interrupt 4{
static char tmp; //静态变量,只初始化1次
static char i;
if(RI){
RI = 0; //接收中断位软件清0
tmp = SBUF;
/********过滤出响应的首个关键字符,将其置于数组首位置**********/
if(tmp == 'r'||tmp == 'W' || tmp == 'O'){
i = 0;
}
cmd[i++] = tmp; //放置响应的关键词:ready、WIFI GOT IP、OK
/***********捕捉响应ready******************/
if(cmd[0] == 'r' && cmd[4] == 'y'){
ready_flag = 1;
memset(cmd,'\0',sizeof(cmd));
}
/***********捕捉响应WIFI GOT IP**************/
if(cmd[0] == 'W' && cmd[5] == 'G'){
wifi_connect_flag = 1;
memset(cmd,'\0',sizeof(cmd));
}
/***********捕捉响应OK******************/
if(cmd[0] == 'O' && cmd[1] == 'K'){
respond_ok_flag = 1;
memset(cmd,'\0',sizeof(cmd));
}
/*********判断数组越界********/
if(i == MAXSIZE) i = 0;
}
}
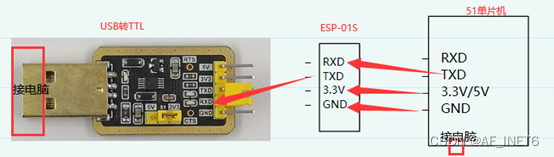
📓如何调试该程序?—白盒测试
如果单片机和ESP-01S直接交互数据,我们无法清楚看到和判断程序运行状况,很难进行调试。所以,我们需要先通过将单片机发送的指令传到电脑,再由我们手动通过电脑发送给ESP-01S,同样,ESP-01S响应的数据先传给电脑,以便我们观察调试代码。具体需要以下接线:
2)将ESP-01S配置成服务器Server
#include "reg52.h"
#include <intrins.h>
#include <string.h>
#define MAXSIZE 12
sfr AUXR = 0x8E;
sbit led1 = P3^6;
sbit led2 = P3^7;
char cmd[MAXSIZE];
/*******串口初始化******/
void uartInit(void){
AUXR = 0x01;
SCON |= 0x01<<6;
SCON &= ~(0x01<<7);
TMOD |= 0x01<<5;
TMOD &= ~(0x01<<4);
TR1 = 1;
TH1 = 0xFD;
TL1 = 0xFD;
REN = 1;
EA = 1;
ES = 1;
}
/*********AT指令********/
char AP_MODE[] = "AT+CWMODE=2\r\n"; //路由模式
char MUL_CONNECT[] = "AT+CIPMUX=1\r\n"; //多连接模式
char TCP_SERVER[] = "AT+CIPSERVER=1\r\n"; //TCP服务器
char DATA_TRANSMIT[] = "AT+CIPSEND=0,12\r\n"; //
/*****指令响应标志位********/
int ready_flag = 0; //模块上电启动完成标志位
int respond_ok_flag = 0; //模块响应OK标志位
int client_connect_flag = 0; //客服端接入标志位
/*******发送指令函数*******/
void sendCommand(char *cmd){
while(*cmd != '\0'){
SBUF = *cmd;
while(!TI);
TI = 0;
cmd++;
}
}
/*****软件延时1s(心跳包用)*********/
void Delay1000ms(){
unsigned char i, j, k;
_nop_();
i = 8;
j = 1;
k = 243;
do{
do{
while (--k);
} while (--j);
} while (--i);
}
/*****软件延时150ms(闪烁灯用)*******/
void Delay150ms(){
unsigned char i, j, k;
_nop_();
i = 2;
j = 13;
k = 237;
do{
do{
while (--k);
} while (--j);
} while (--i);
}
/**********LED闪烁**********/
void ledBlink(int num,int cnt){ //cnt:闪烁次数
int i; //num:1 or 2
led1 = 1;
led2 = 1;
for(i=0;i<=cnt;i++){
if(num == 1){
led2 = 1;
led1 = ~led1;
}
if(num == 2){
led1 = 1;
led2 = ~led2;
}
Delay150ms();
}
}
void main(void){
uartInit(); //串口初始化
/********配置成AP模式*********/
while(!ready_flag);
sendCommand("AT\r\n");
while(!respond_ok_flag);
respond_ok_flag = 0;
sendCommand(AP_MODE);
/********使能多连接***********/
while(!respond_ok_flag);
respond_ok_flag = 0;
sendCommand(MUL_CONNECT);
/******** TCP服务器 ***********/
while(!respond_ok_flag);
respond_ok_flag = 0;
sendCommand(TCP_SERVER);
/****每隔1秒ESP_01S给客户端发送心跳包*****/
while(!respond_ok_flag);
respond_ok_flag = 0;
while(!client_connect_flag);
client_connect_flag = 0;
while(1){
sendCommand(DATA_TRANSMIT);
Delay1000ms();
sendCommand("I am alive\r\n");
Delay1000ms();
}
}
/*******串口中断处理**************/
/*******处理模块响应**************/
void interruptHandle() interrupt 4{
static char tmp; //静态变量,只初始化1次
static char i;
if(RI){
RI = 0; //接收中断位软件清0
tmp = SBUF;
/********过滤出响应的首个关键字符,将其置于数组首位置**********/
if(tmp == 'r'||tmp == 'O' || tmp == ',' || tmp == ':'){
i = 0;
}
cmd[i++] = tmp; //放置响应的关键词:ready、OK
/***********捕捉响应ready******************/
if(cmd[0] == 'r' && cmd[4] == 'y'){
ready_flag = 1;
memset(cmd,'\0',sizeof(cmd));
}
/***********捕捉响应OK******************/
if(cmd[0] == 'O' && cmd[1] == 'K'){
respond_ok_flag = 1;
memset(cmd,'\0',sizeof(cmd));
}
/****捕获客户端接入响应:0,CONNECT***/
if(cmd[0] == ',' && cmd[1] == 'C'){
client_connect_flag = 1;
if(client_connect_flag){ //每次有客户端接入时led2闪烁8次后熄灭
ledBlink(2,8);
led2 = 1;
}
memset(cmd,'\0',sizeof(cmd));
}
/****处理客服端发送过来的数据*******/
if(cmd[0] == ':' && cmd[1] == 'o' && cmd[2] == 'p'){
ledBlink(1,8);
memset(cmd,'\0',sizeof(cmd));
}
if(cmd[0] == ':' && cmd[1] == 'c' && cmd[2] == 'l'){
led1 = 1;
memset(cmd,'\0',sizeof(cmd));
}
/*********判断数组越界********/
if(i > MAXSIZE){
i = 0;
}
}
}
二、4G无线通讯模块(EC03-DNC)
1、关于模块的基本信息
EC03-DNC是亿佰特公司推出的 LTE CAT1 数传模块产品, 该产品软件功能完善, 覆盖绝大多数常规应用场景, EC03-DNC 是为实现串口设备与网络服务,通过网络相互传输数据而开发的产品 , 该产品是一款带分集接收功能 的LTE-FDD/LTE-TDD 无线通信数传模块, 支持 LTE-FDD , LTE-TDD 网络数据连接, 用户只需通过简单的设置, 即可实现串口到网络服务器的双向数据透明传输。
✒️基于串口AT指令的开发方式
✒️有两种工作模式,默认是透传模式,通过其他方式进入AT指令模式
✒️模块正常工作状态,红灯常亮,黄灯闪烁(SIM卡)
✒️默认出厂波特率115200
✒️进入AT指令模式:发送+++(不换行)后3秒内发送任意AT指令(换行)
2、EC01-DNC的常用AT指令
| 配置步骤 | 指令 | 作用 | 成功-模块响应 |
| (1)使用前查看 | AT+CREG | 查询是否注册到网络 | +OK=1 |
| AT+CPIN | 查询SIM状态 | +OK=1 | |
| AT+ICCID | 查询SIM信息 | +OK=SIM卡卡号 | |
| AT+CSQ | 查询信号值 | +OK=信号值 | |
| (2)模块基本配置 | AT+UART=9600,NONE | 查询/设置串口参数 | +OK |
| AT+HEARTMOD AT+HEARTMOD=NET/UART | 查询/设置心跳包模式 | +OK=NET(网络心跳) +OK=UART(串口心跳) | |
| AT+HEARTINFO AT+HEARTINFO=<内容> | 查询/设置心跳包内容 | +OK=<内容> | |
| AT+HEARTM AT+HEARTM=<time> | 查询/设置心跳包时间 | +OK=<time> | |
| (3)退出AT模式 进入透传模式 | AT+EXAT | 退出AT模式 | +OK |
| (4)连接服务器 | AT+SOCK=TCPC,IP,PORT | 连接socket服务器 | +OK |
| AT+LINKSTA | 查询连接状态 | +OK=Connect | |
| 注:这里只列出下面的demo所需要的配置指令 | |||
3、花生壳内网穿透
前面通过ESP-01S模块实现客户端接入点亮LED灯,主要是在同一局域网内(内网)实现的。而4G模块可以实现公网(外网)服务器的访问,这里通过花生壳软件将内部的TCP服务器地址(例如:192.168.136.1:8888)映射到公网(例如:103.46.128.53:50014),再通过4G模块访问花生壳映射的公网地址(103.46.128.53:50014)从而接入内网的TCP服务器。
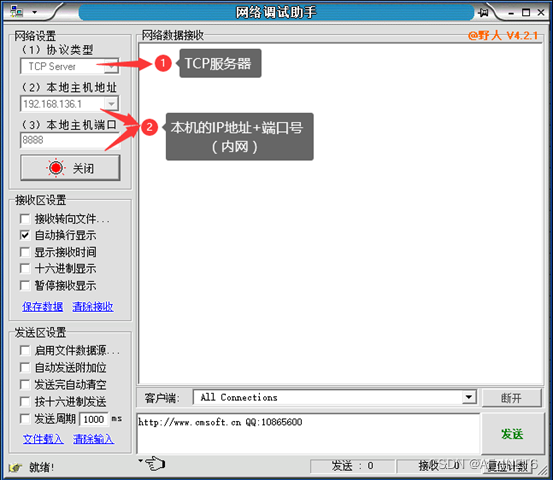
(使用内网搭建起TCP服务器)

(花生壳软件内网穿透)

(内网穿透成功后,获得对应的公网IP和端口号)
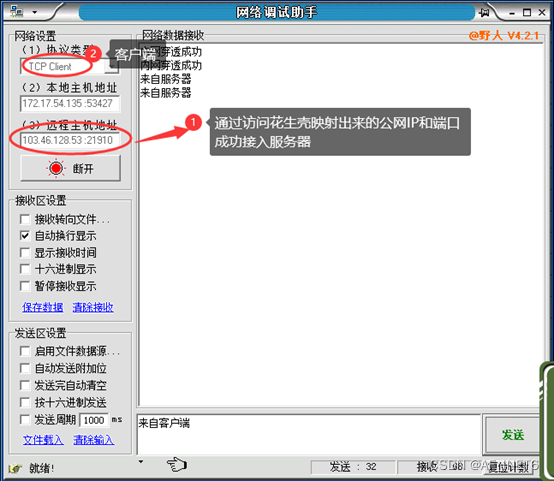
(验证服务器)
✒️接下来要做到就是让EC03-DNC模块访问花生壳映射出来的公网地址(例如:103.46.54.106:21910),从而连接上TCP服务器,并通过服务器传过来的指令控制单片机的LED。首先配置好EC03-DNC(修改波特率、心跳包、连接TCP服务器—通过公网,配置完成后模块重启会自动连接),最后再实现控制单片机LED。
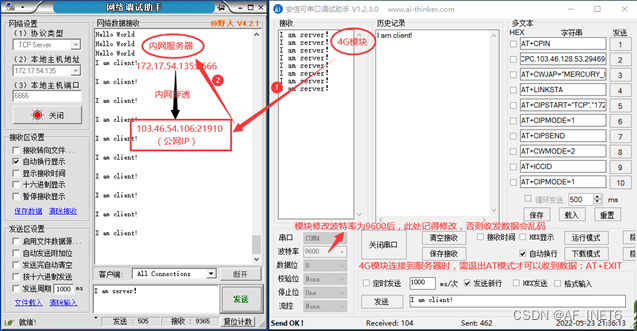
(4G模块接入服务器)
4、编程实现
#include "reg52.h"
#include <intrins.h>
#include <string.h>
#define MAXSIZE 12
sfr AUXR = 0x8E;
sbit led1 = P3^6;
sbit led2 = P3^7;
char cmd[MAXSIZE];
void uartInit(void){
AUXR = 0x01;
SCON |= 0x01<<6;
SCON &= ~(0x01<<7);
TMOD |= 0x01<<5;
TMOD &= ~(0x01<<4);
TR1 = 1;
TH1 = 0xFD;
TL1 = 0xFD;
REN = 1;
EA = 1;
ES = 1;
}
/*****软件延时150ms(闪烁灯用)*******/
void Delay150ms(){
unsigned char i, j, k;
_nop_();
i = 2;
j = 13;
k = 237;
do{
do{
while (--k);
} while (--j);
} while (--i);
}
/**********指示灯**********/
void ledBlink(int num,int cnt){ //cnt:闪烁次数
int i; //num:1 or 2
led1 = 1;
led2 = 1;
for(i=0;i<=cnt;i++){
if(num == 1){
led2 = 1;
led1 = ~led1;
}else{
led1 = 1;
led2 = ~led2;
}
Delay150ms();
}
}
void main(void){
uartInit(); //串口初始化
while(1);
}
/**Led1 blink**/
/**Led2 blink**/
/*******串口中断处理**************/
void interruptHandle() interrupt 4{
static char tmp; //静态变量,只初始化1次
static char i;
if(RI){
RI = 0; //接收中断位软件清0
tmp = SBUF;
/********过滤出响应的首个关键字符,将其置于数组首位置**********/
if(tmp == 'L'){
i = 0;
}
cmd[i++] = tmp;
if(cmd[0] == 'L' && cmd[3] == '1'){
ledBlink(1,8);
led1 = 1;
memset(cmd,'\0',sizeof(cmd));
}
if(cmd[0] == 'L' && cmd[3] == '2'){
ledBlink(2,8);
led2 = 1;
memset(cmd,'\0',sizeof(cmd));
}
/*********判断数组越界********/
if(i > MAXSIZE){
i = 0;
}
}
}
(配置好模块后,通过修改上篇wifi模块代码,即可实现网络点灯)
三、总结
对于51来讲,ESP-01S(wifi模块)和EC01-DNC(4G模块)都是基于单片机串口通讯,都是串口设备与网络服务器为了实现相互传输数据而开发的产品。但是wifi模块和4G模块应用场景不同,wifi模块主要与接入同一局域网的服务器或者客户端通讯,而4G模块可以实现对公网服务器的访问。
说明:由于笔者水平有限,文中不可避免有所错漏,敬请读者斧正
















 2825
2825











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











