






文章目录
一、安装NVIDIA驱动
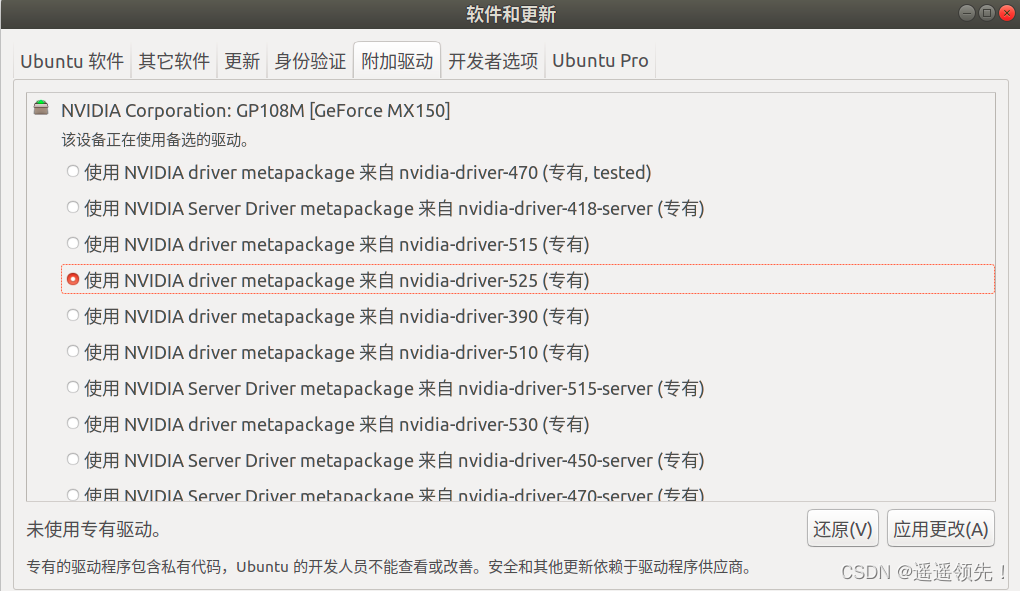
(1)打开软件与更新,在“附加驱动”更改驱动,这里选择的是nvidia-driver-525
 (2)应用加载完成后,重启系统输入:
(2)应用加载完成后,重启系统输入:
nvidia-smi
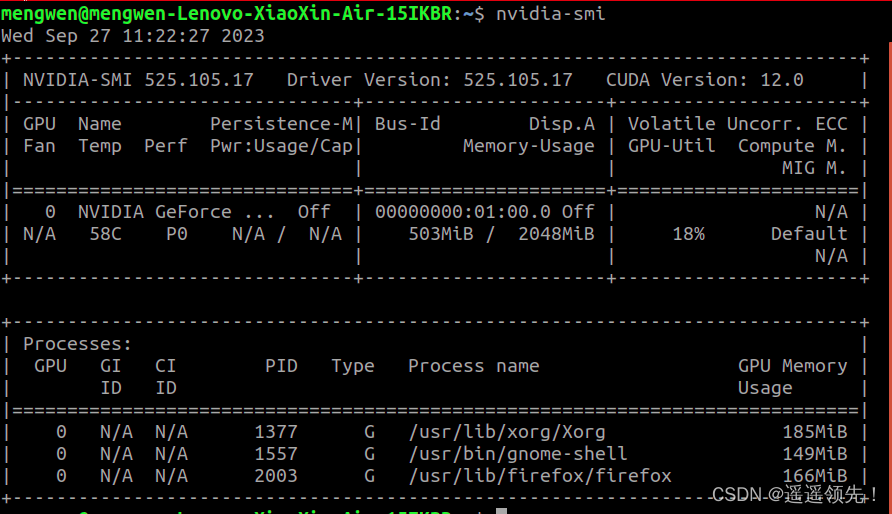 查看支持的CUDA最高版本为12.0,后文所选为11.8
查看支持的CUDA最高版本为12.0,后文所选为11.8
二、安装CUDA驱动
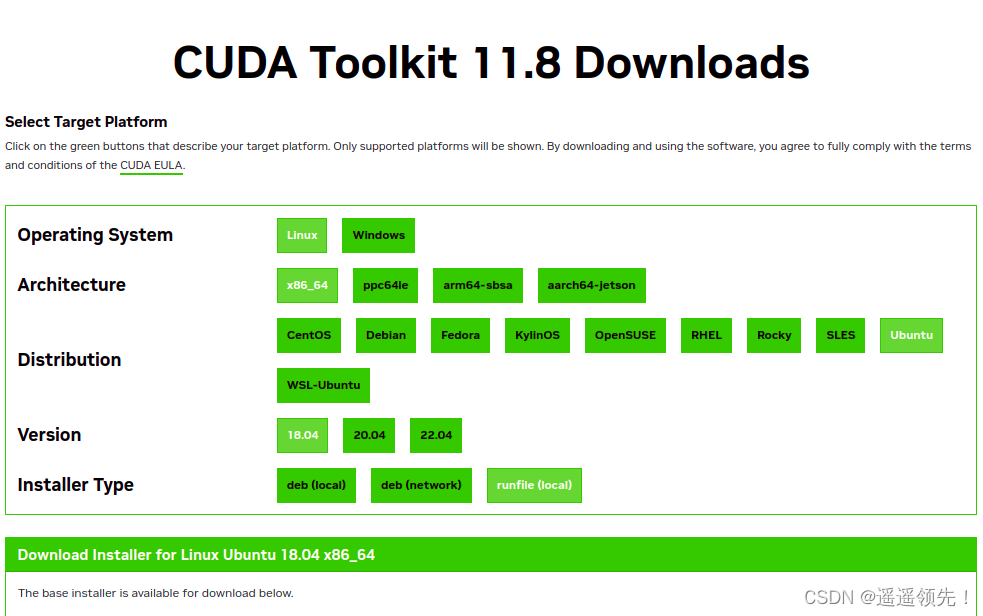
(1)下载地址:https://developer.nvidia.com/cuda-toolkit-archive,选择CUDA11.8
- 一般会按照高版本的驱动+低版本的CUDA+与CUDA对应的cudnn去配置环境。
wget https://developer.download.nvidia.com/compute/cuda/11.8.0/local_installers/cuda_11.8.0_520.61.05_linux.run
sudo sh cuda_11.8.0_520.61.05_linux.run
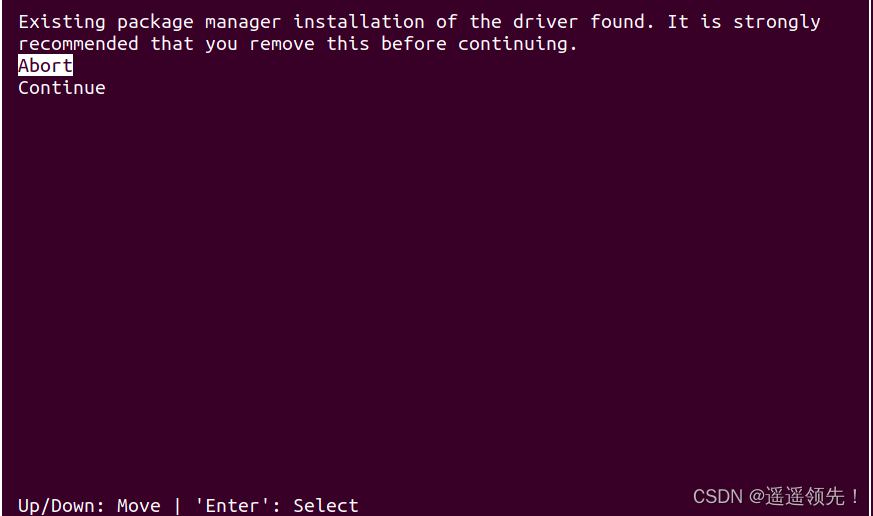
(2)选择Continue
(3)选accept
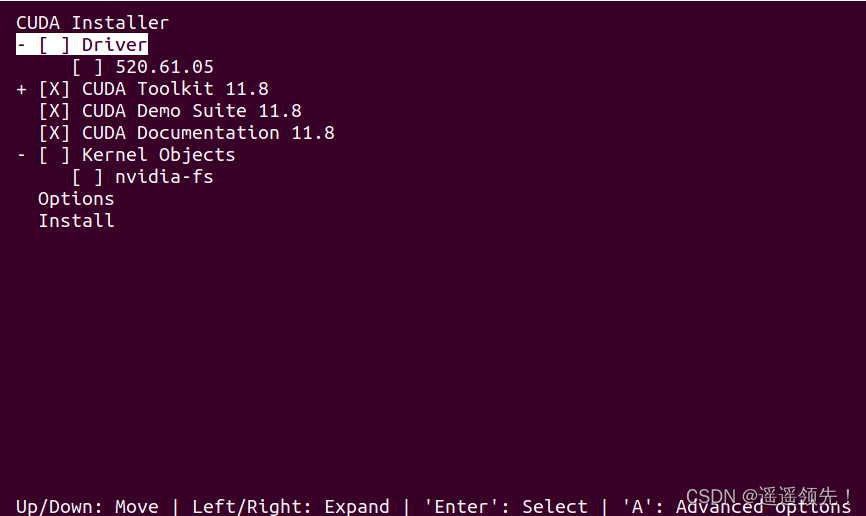
(4)按下“enter”将第一个安装选项取消,再点击install,即可完成安装
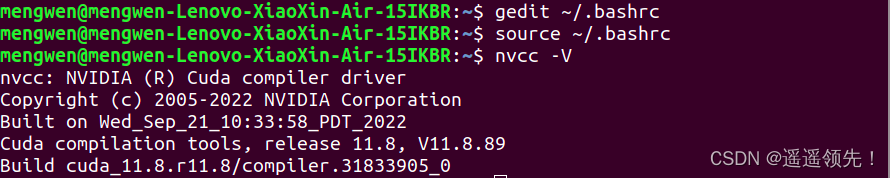
(5)设置环境变量
gedit ~/.bashrc
export PATH=/usr/local/cuda-11.8/bin${PATH:+:${PATH}}
export LD_LIBRARY_PATH=/usr/local/cuda-11.8/lib64${LD_LIBRARY_PATH:+:${LD_LIBRARY_PATH}}
source ~/.bashrc
nvcc -V
三、安装ZED SDK
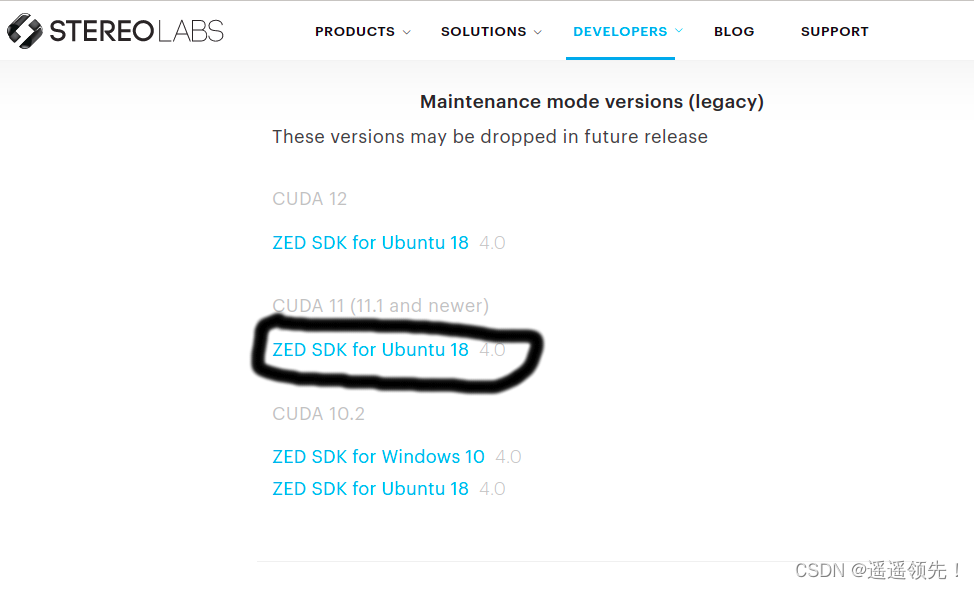
下载地址:https://www.stereolabs.com/developers/release/
(1)下载ZED_SDK_Ubuntu18_cuda11.8_v4.0.7.zstd.run文件
(2)安装程序
chmod +x ZED_SDK_Ubuntu18_cuda11.8_v4.0.7.zstd.run
./ZED_SDK_Ubuntu18_cuda11.8_v4.0.7.zstd.run
- 出现这种情况:
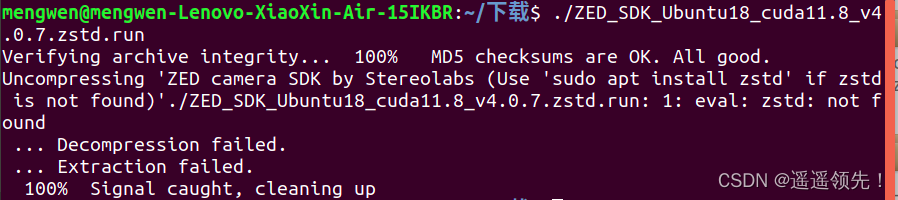
输入:
sudo aptitude install zstd
若出现sudo:aptitude:找不到命令
sudo apt install aptitude
再执行:
sudo aptitude install zstd
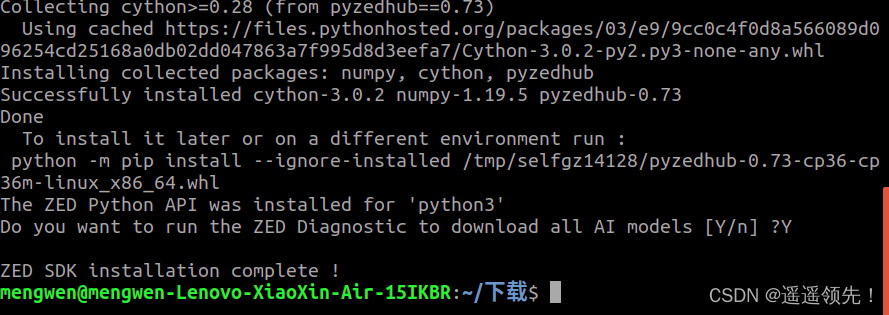
(3) 安装开始,显示软件许可证,按q继续
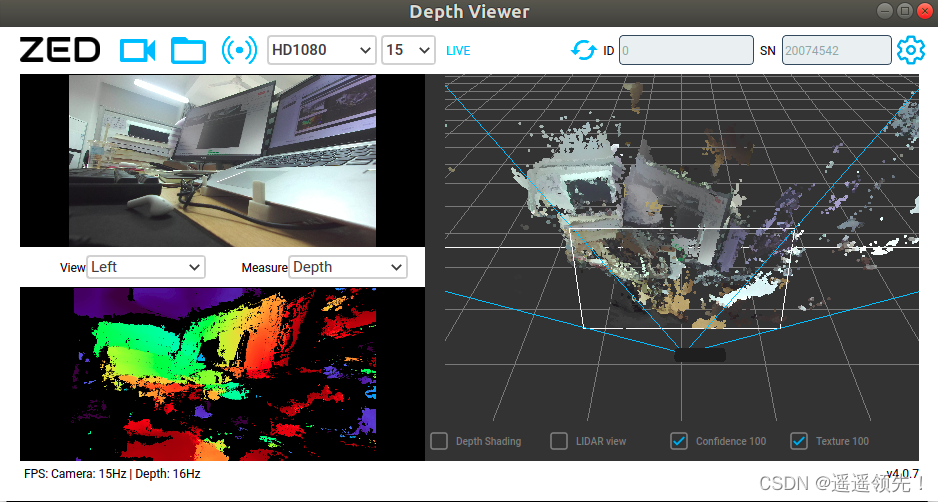
(4)验证图像, 观察深度数据是否正常
cd /usr/local/zed/tools
./ZED_Explorer

./ZED_Depth_Viewer
./ZED_Sensor_Viewer
 加速度计、陀螺仪、四元数、气压计、磁力计及温度等传感器信息
加速度计、陀螺仪、四元数、气压计、磁力计及温度等传感器信息
四、安装zed-ros-wrapper
(1)创建工作空间目录结构(在用ros运行ORB_SLAM2时已经创建好)
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
(2)克隆存储库,更新依赖项
git clone https://github.com/stereolabs/zed-ros-wrapper.git
cd ..
catkin_make
source ./devel/setup.bash
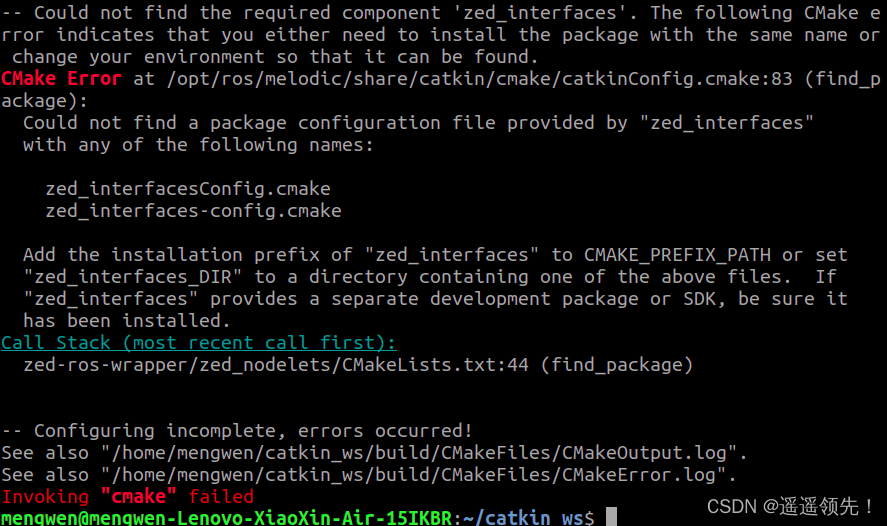
五、安装zed-ros-interfaces
cd ~/catkinn_ws/src
git clone https://github.com/stereolabs/zed-ros-interfaces.git
cd ..
catkin_make
source ./devel/setup.bash
六、安装zed-ros-examples
cd ~/catkin_ws/src
git clone https://github.com/stereolabs/zed-ros-examples.git
cd ..
catkin_make
source ./devel/setup.bash
七、ROS下运行ZED相机
roscore
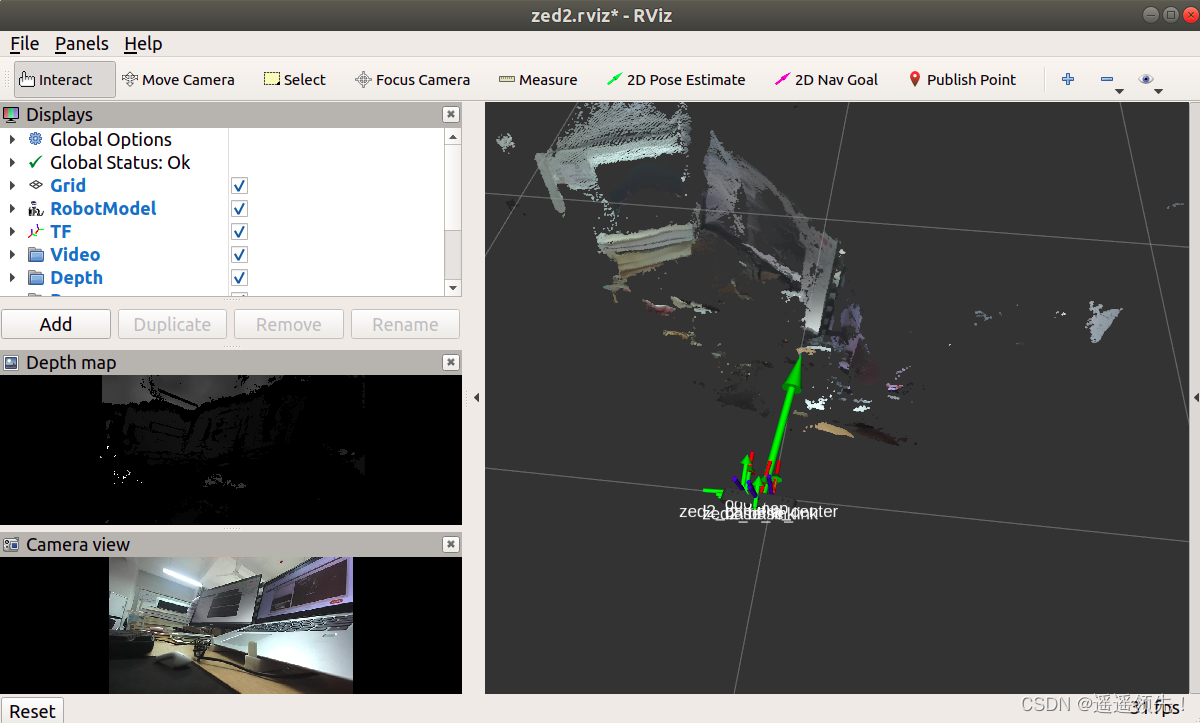
roslaunch zed_display_rviz display_zed2.launch
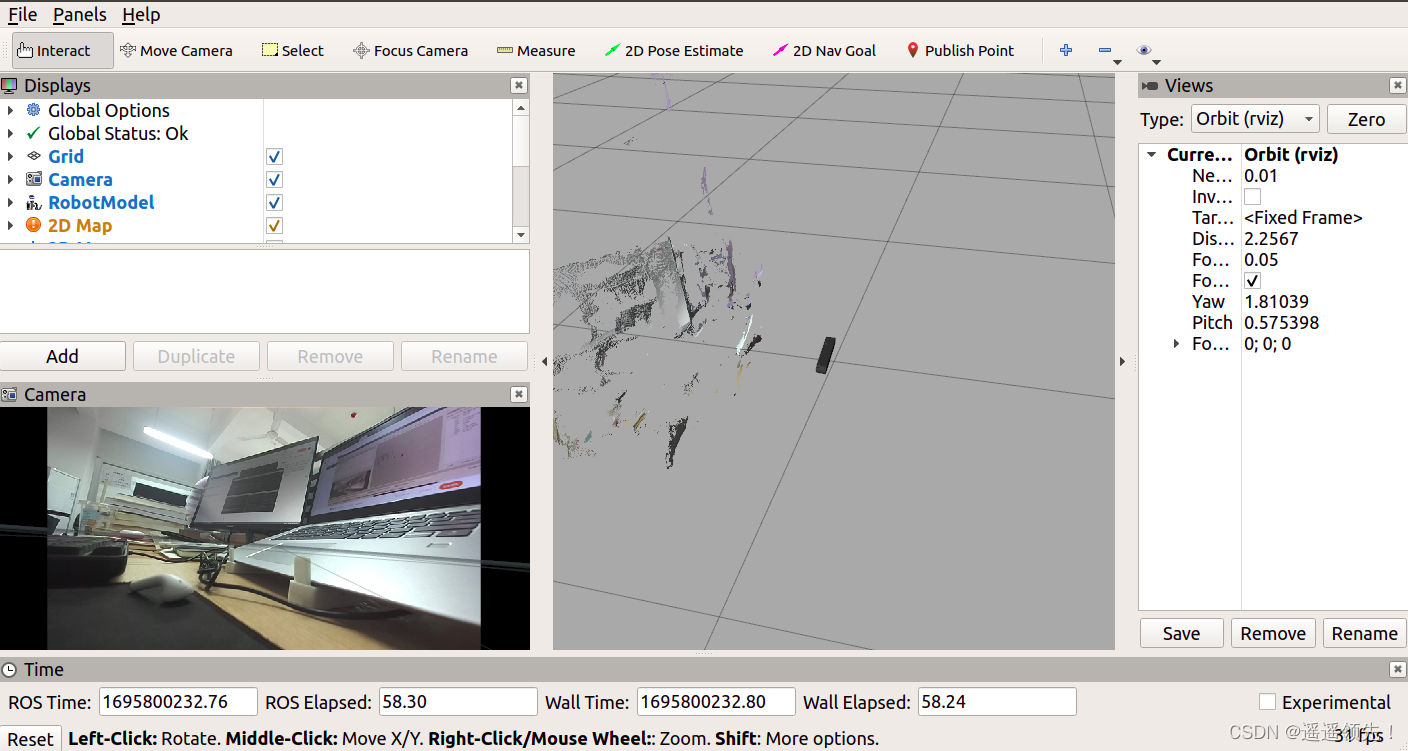
roslaunch zed_rtabmap_example zed_rtabmap.launch
八、ZED结合ORB_SLAM2在ROS下运行
(1)在~/catkin_ws/src/ORB_SLAM2/Examples/ROS/ORB_SLAM2/src路径下,修改ros_stereo.cc,将里面的订阅话题改为zed发布的话题:
message_filters::Subscriber<sensor_msgs::Image> left_sub(nh, "/zed/zed_node/left/image_rect_color", 1);
message_filters::Subscriber<sensor_msgs::Image> right_sub(nh,"/zed/zed_node/right/image_rect_color", 1);

(2)ros下编译ORB_SLAM2
cd ~catkin_ws/src/ORB_SLAM2
./build_ros.sh
详细过程见:ros环境下配置ORB_SLAM2运行环境
(3)运行ZED相机:
- 打开四个终端:
roscore
roslaunch zed_wrapper zed.launch
rqt_image_view #查看话题
rosrun ORB_SLAM2 Stereo /home/mengwen/catkin_ws/src/ORB_SLAM2/Vocabulary/ORBvoc.txt /home/mengwen/catkin_ws/src/ORB_SLAM2/Examples/Stereo/EuRoC.yaml false
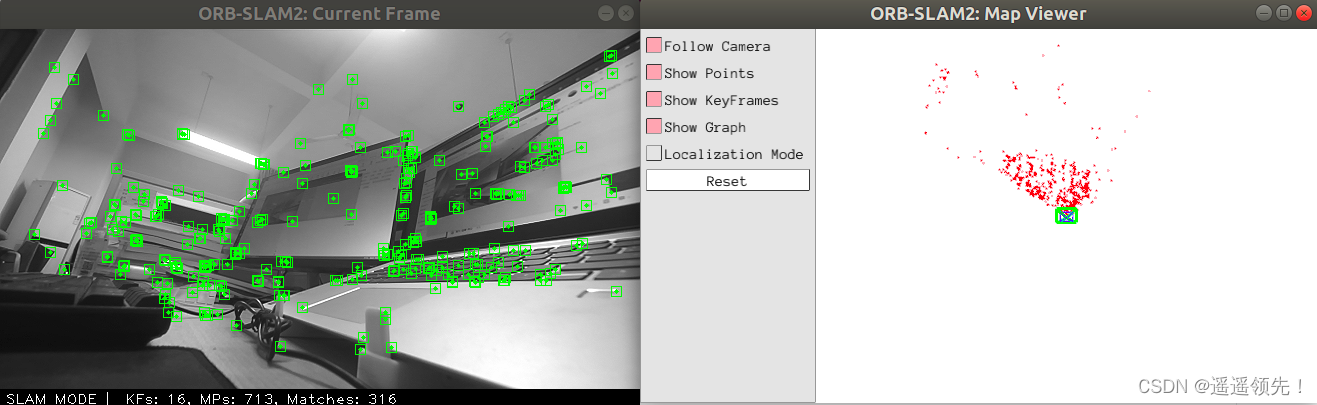 成功!
成功!
参考文献:
1、ubuntu18.04 安装orb_slam2并结合ZED运行
2、使用zed摄像头+ros kinetic跑ORB_SLAM2
3、ZED2相机SDK安装使用及ROS下使用
4、安装,nvdia驱动,uda11.6.2,zed相机SDK,ORB-SLAM2使用zed2运行双目
5、安装zed-ros-wrapper 并解决一些报错















 2004
2004











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









