







 本文详细介绍了陆基导航系统,包括塔康导航、伏尔导航和测距器的工作原理与特点。同时,深入探讨了卫星导航系统,如GPS和BDS的构成、信号体制与导航电文。此外,还提及了GPS接收机的组成和工作原理。
本文详细介绍了陆基导航系统,包括塔康导航、伏尔导航和测距器的工作原理与特点。同时,深入探讨了卫星导航系统,如GPS和BDS的构成、信号体制与导航电文。此外,还提及了GPS接收机的组成和工作原理。
无线电导航
要求
包括 精度、可用性和可靠性、覆盖范围、导航信息更新率、导航信息多值性、系统容量、系统完善性 和 导航信息的维度 等。
精度
预测精度、重复精度、相对精度。
预测精度(相对地图)、重复精度(相对以前自己)、相对精度(相对其他系统)。
陆基导航
定义
从一般意义上讲,可以把那些将导航设备(或媒介)置于陆地上、导航信号作用范围限于电离层以下的空间、陆地和海洋上的导航行为,统称为陆基导航。
塔康导航(TACAN)
范围
以地面设备为中心半径350~370km范围。
天线
结构设计
信标方向
为适应人们的习惯,塔康机载设备在信标的正南方接收时,飞机的方位指示器应指示0 ∘ ^{\circ } ∘;在正西、正北和正东接收时,指示应为90 ∘ ^{\circ } ∘,180 ∘ ^{\circ } ∘和270 ∘ ^{\circ } ∘。
速记:正南0 ∘ ^{\circ } ∘,顺时针加值。
塔康的信号天线如何设置?42页
伏尔导航(VOR)
定义
伏尔导航系统(VOR)是空中导航用的甚高频全向信标。
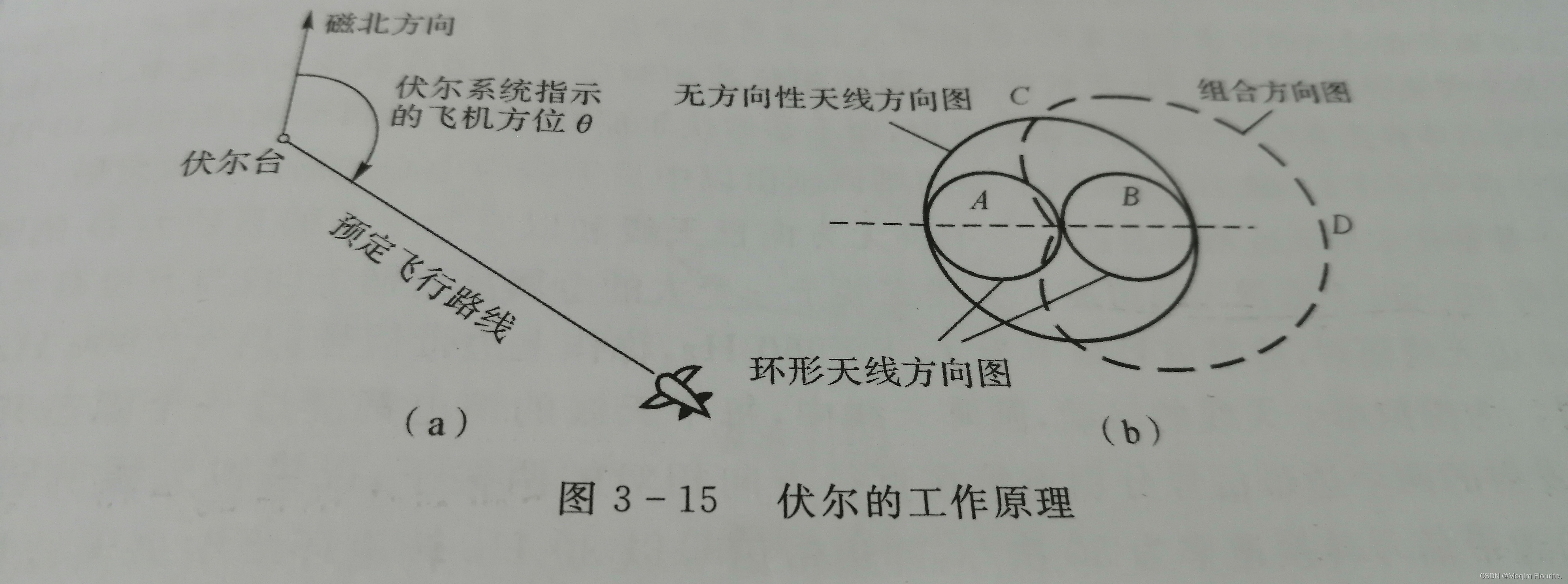
工作原理
通过比较两个30Hz信号的相位,来确定飞机对于伏尔台的方位。
伏尔是利用其地面台辐射场调制包络的相位与飞机方位角
θ
\theta
θ之间的一一对应关系为飞机提供角坐标</stron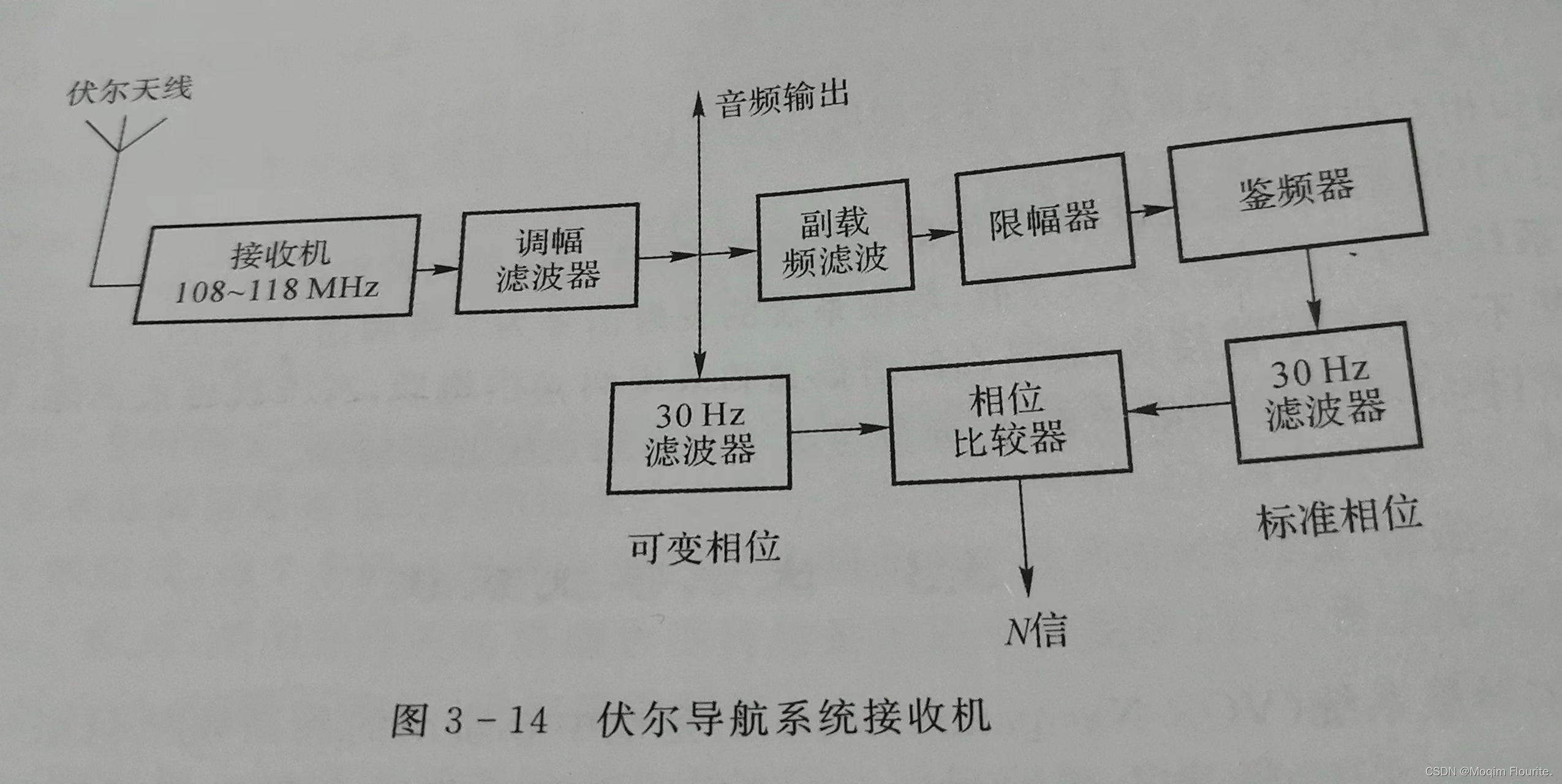
g>角坐标位置。
建设要求
对地形要求非常严格。周围100m范围内,地形凹凸不平不应超过 ± \pm ± 15cm。
拓展
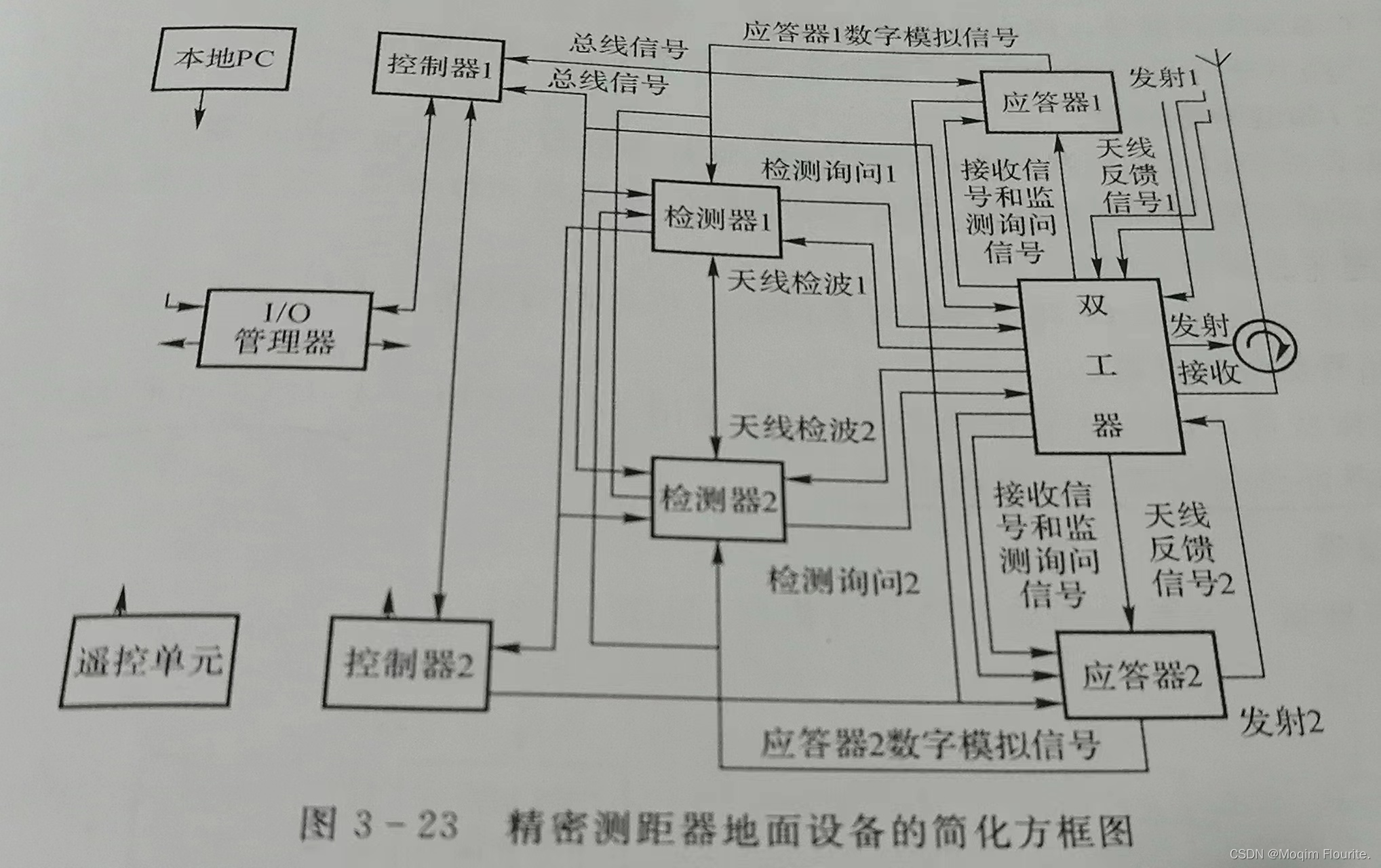
测距器(DME)
分类
分为测距器(DME/N)和精密测距器(DME/P)。
原理
是一种二次雷达测距系统。
测距系统的距离测定实际上是信号传播时间的测定。
公式: 距离 = 1 / 2 [ 光速 ∗ (发收时间间隔 − 固定延时) ] 距离=1/2[光速*(发收时间间隔-固定延时)] 距离=1/2[光速∗(发收时间间隔−固定延时)]
避免干扰
同一通道的询问频率与回答频率需隔开63MHz,以避免同频相加干扰。
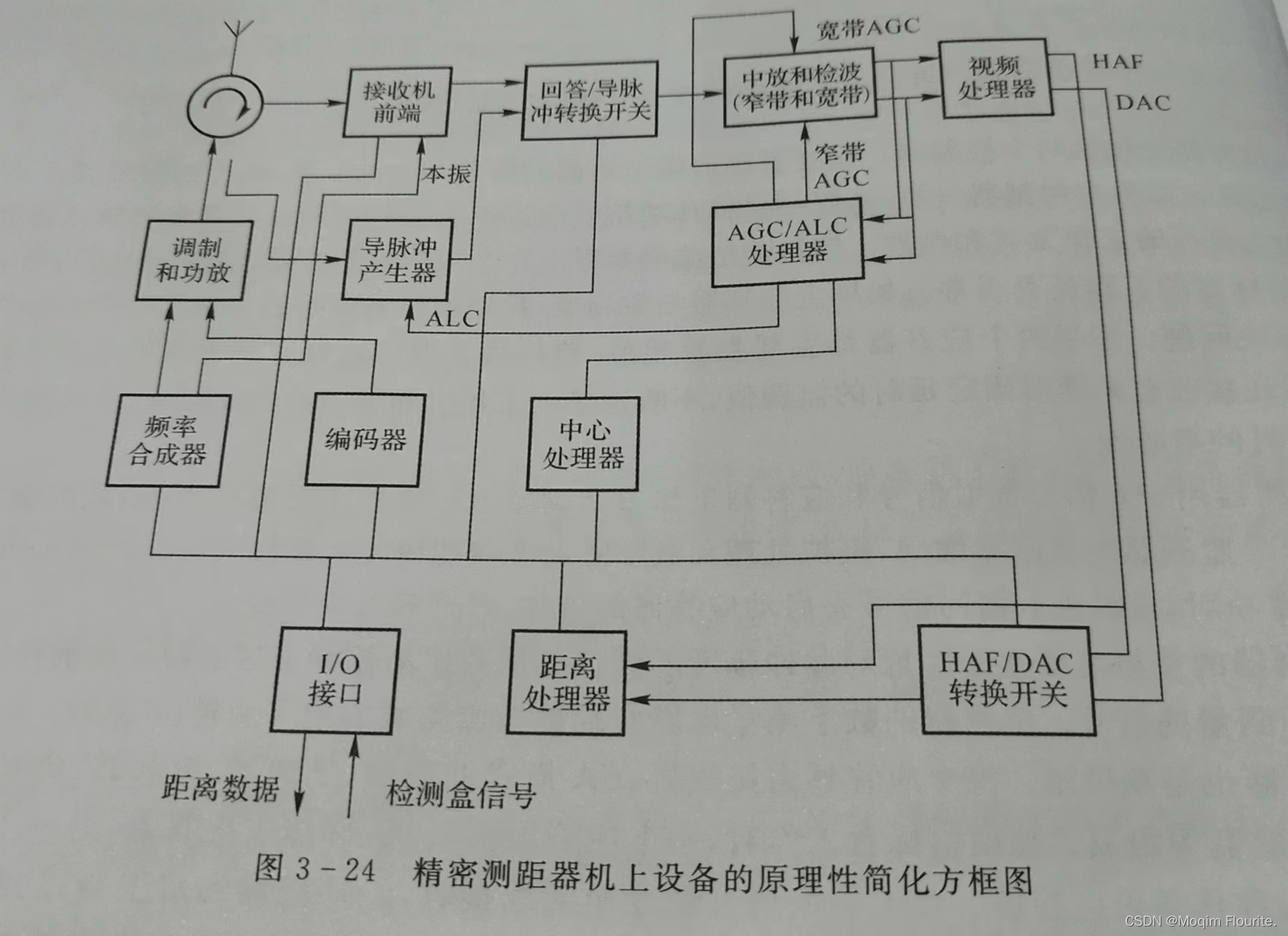
设备
由地面设备和机上设备组成。
地面设备
地面信标台由 I/O部分、控制部分、监测部分、应答器部分、双工器、环流器、天线和电源 组成。
机上设备
罗兰-C(Loran-C)
定义
罗兰-C系统是一种远程双曲线无线电导航系统,作用距离可达2 000km,工作频率为100kHz(低频中段).
又称为低频脉相双曲线导航系统。
结构
四大基本组成部分:地面设施,用户设备,传播媒介和应用方法。
由地面发射站的发射设备、同步检测与控制设备 和 用户接收设备 三大部分组成。
双曲线台链
组成数量
至少要有三个发射台才能组成一个双曲线台链,一个主台,其余做副台。
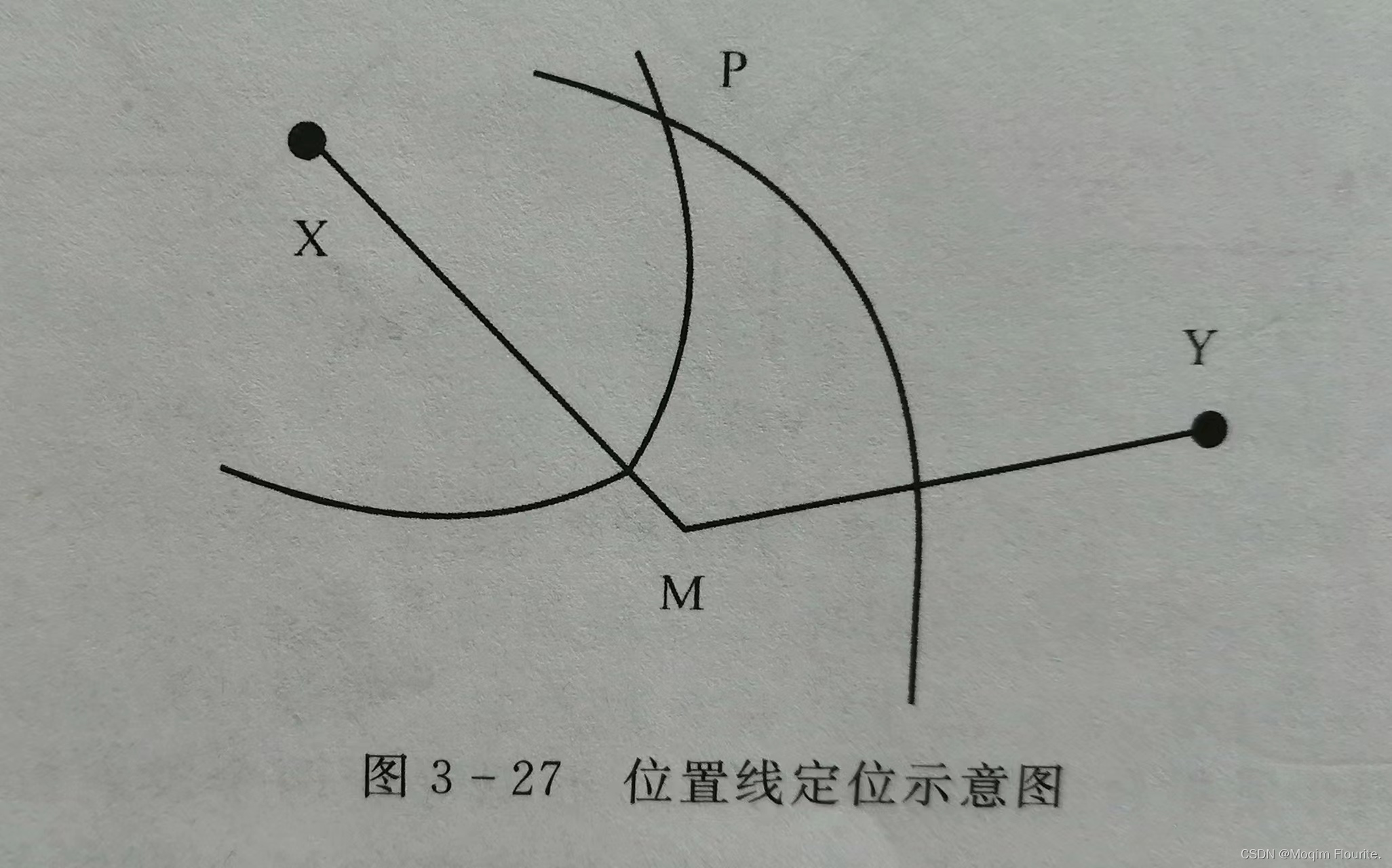
定位原理
在双曲线的两个焦点上配置无线电发射台,发射无线电信号,船上接收机接收后,根据信号的时间差或相位差,测出船舶与发射台之间的差距,由两组发射台,确定船位。
基本工作原理
在工作区内某点接收统一罗兰-C台链的两个发射台信号到达的时间差,利用电波传播速度稳定的原理,时间差可以转换成距离差。具有相同距离差的点的轨迹是以发射台为焦点的一条双曲线,如果能获得两条相交的双曲线,则其交点就是我们要确定的位置。
卫星导航
基本概念
定义
卫星导航是利用卫星播发的无线电信号进行导航定位的技术。
组成
由星座、地面控制系统、用户设备三部分组成。
各国卫星导航系统
GPS 美国;
GLONASS 苏联;
BDS 中国;
Galileo 欧盟。
导航算法
卡尔曼滤波、最小二乘法。
坐标系
天球坐标系
轨道六参数
半长轴 a、离心率 e、轨道倾角 i、近心点辐角 ω、升交点经度 Ω 和真近点角 φ
确定椭圆:a、e ;
确定轨道平面与地球相对位置:i、ω、Ω ;
确定卫星位置:φ。
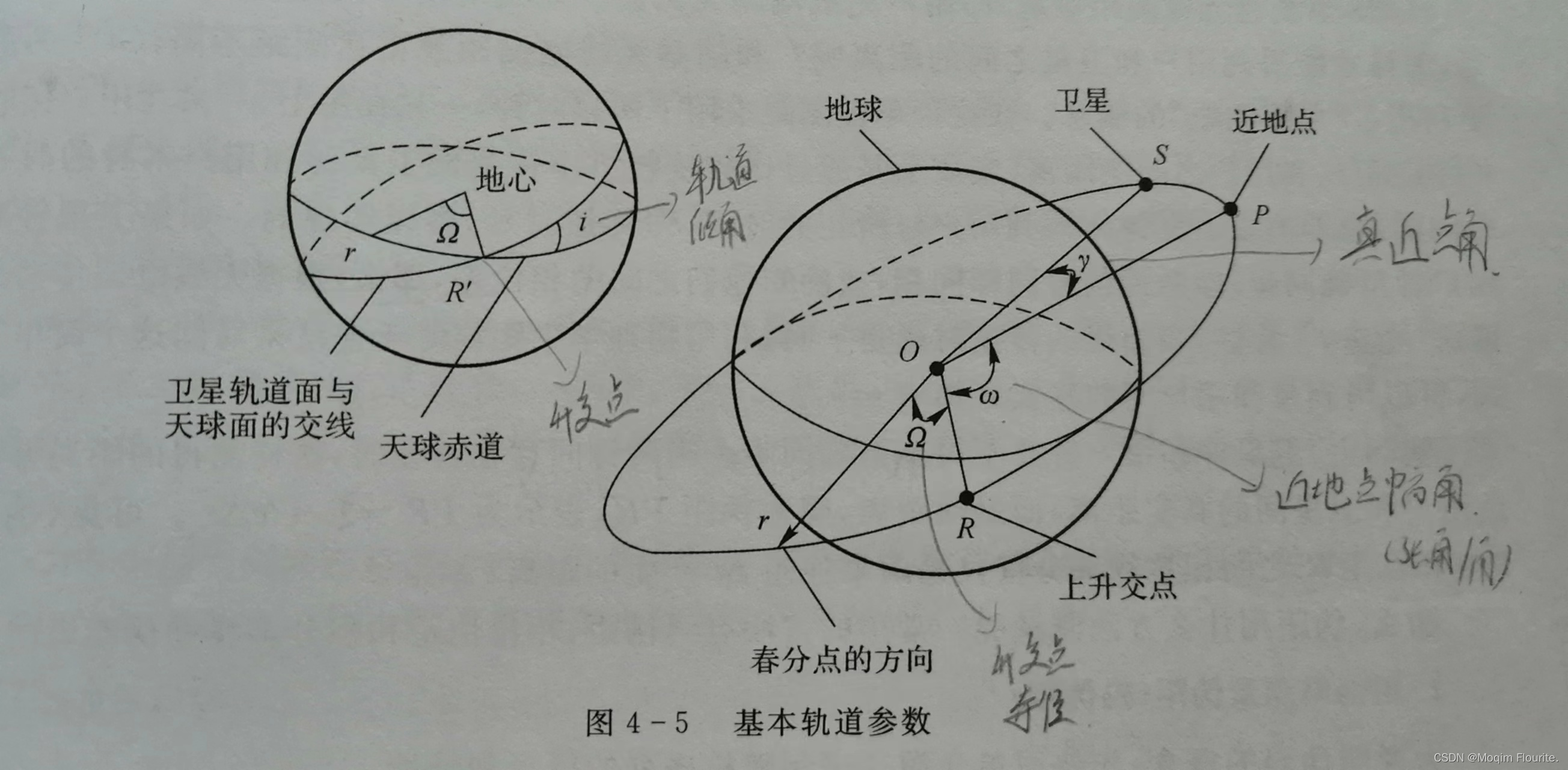
基本点、线、面
春\秋分点:天赤道与天黄道的交点;
地心:地球的中心;
天球赤道:地球赤道平面与天球相截所得的大圆,即天球赤道是地球赤道投影在太空的影像;
天球黄道:太阳在天球上的视运动轨迹,天球赤道目前与黄道的倾斜角度大约23.44°。
GPS
组成
GPS卫星是由24颗卫星组成的星座。
空间星座部分
空间部分包括由多颗卫星组成的星座。
在空间星座布满卫星以后,可在全天任何时间为全球任何地方提供4~8颗仰角在15°以上的同时可观测的卫星。
如果将遮蔽仰角降到10°,有时则最多可观测到10颗卫星;
若将遮蔽仰角进一步下降到5°,最多可同时观测到12颗卫星。
GPS星座由24颗工作卫星组成,均匀分布在6个倾角在55°的轨道面上,每个轨道有4颗卫星。
卫星类型(五种)
GPS卫星有五种类型,分别是:Block Ⅰ、Block Ⅱ,Block Ⅱ A,Block Ⅱ R和Block Ⅱ F型。
识别形式
所有卫星均有识别系统:发射序号、分配的伪码编号PRN、轨道位置编号、NASA产品编号和国际命名等。
为避免混乱,并保持与卫星导航电文的一致性,主要使用伪码编号PRN这种识别形式。
信号结构
卫星向用户广播的导航信号包括:
1)卫星星历及星钟校正参数;
2)测距时间标记;
3)大气附加延迟校正参数;
4)与导航有关的信息。
载波的双相调制
当码的状态发生改变时,载波相位发生180°相移。
GPS信号体制
GPS采用的是码分多址体制。(超链接)
在接收机中,不同伪码的产生便成为识别不同卫星的唯一依据。
GPS导航电文
内容及作用
卫星广播给用户的导航电文包括 卫星时钟信息、卫星轨道信息、卫星健康状况及各种校正数据,主要用来计算卫星位置和时间。
GPS系统时间
星钟同步
GPS系统各卫星钟的精准同步,是实现GPS系统定位、测速、授时、校频等功能的技术基础。
BDS
载波频率
采用了三种不同频率来发射卫星信号: L B 1 , L B 2 , L B 3 L_{B1},L_{B2},L_{B3} LB1,LB2,LB3.
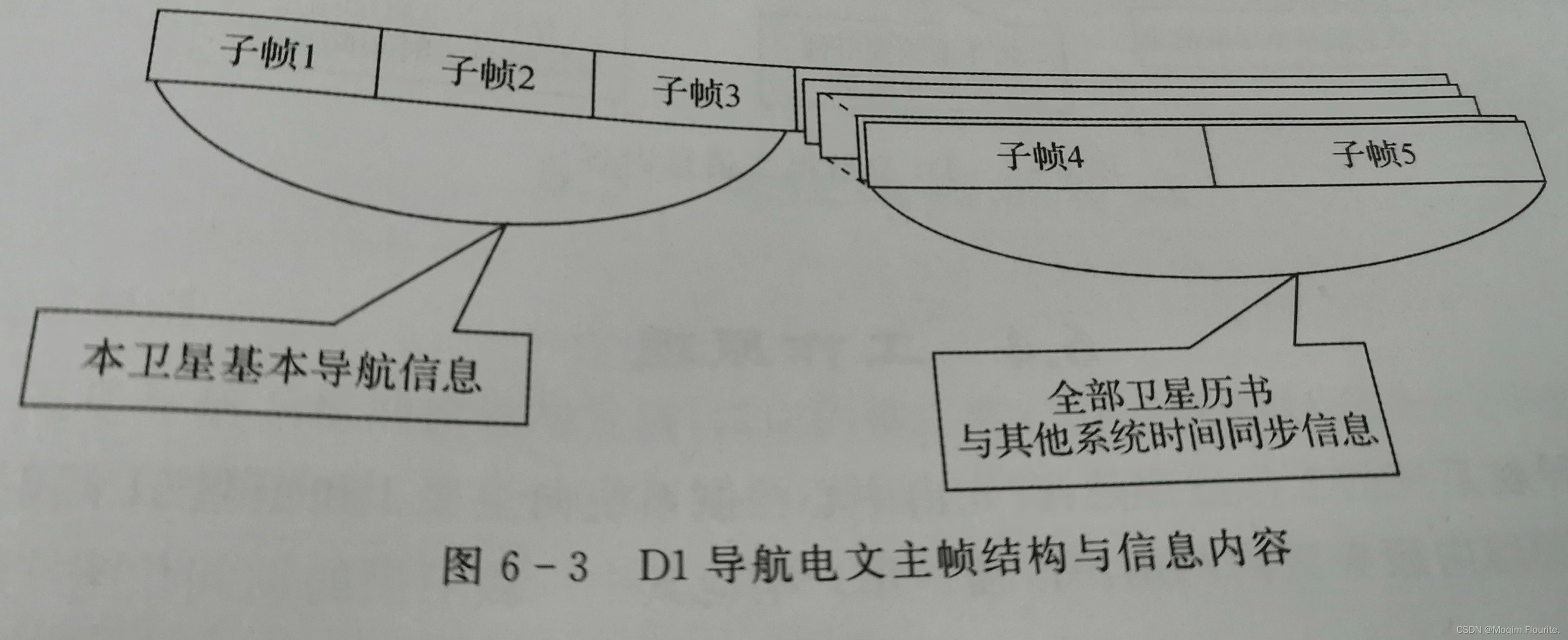
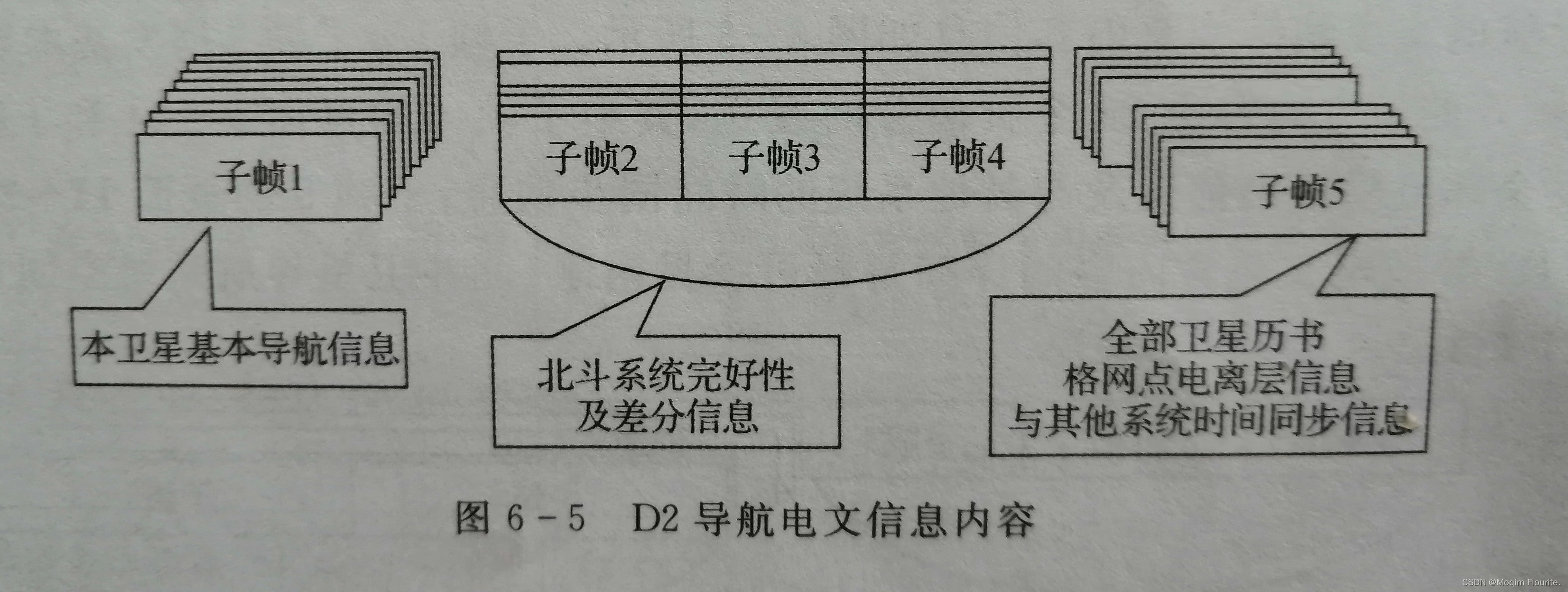
BDS导航电文
分类
分为D1导航电文和D2导航电文。
组成
由超帧、主帧和子帧组成。
速率
D1:50 bps(bits per second,比特/秒);
D2:500 bps。
基本信息
D1 基本信息:卫星基本导航信息、全部卫星历书、与其他系统(UTC、其他卫星导航系统)的时间同步信息。
D2 基本信息:卫星基本导航信息、全部卫星历书、与其他系统时间同步信息、北斗系统完好性及差分信息、各网点电离层信息。
短报文通信
双向、一次最多可传送多达120个汉字讯息。
接收机
GPS导航接收机
基本组成
由天线/低噪声前置放大器、连接电缆、接收主机组成。

多路相关器可以是1~12路相关通道或更多,由应用需要和生产厂技术水平而定。
接收机具有多少个相关通道,则可调试并行接收跟踪多少颗卫星信号。
工作原理
天线/前置放大器送来的GPS卫星信号在接收机主机中经过下变频、滤波放大、模数转换后成为数字信号送至多路相关器。多路相关器具有多路相关通道,每个相关通道由码延时锁定环和载波锁定环组成。
码延时锁定环( DLL )是将本地伪随机码(本地 C / A 码)与卫星伪码( C / A 码)对齐,实现对卫星信号的捕获、跟踪、解扩、识别、时间恢复和伪距测量;载波锁定环是一个惯性环,它使本机载波与卫星信号载波同步,以解调出卫星星历数据等,并可进行载波相位测量。相关通道的工作,完全是在微处理器的程序控制下进行的,所测得的伪距、载波相位及解调出的卫星星历数据被实时录人微处理器的存储器中。
微处理器根据采集的卫星星历、伪距观测值解算出用户的位置坐标及其他导航信息,并将解算出的用户位置和相应时间显示在显示器上或通过I/O端口输出。
键盘用于人机对话,完成用户对接收机的操作和导航功能。频率标准振荡器提供接收机的参考频率信号和时间基准信号。
频率综合器产生接收机 RF 信号下变频的本地参考信号和相关器的参考时钟频率信号。
另外,还有接收机各部件工作所需的供电电源部件。
作用
搜索并捕获卫星信号,对信号进行解调后,通过定位解算方法计算出用户所在的地理纬度、高度、速度、时间等信息。
种类
1、车载型,车载型就是用来定位车辆的导航;
2、航海型,航海型的接收机主要是用在对船舶的定位和导航。
3、航空型,航空型的接收机主要用来定位和导航飞机的,以为运行速度快,所以可以适用于其它高速运动的载体。
4、星载型,主要是用来定位和导航卫星的,比航空型的速度更快。
高频信道
包括:RF信号下变频、滤波、放大、A/D及频率综合器。
接收天线
作用
接收来自GPS卫星的信号。接收信号
种类
螺旋天线、微带天线、框形天线、缝隙天线、偶极子天线等。
GPS接收机天线技术要求
接收频率为
L
1
L_1
L1,即 1 575.42MHz 的信号;
天线辐射方向图应保证全向接收来自空中的右旋圆极化电波;
天线馈线的阻抗应为 50 Ω,其输出驻波应小于等于 2。
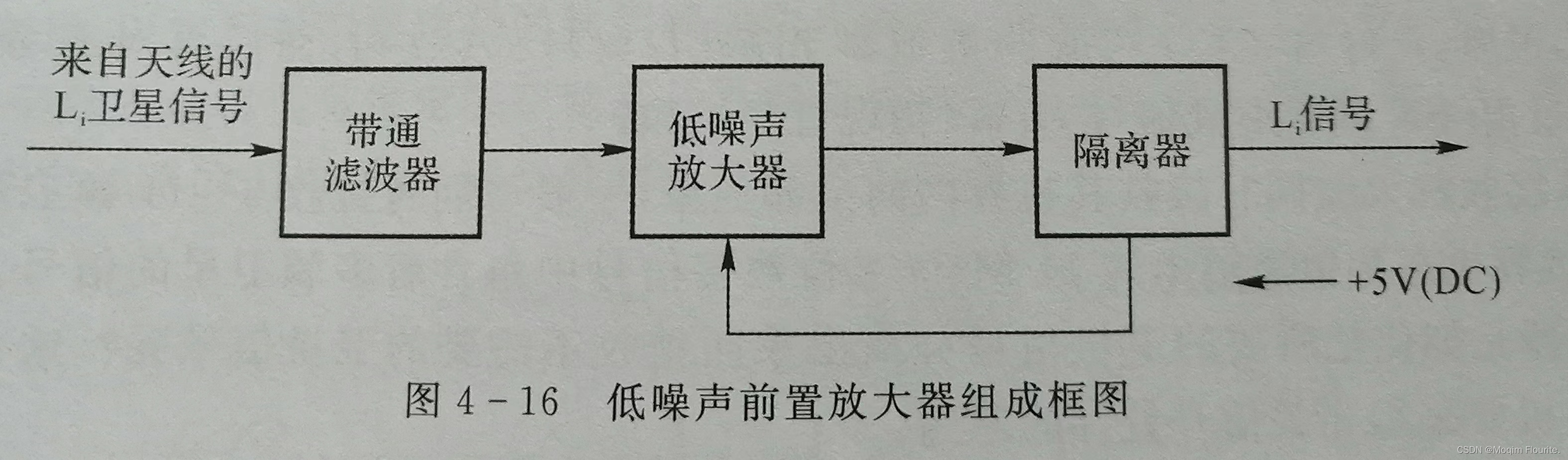
设计思路
为了保证接收机的灵敏度,通常将GPS接受天线与低噪声前置放大器做成一体,使天线输出端至低噪声放大器输入端之间连线尽量缩短,以降低馈线损耗。
接收卫星数量
GPS接收机天线同时接收其视界内的全部卫星,一般可同时接收6~11颗卫星信号。
组合导航
组合形式数量
1、GPS+惯导
2、GPS+多普勒导航雷达
3、GPS+罗兰-C
4、惯导+多普勒导航雷达
5、多传感器组合导航
惯性导航
室内导航
解答方式
答:1、
2、
。
。
。


















 5287
5287

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











