






相位解缠是许多成像或测量技术中的关键但困难的问题,受限于传统方法的假设前提,在场景复杂区域相位解缠准确降低。随着深度学习的蓬勃发展,在相位解缠的应用潜力被逐渐挖掘,形成了不同的相位解缠策略。本文在深度研读参考文献的基础上,以一篇基于深度学习回归策略的相位解缠算法[1]为基础,认真研读神经网络(deformation detection network与phase unwrapping network)的构建框架。
- 引言
InSAR是一种基于合成孔径雷达干涉原理的遥感测量技术,可获取地形高程、地表形变等信息,已凭借全天时、全天候、高精度、广覆盖等优势,广泛应用于大地测量、地质灾害监测(火山、滑坡等)、城市规划及矿业等多领域。在InSAR技术数据处理中,相位解缠是重要环节与关键步骤之一,解缠结果直接影响InSAR解算结果的可靠性,准确恢复观测相位的整周模糊个数是实现高精度InSAR监测的关键。
相位解缠是InSAR数据处理领域的经典问题,也是难点之一研究热点与难点之一。相位解缠是将缠绕相位经过周期补偿2k(s)π后恢复为绝对相位的过程[3]。在满足Nyquist采样定理,相邻像元的相位差值不超过半个周期时,缠绕相位梯度与真实的相位梯度是相等的,进而可通过计算缠绕相位梯度进行积分解缠。相邻像元的相位梯度的计算公式如下:

在一维解缠中,任何不连续的相位均会产生整数倍周期相位的解缠错误。在由距离向与方位向组成干涉图的二维解缠中,不仅可通过最小积分路径识别残差点,而且潜在的积分路径增多,通过挑选合适的积分路径规避相位不连续的区域,限制解缠误差传播[4]。以相位连续性假设为前提的单基线二维相位解缠方法主要分为三类,以枝切法[4]为代表的路径追踪类算法,以最小二乘法为代表的最小范数类算法[5]与以统计成本费用流( Statistical-cost, Network-flow Algorithm for Phase Unwrapping, SNAPHU)[6]为代表的网络流算法。上述方法均是在相位连续性假设前提下成立,即保证干涉图的空间采样率足够高以避免混叠[7]。传统的空间相位展开方法的目的是为了尽可能避免对有效点的负面影响,而且主要适用于非严重噪声和一些离散的不连续或混叠点。但在低相干、大梯度、高噪声等复杂区域,传统的方法将失效。
传统方法可能涉及经验参数的设定,主观性强,大相位梯度可能出现相位跳变,受相位噪声的干扰严重,且具有较高的计算复杂度,对数据质量的要求较高。这极大程度上影响着相位解缠的准确度,抑制着InSAR的精度,制约应用范围。
基于此,逐渐有学者将深度学习引入进行相位解缠,大致策略可分为3大类[8],分为回归方法(直接获取缠绕相位与解缠相位的映射关系)、整周数计算方法(获取整周数后再完成解缠)、去噪+相位解缠方法。
2 研究内容
经过文献阅读,发现王腾老师团队在IEEE发表的《Deep Learning for the Detection and Phase Unwrapping of Mining-Induced Deformation in Large-Scale Interferograms》[1]利用神经网络,实现了较好效果的相位解缠。该文中,开发了两个独立运行的网络,形变区域检测网络(deformation detection network ,DDNet--用于从大规模缠绕的干涉图中检测局部沉降),与相位解缠网络(phase unwrapping network ,PUNet-用于检测出形变区域的相位解缠。不同于其他文章,该文章增添了形变区域检测的任务,这将大大提高相位解缠的效率,节约时间成本,因为神经网络只需对检测出的大相位梯度变化等相位解缠困难的区域进行相位解缠。此外,为训练这两个网络,该文章发展了一个干扰图模拟器,生成模拟矿山开采引起沉降的训练样本,并通过调节形变程度与噪声水平生成了1000个缠绕与解缠干涉图。
据相关研究,基于语义分割模型获取解缠整周数的解决方案是相对不稳定的[9]。即使是干涉图中条纹图案的轻微影响也会导致网络重新区分包装计数,这尤其是低相干、大相位梯度变化区域[10]。为了克服上述问题,本文的解缠网络PUNet采用回归的方法,直接学习缠绕相位与解缠相位之间的映射关系。PUNet结构的灵感来自于经典的去噪DnCNN模型、残差网络和扩张卷积。DnCNN专门用于图像去噪的深度卷积神经网络,采用残差学习的方式,允许网络直接学习输入图像和干净图像之间的差异(即噪声),通过学习局部特征与噪声之间的关系来进行图像去噪。此外,DnCNN还在每个卷积层之后都应用了批量归一化,以加速训练过程并提高模型性能。ResNet的核心是残差模块,它通过引入跳跃连接(Skip Connection),使得网络能够直接学习残差函数,而不是原始映射函数,通过引入“残差模块”有效解决了深度网络的退化问题,从而使得网络可以达到极深的层数。
该文章的流程框架图1所示,由模型训练、形变探测与相位解缠两部分组成。模型训练如图1(a)所示,DDNet和PUNet使用相同的框架策略,但适用不同的训练集进行独立训练,即使用干涉图-归一化形变对训练DDNet,使用干涉图-真实相位对训练PUNet。训练完成后,首先使用DDNet从大干涉图中检测局部变形的位置,然后使用PUNet对覆盖局部变形区域的patch进行解包裹,如图1(b)所示。
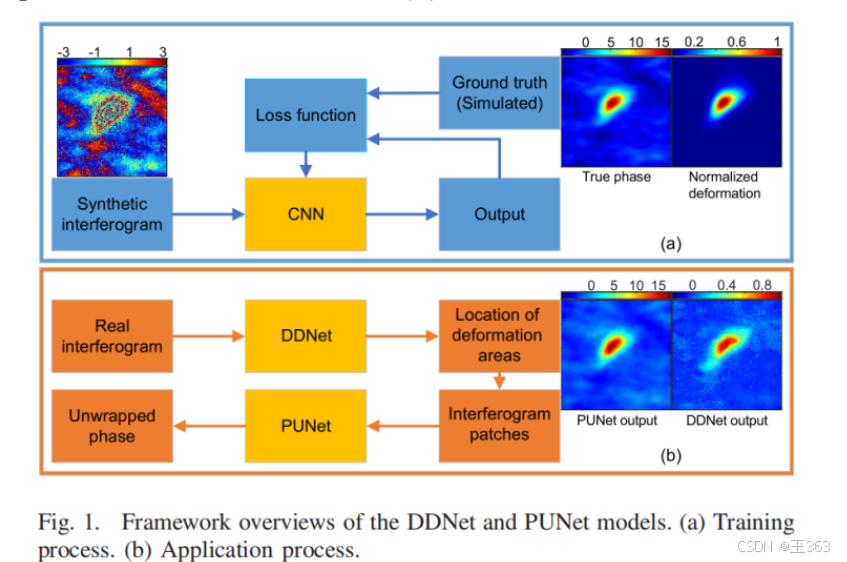
图1 流程框架图
3网络结构分析
3.1训练数据生成
由于在快速变形的噪声干涉图中难以进行可靠的相位展开,有必要生成特征接近真实干涉图的合成干涉图,并将其用于训练。干涉图相位可以分解为三个部分:变形、大气湍流和噪声[11]。
由于二维高斯曲面与开采沉陷模式相似,因此采用其模拟局部开采沉陷。在高斯二维曲面上引入随机扭曲矢量来模拟得到形变相位。此外,利用独立的高斯噪声用于模拟噪声相位,不同尺度的Perlin噪声来模拟大气干扰。其中,形变相位与大气干扰相位构成了真实相位,在形变相位梯度的基础上引入高斯噪声,再加入大气扰动相位得到模拟的干涉相位图。此外,对生成的干涉图进行高斯滤波得到最终模拟的待解缠干涉图。在生成的过程中,可以调节高斯二维曲面、扭曲适量、形变位置、噪声的相关参数,来模拟接近于真实干涉的合成干涉图。
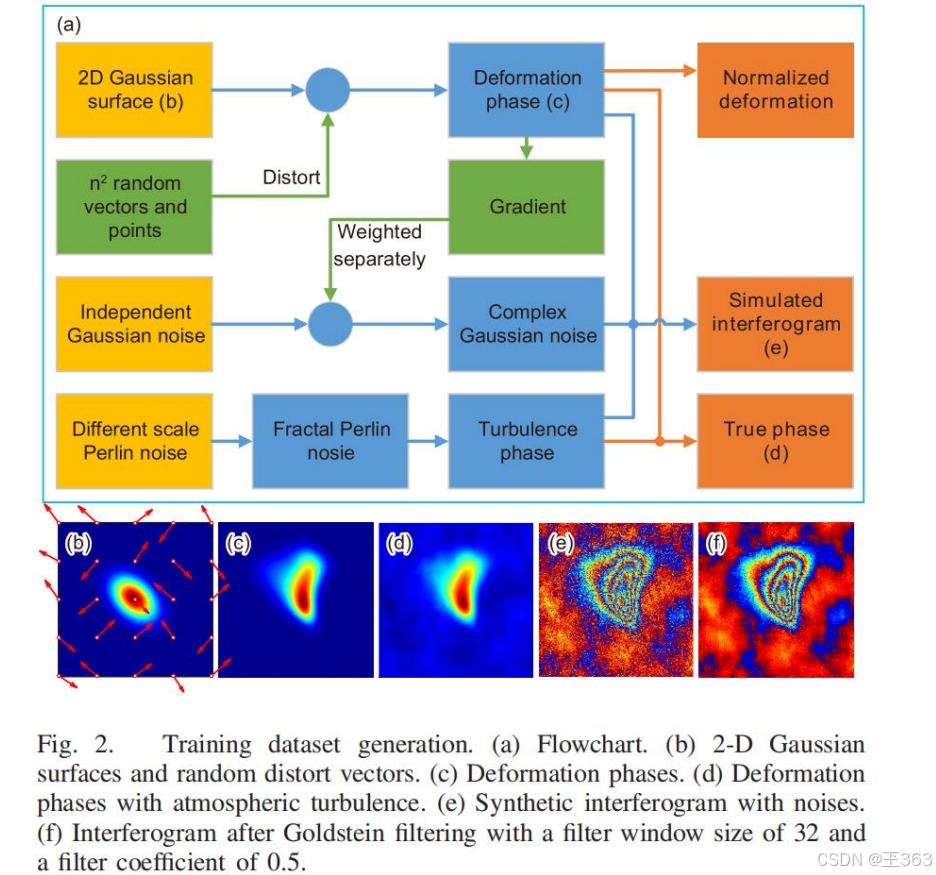
图2 InSAR数据模拟流程图
3.2 网络架构实现
文章中DDNet和PUNet使用网络深度不一样但结构类似的网络,如图3所示。通过使用两个网络的相似结构,有两方面优势,两种网络都可以使用相同类型的训练数据集,两个网络之间的迁移学习很容易实现。这两个网络不包括降采样层,所有卷积层使用相同的填充来使输出和输入区域的大小相同。
Conv:卷积层;ReLU:激活层;dilated conv:扩张卷积;dilated block:扩张模块;residual block:残差模块;BR代表Batch normalization归一化和ReLU激活操作。
第一层:3*3卷积滤波器,180*180的干涉图提取出64个特征图;
第二层:dilated blocks;为了同时考虑局部和非局部信息,采用该模块捕获干涉图的多尺度信息。使用3 × 3、5 × 5和7 × 7三个不同大小的卷积核来捕获多尺度信息。每个窗口分别获取包含不同尺度的64个特征信息,其中,在不影响图像分辨率和覆盖范围的情况下,使用窗口为5 × 5和7 × 7的扩张卷积扩展接收野,感知更丰富的信息。然后利用Batch normalization批处理归一化和ReLU激活后进行串联,这两个操作表示为BR。最后,使用3 × 3大小的滤波器进行多尺度信息融合,并进行BR操作,便于利用多尺度信息更好地提取条纹和噪声的特征。至此,一个扩张模块至此结束。在本文中,DDNet与PUNet分别采用4个扩张模块与8个扩张模块。
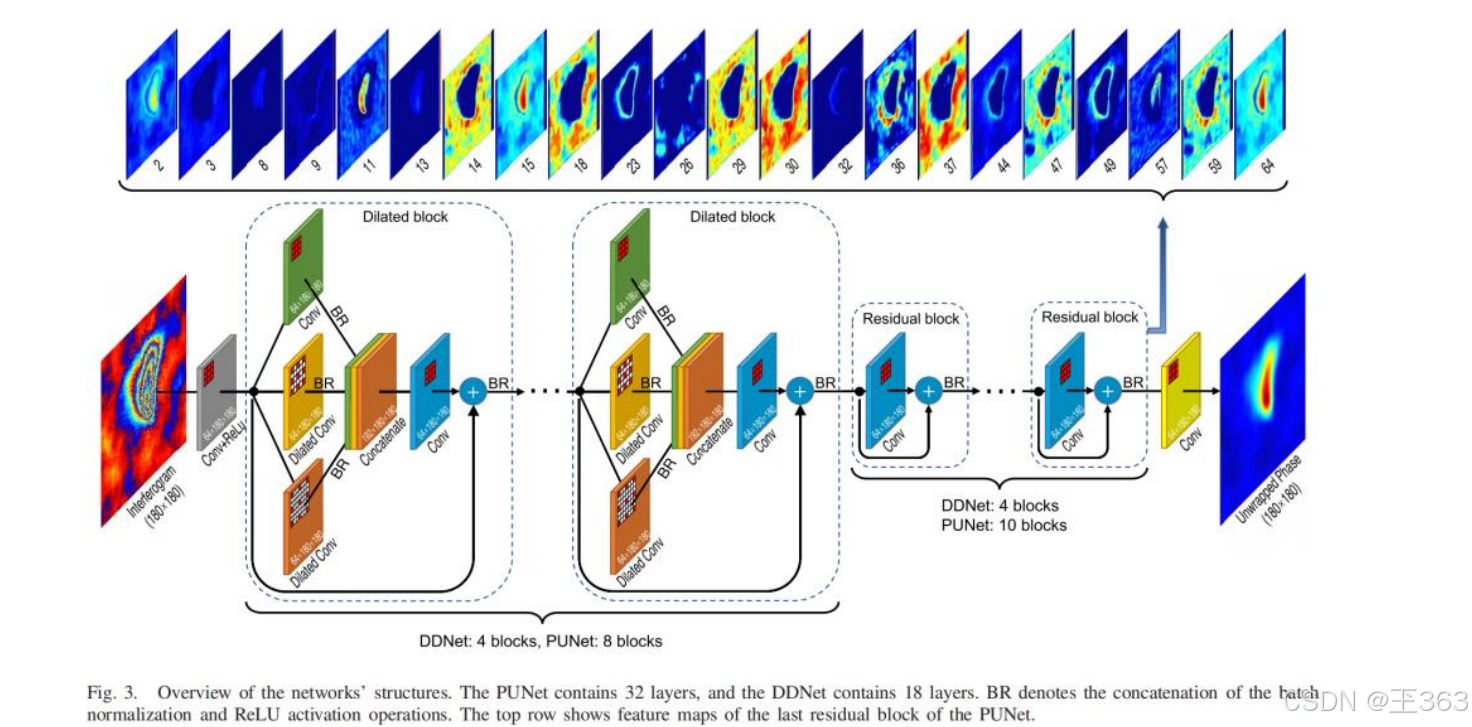
残差模块
残差模块仅包含一个卷积层,其中包含3 × 3的滤波器,用于恢复特征信息。此外,采用BR操作,内核大小为3 × 3。在最后一层,使用3 × 3滤波器重建期望值。在本文中,DDNet与PUNet分别采用4个残差模块与10个残差模块。
损失函数:
DDNet和PUNet使用相同的损失函数,被定义为真实相位与网络输出的解缠相位之间的均方误差。
PUNet的损失函数直接评估了训练样本的解缠相位和真实相位之间的差异,而没有应用大多数传统相位解缠方法中隐含的相位连续性假设条件。因此,PUNet具有很强的特征表示能力,可以从密集边缘区域与大相位梯度区域中提取信息,进行解缠.
4研究方案及网络性能测试
4.1训练数据
由于在快速变形的噪声干涉图中难以进行可靠的相位展开,有必要生成特征接近真实干涉图的合成干涉图,并将其用于训练。干涉图相位可以分解为三个部分:变形、大气湍流和噪声。利用3.1中的方法进行模拟数据的生成。
4.2 网络的搭建与其性能的测试
文章相关代码已开源,网址为:GitHub - Wu-Patrick/Deformation-Monitoring: Deep learning for localized rapid deformation detection and InSAR phase unwrapping。其中包含,待训练的形变区域探测网络DDNet与形变区域相位解缠网络PUNet架构,及利用文章中模拟的解缠相位数据训练出的DDNet与PUNet。
为了测试应用场景中DDNet的性能,模拟了13个大小为6000×9000像素的干涉图,并在每个干涉图的相同位置随机分配300个变形区域。将这些模拟的大气湍流和复杂高斯噪声分别添加到干涉图中,如图4(a)和(c).
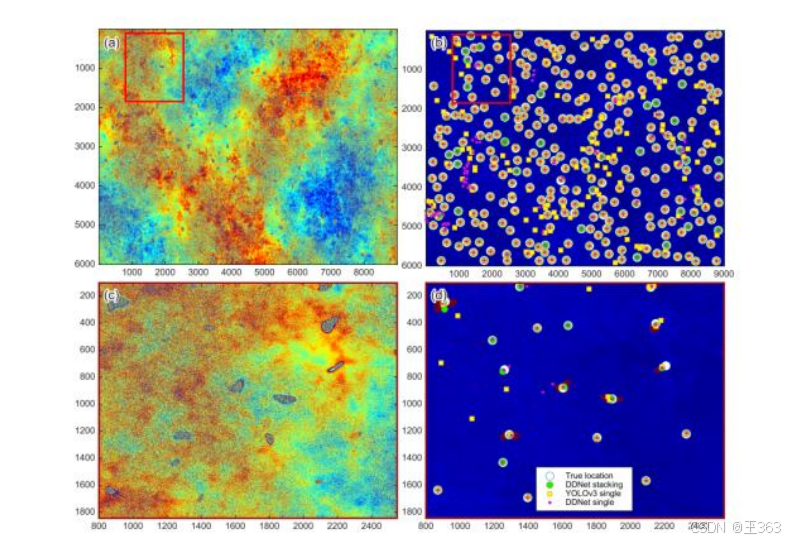
图4 DDNet测试图
DDNet根据包裹的干涉图对每个像素预测了一个0-1的值,以表明该像素属于一个局部变形区域的概率。在应用中,阈值设置为0.15个低置信度的低变形区域。在单干涉图中,DDNet检测到411个局部变形区域,其中298个定位在指定位置,平均检出率(真阳性/总沉降面积)为99.3%,如图4(b)和(d)所示。
为了进行比较,文章还采用先进的目标监测YOLOv 3[12]网络。图4(a)中所示的干涉图, YOLOv3干扰阈值为0.15,检出率为79.0%,假阳性率为2.0%。在图4(b)和(d).中显示为黄色方块YOLOv3的检出率较低是由于难以察觉的轻微变形区域。对于时间序列干涉图,与DDNet输出具有固定大小的形变概率不同, YOLOv3输出预测盒子的位置、大小和概率。因此,很难YOLOv3的检测结果进一步堆叠以提高检测率。利用DDNet的检测结果进行形变区域探测具有优势。
 对于解缠网络PUNet的测试,主要是通过与传统经典的解缠算法SNAPHU、枝切法、Flynn不连续法、最小二乘发,以及现有的基于神经网络相位解缠算法PhaseNet2.0,DLPU进行解缠结果比较。从解缠误差图(b)中可发现,本文的PUNet解缠误差最小,结果佳。尤其是针对大相位梯度区域(如Sample3)的解缠。
对于解缠网络PUNet的测试,主要是通过与传统经典的解缠算法SNAPHU、枝切法、Flynn不连续法、最小二乘发,以及现有的基于神经网络相位解缠算法PhaseNet2.0,DLPU进行解缠结果比较。从解缠误差图(b)中可发现,本文的PUNet解缠误差最小,结果佳。尤其是针对大相位梯度区域(如Sample3)的解缠。
Z. Wu, T. Wang, Y. Wang, R. Wang, and D. Ge, "Deep Learning for the Detection and Phase Unwrapping of Mining-Induced Deformation in Large-Scale Interferograms," IEEE Transactions on Geoscience and Remote Sensing, vol. 60, pp. 1-18, 2022, doi: 10.1109/TGRS.2021.3121907.

















 1980
1980

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









