






使用pnp方法可以计算相机在空间中的位姿,包括旋转R与平移t。
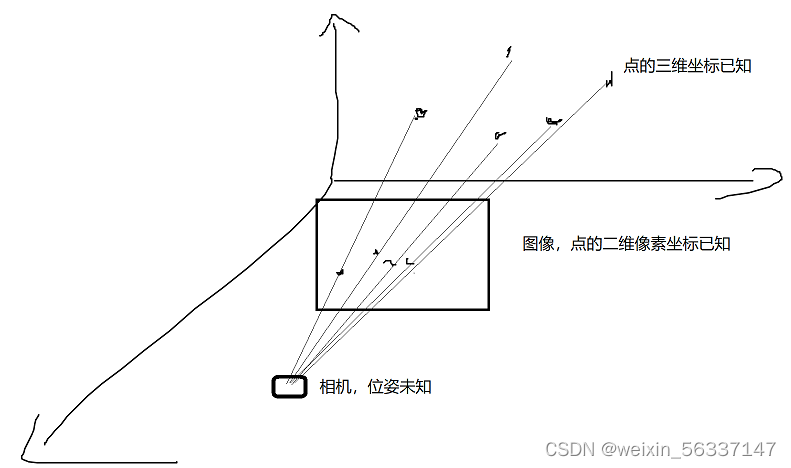
pnp,简言之,已知几个点在三维空间中的坐标,未知相机的空间位姿。现在相机拍摄这几个已知点,得到图像,即已知点在图片中的像素坐标也已知了,通过已知点的三维坐标与二维坐标、相机参数,可以计算得到相机在世界坐标系下的位姿R、t。
示意图:
OpenCV中solvePnP函数
void solvePnP(InputArray objectPoints, InputArray imagePoints, InputArray cameraMatrix, InputArray distCoeffs, OutputArray rvec, OutputArray tvec, bool useExtrinsicGuess=false, int flags = CV_ITERATIVE)输入:
objectPoints - 世界坐标系下的景物点的三维坐标
imagePoints - 图像坐标系下对应点的二维坐标
cameraMatrix - 相机的内参矩阵
distCoeffs - 相机的畸变系数
flags - 默认使用CV_ITERATIV迭代法
输出:
rvec - 输出的旋转向量。使坐标点从世界坐标系旋转到相机坐标系
tvec - 输出的平移向量。使坐标点从世界坐标系平移到相机坐标系
完整代码:
pose.cpp
#include "opencv2/core/core.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/calib3d/calib3d.hpp"
#include "opencv2/highgui/highgui.hpp"
#include <iostream>
#include <string>
std::vector<cv::Point2f> Generate2DPoints();
std::vector<cv::Point3f> Generate3DPoints();
int main( int argc, char* argv[])
{
// Read points
std::vector<cv::Point2f> imagePoints = Generate2DPoints();
std::vector<cv::Point3f> objectPoints = Generate3DPoints();
std::cout << "There are " << imagePoints.size() << " imagePoints and " << objectPoints.size() << " objectPoints." << std::endl;
//camera parameters
double fx = 800; //focal length x
double fy = 800//focal le
double cx = 400; //optical centre x
double cy = 500; //optical centre y
cv::Mat cameraMatrix(3,3,cv::DataType<double>::type);
cameraMatrix.at<double>(0,0)=fx;
cameraMatrix.at<double>(1,1)=fy;
cameraMatrix.at<double>(2,2)=1;
cameraMatrix.at<double>(0,2)=cx;
cameraMatrix.at<double>(1,2)=cy;
cameraMatrix.at<double>(0,1)=0;
cameraMatrix.at<double>(1,0)=0;
cameraMatrix.at<double>(2,0)=0;
cameraMatrix.at<double>(2,1)=0;
//std::cout << "Initial cameraMatrix: " << cameraMatrix << std::endl;
cv::Mat distCoeffs(5,1,cv::DataType<double>::type);
distCoeffs.at<double>(0) = -0.09;
distCoeffs.at<double>(1) = 0.33;
distCoeffs.at<double>(2) = 0;
distCoeffs.at<double>(3) = 0;
distCoeffs.at<double>(5) = -0.22;
cv::Mat rvec(3,1,cv::DataType<double>::type);
cv::Mat tvec(3,1,cv::DataType<double>::type);
cv::solvePnP(objectPoints, imagePoints, cameraMatrix, distCoeffs, rvec, tvec);
//输出计算结果
std::cout << "rvec: " << rvec << std::endl;
std::cout << "tvec: " << tvec << std::endl;
std::vector<cv::Point2f> projectedPoints;
cv::projectPoints(objectPoints, rvec, tvec, cameraMatrix, distCoeffs, projectedPoints);
for(unsigned int i = 0; i < projectedPoints.size(); ++i)
{
std::cout << "Image point: " << imagePoints[i] << " Projected to " << projectedPoints[i] << std::endl;
}
return 0;
}
std::vector<cv::Point2f> Generate2DPoints()
{
std::vector<cv::Point2f> points;
float x,y;
//x和y是图片上的像素坐标,
x=100 ; y=110;
points.push_back(cv::Point2f(x,y));
x=100;y=1;
points.push_back(cv::Point2f(x,y));
x=2 ; y=2;
points.push_back(cv::Point2f(x,y));
x=2;y=2;
points.push_back(cv::Point2f(x,y));
x=2 ; y=2;
points.push_back(cv::Point2f(x,y));
x=3;y=3;
points.push_back(cv::Point2f(x,y));
x=2 ; y=4;
points.push_back(cv::Point2f(x,y));
x=4;y=4;
points.push_back(cv::Point2f(x,y));
for(unsigned int i = 0; i < points.size(); ++i)
{
// std::cout << points[i] << std::endl;
}
return points;
}
std::vector<cv::Point3f> Generate3DPoints()
{
std::vector<cv::Point3f> points;
float x, y, z;
//xyz是图片上的像素对应的景物点在世界坐标系中的三维坐标,
x=5; y=0; z=0;
points.push_back(cv::Point3f(x,y,z));
x=5; y=6; z=0;
points.push_back(cv::Point3f(x,y,z));
x=0; y=6; z=0;
points.push_back(cv::Point3f(x,y,z));
x=5;y=6;z=0;
points.push_back(cv::Point3f(x,y,z));
x=5; y=0; z=0;
points.push_back(cv::Point3f(x,y,z));
x=5; y=6; z=0;
points.push_back(cv::Point3f(x,y,z));
x=0; y=6; z=0;
points.push_back(cv::Point3f(x,y,z));
x=5; y=6; z=0;
points.push_back(cv::Point3f(x,y,z));
for(unsigned int i = 0; i < points.size(); ++i)
{
// std::cout << points[i] << std::endl;
}
return points;
}
使用cmake
CMakeLists.txt
cmake_minimum_required(VERSION 2.8)
project(vo1)
set(CMAKE_BUILD_TYPE "Release")
add_definitions("-DENABLE_SSE")
set(CMAKE_CXX_FLAGS "-std=c++14 ${SSE_FLAGS} -msse4")
list(APPEND CMAKE_MODULE_PATH ${PROJECT_SOURCE_DIR}/cmake)
set(OpenCV_DIR /usr/lib/x86_64-linux-gnu/cmake/opencv4)
find_package(OpenCV REQUIRED)
include_directories(
${OpenCV_INCLUDE_DIRS}
${Sophus_INCLUDE_DIRS}
"/usr/local/include/eigen3/"
)
add_executable(pose pose.cpp)
target_link_libraries(pose
${OpenCV_LIBS}
fmt)
代码仅供参考、学习。
欢迎交流。
参考:
https://github.com/LiliMeng/SolvePNP![]() https://github.com/LiliMeng/SolvePNP
https://github.com/LiliMeng/SolvePNP















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









