






一、代码下载
首先进行openssh的安装,有了openssh才能在vscode上进行远程编程操作
suodo apt install openssh-server安装完后,查看server的状态
sudo systemctl status ssh如果是running说明是正常跑起来了
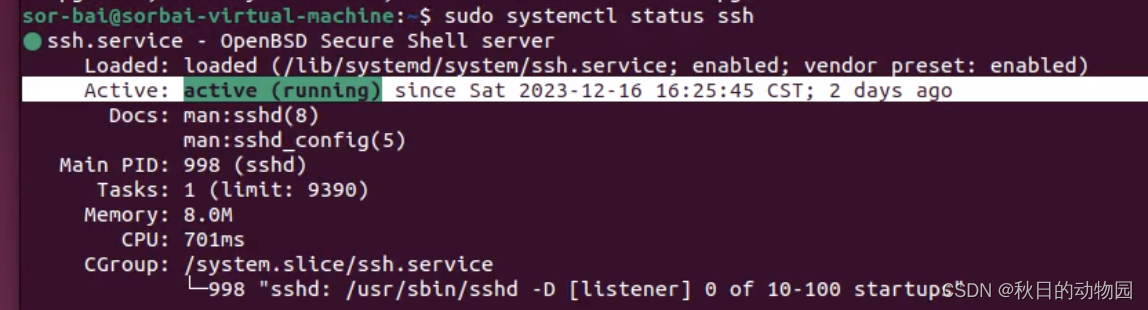
这里systemctl的作用是(参考文心一言)
systemctl是一个用于控制systemd系统和服务管理器的命令行工具。systemd是 Linux 系统初始化系统(init system)和服务管理器,它替代了传统的 init 系统(如 SysV init 或 Upstart),并提供了更为强大和灵活的服务管理能力。
systemctl的主要功能和用途包括:
启动、停止、重启和重载服务:你可以使用
systemctl来管理运行在系统上的服务。例如,systemctl start nginx会启动 nginx 服务,而systemctl stop nginx则会停止它。查看服务状态:通过
systemctl status 服务名命令,你可以查看服务的当前状态,包括它是否正在运行、最近的日志输出等。启用、禁用和列出服务:你可以使用
systemctl enable 服务名来在系统启动时自动启动某个服务,而systemctl disable 服务名则会禁止该服务在启动时自动运行。systemctl list-units --type=service可以列出所有当前正在运行的服务。查看和管理系统目标(targets):在
systemd中,目标(target)是一组服务的集合,这些服务一起定义了一个特定的系统运行状态(如多用户模式、图形界面模式等)。systemctl可以用来列出、激活和查看这些目标。管理挂载点、定时器和其他单元:除了服务之外,
systemd还管理挂载点、设备、套接字、定时器等多种类型的单元(units)。systemctl同样可以用来管理这些单元。重新加载 systemd 配置:如果修改了
systemd的服务文件或其他配置文件,你可以使用systemctl daemon-reload命令来重新加载systemd的配置,使修改生效。查看系统日志:虽然
systemctl本身不直接管理日志,但它可以配合journald(systemd的日志服务)来查看系统日志,例如通过systemctl status命令查看服务的日志输出。总之,
systemctl是管理systemd服务和系统状态的重要工具,它提供了丰富的功能和灵活的选项,使系统管理员能够更方便地控制和管理 Linux 系统上的服务和进程。
然后打开sshserver允许访问防火墙外部的权限,或者允许外部来连接sshserver
sudo ufw allow ssh
接下来通过免密操作连接github
首先检查是否存在~/.ssh目录
首先进行检查
cd ~/.ssh若不存在,说明此时机器里并没有密钥
那么输入指令生成密钥:
ssh -keygen -t rsa -C "xxx@xxx.com"此时重新检测,密钥是否生成
cd ~/.ssh在ssh文件夹下输入ll,查看密钥信息:
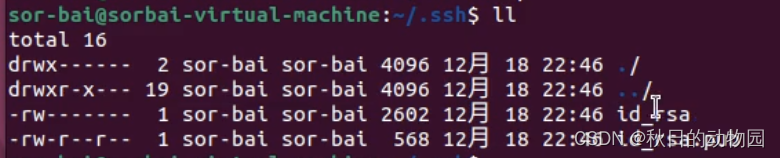 发现存在id_rsa.pub密钥,打开这个密钥文件
发现存在id_rsa.pub密钥,打开这个密钥文件
cat id_ras.pub
将该密钥拷贝到github上,来到github,找到setting
找到
![]()
然后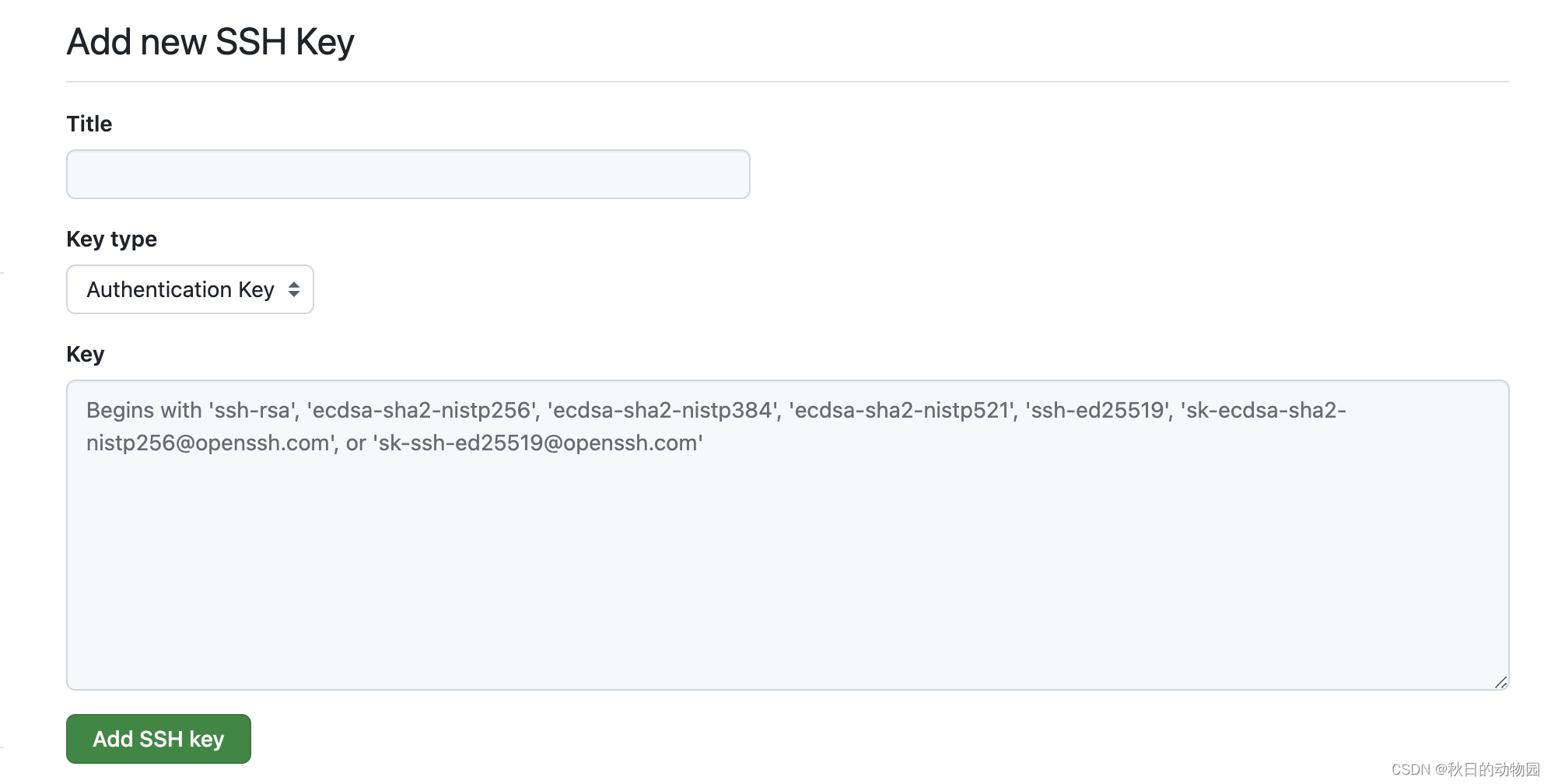 将刚才cat的密钥拷贝到key处,可以在title处起一个名字,然后确认添加该密钥
将刚才cat的密钥拷贝到key处,可以在title处起一个名字,然后确认添加该密钥
添加成功后,就可以下载代码了,首先来到work目录中:

删除之前的代码(现在要重新下载干净的代码),这里使用的命令是:
rm -rf ros_protobuf_msg/这里-rf的作用
在Unix和Linux系统中,
rm是一个命令,用于删除文件或目录。-rf是这个命令的两个选项的组合。
-r或-R:递归删除。这意味着它会删除目录及其所有子目录和文件。如果不使用这个选项,rm默认只删除文件,不删除目录。-f:强制删除。这个选项告诉rm不要询问用户是否真的要删除每个文件或目录,而是直接删除它们。这也可以帮助避免因为某些文件或目录权限问题而出现的错误。因此,
rm -rf ros_protobuf_msg/这个命令会递归并强制删除名为ros_protobuf_msg的目录及其所有子目录和文件,而不会询问用户任何确认。注意:
rm -rf是一个非常强大的命令,如果不小心使用,可能会导致重要数据的丢失。因此,在使用这个命令之前,一定要确保你知道自己在做什么,并且确实想要删除指定的文件或目录。
如果删不掉记得加上sudo命令
然后就可以进行代码clone,首先需要安装git,这里的指令是:
sudo apt install git然后创建work目录,将代码clone下来
mkdir ~/work
cd work
git clone git@github.com:xxxxxxx二、vscode远程连接到ubuntu
首先安装远程连接工具进行连接:
sudo apt install net-tools
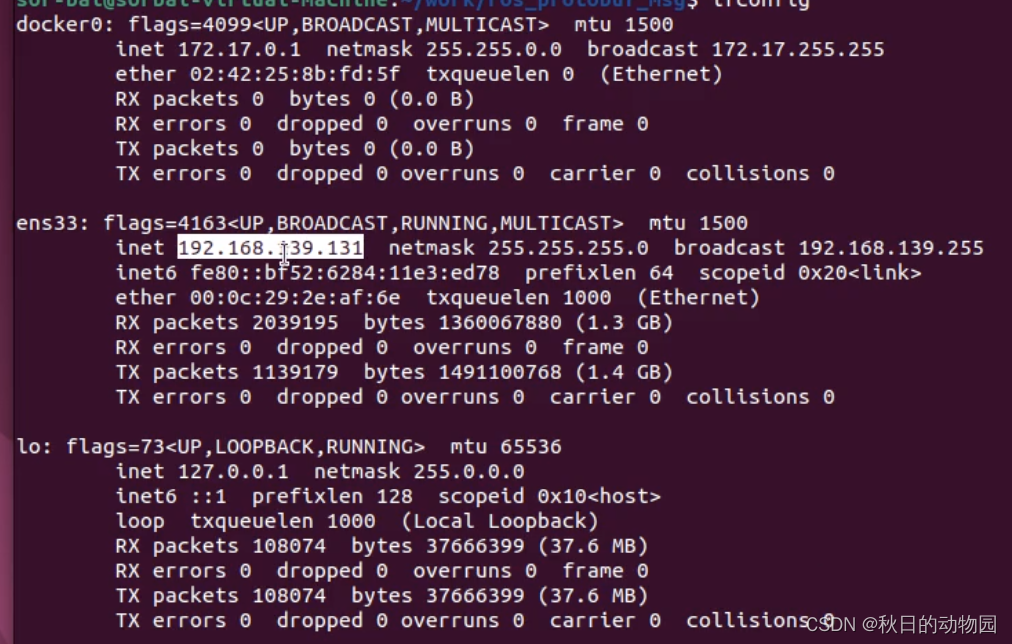
ifconfig #查看ip
这里选择ens33下的网络ip
如果是wifi进行连接的网络也可能是wlo1:
wlo1是无线网络接口的名称,通常用于表示无线局域网(WLAN)的网卡接口。在Linux系统中,网络接口的名称可能会根据系统配置和命名规则的不同而有所变化。wlo1这个名称中的“wl”可能表示“wireless LAN”,即无线局域网,而“o1”则可能是接口的一个编号或标识符。
通过wlo1这个接口,用户可以连接到无线网络,实现与其他设备的通信和数据传输。在配置和使用无线网络时,用户需要确保wlo1接口已经正确启用,并且已经配置了适当的无线网络参数,如SSID(网络名称)和密码。
需要注意的是,在不同的Linux发行版或不同的硬件设备上,无线网络接口的名称可能会有所不同。因此,在具体使用时,用户应该根据系统的实际情况来识别和使用正确的网络接口名称
然后拿到inet后面的地址:
ens33是以太网网卡的一个名称,在Linux中,每个网络接口都有一个名称,以此区分不同的网络接口。它是计算机和网络之间的桥梁,是实现网络通信的重要组成部分。通过该网卡,可以实现网络数据的传输和连接控制。
以太网是一种计算机局域网技术,它用于在计算机之间传输数据。以太网是现实世界中最普遍的一种计算机网络,它通过一系列的标准和协议,使得不同设备之间可以进行通信和数据交换。
打开vscode连接到主机:
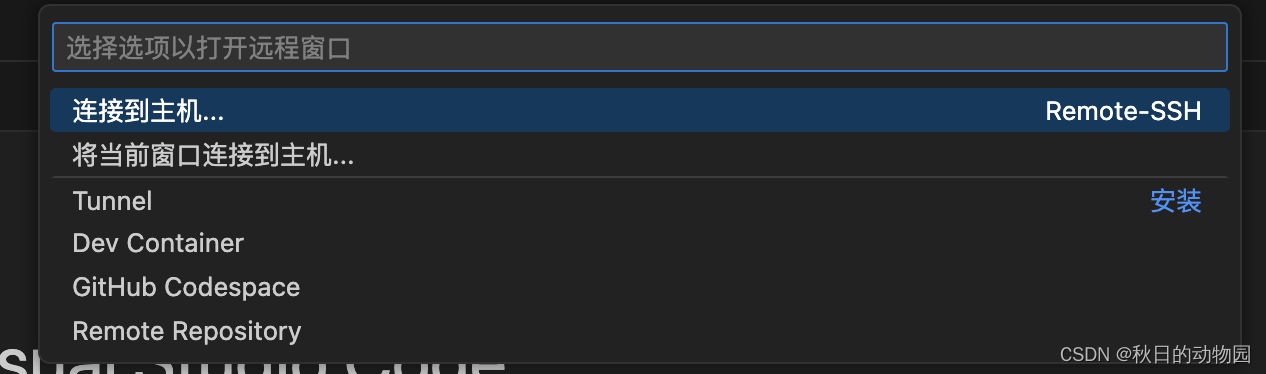 主机名字是用户名@ip地址,用户名是终端命令行@前的内容,这里是sor-bai,ip地址是刚才ifconfig获得的
主机名字是用户名@ip地址,用户名是终端命令行@前的内容,这里是sor-bai,ip地址是刚才ifconfig获得的
 如果连接不上,首先通过
如果连接不上,首先通过
sudo systemctl status ssh检查ssh服务器的状态
然后完成连接
![]()
三、安装docker
首先进行docker的安装
sudo apt install curl
curl -fsSL https://test.docker.com -o test-docker.sh
sudo sh test-docker.sh上述代码的含义为:
这三行代码是关于在Linux系统上安装和使用
curl来下载一个脚本,并随后以超级用户权限运行该脚本。下面是每行代码的详细解释:
sudo apt install curl
sudo: 这是一个命令,允许用户以超级用户(或称为root用户)的权限执行命令。使用sudo时,系统通常会要求您输入密码以确认您有权限执行该操作。apt: 这是Debian和基于Debian的Linux发行版(如Ubuntu)的包管理工具,用于安装、更新和删除软件包。install: 这是apt命令的一个选项,表示要安装一个或多个软件包。curl: 这是要安装的软件包名称。curl是一个命令行工具,用于发送数据,支持多种协议,如HTTP、FTP等。综上所述,这行代码的意思是:“以超级用户的权限安装
curl软件包”。
curl -fsSL https://test.docker.com -o test-docker.sh
curl: 这是前面安装的命令行工具,用于从给定的URL获取数据。-fsSL: 这是curl命令的几个选项的组合。
-f: 失败时静默(silent)或快速失败。不显示HTTP错误。-s: 静默模式。不显示进度或错误消息。-L: 如果服务器报告请求的资源已被移动到新的URL,则自动重定向到新的URL。-S: 显示错误消息。当与-s一起使用时,只显示错误消息。https://test.docker.com: 这是要从中获取数据的URL。-o test-docker.sh: 这告诉curl将获取的数据保存到一个名为test-docker.sh的文件中。这行代码的意思是:“使用
curl从https://test.docker.com下载数据,并将数据保存为test-docker.sh文件”。
sudo sh test-docker.sh
sudo: 如前所述,这允许以超级用户的权限执行命令。sh: 这是一个shell程序,用于执行shell脚本。test-docker.sh: 这是前面使用curl下载的脚本文件。这行代码的意思是:“以超级用户的权限执行
test-docker.sh脚本”。
然后将用户添加到docker用户组:
sudo groupadd docker
sudo usermod -aG docker ${USER}
sudo systemctl restart docker
newgrp docker
docker ps上述代码的含义为:
当然可以,这些代码行是在Linux系统上用于设置和管理Docker的相关操作。下面是对每行代码的详细解释:
sudo groupadd docker这行代码用于创建一个新的用户组,名为
docker。Docker通常需要运行在其自己的用户组中,以便对Docker守护进程和相关的文件进行适当的访问控制。
sudo usermod -aG docker ${USER}这行代码将当前用户(
${USER}是一个环境变量,代表当前登录用户的用户名)添加到docker用户组中。-aG选项表示“追加到组”,这意味着用户将被添加到docker组,而不会从其他组中移除。这样,当前用户就可以在不使用sudo的情况下运行Docker命令。
sudo systemctl restart docker这行代码重启Docker服务。这通常是在修改了Docker的配置或权限之后做的,以确保所有的更改都生效。
systemctl是一个用于控制系统服务的工具,而restart是一个操作,表示停止并立即重新启动服务。
newgrp docker这行代码将当前用户的默认组更改为
docker组。这通常是为了确保当前用户在后续的操作中使用docker组的权限。然而,需要注意的是,这个命令只会影响当前终端会话。如果你打开一个新的终端窗口,你需要再次运行newgrp docker。
docker ps这行代码列出当前正在运行的Docker容器。
docker ps是一个Docker命令,用于查看容器的状态。如果前面的步骤都正确执行,并且你已经在docker组中,那么你应该能够不使用sudo来运行这个命令。总结:这些代码行的目的是创建一个新的
docker用户组,将当前用户添加到该组中,重启Docker服务,然后列出正在运行的Docker容器。这样,当前用户就可以在不使用sudo的情况下管理Docker容器了。
通过项目中的dockerfile文件,构建项目镜像
来到:

下,进行docker镜像的构建(按照dockerfile)
命令为:
docker build --network host -t ros_protobuf:noetic -f ros_x86.dockerfile .构建结束后,可以通过以下命令查看镜像是否构建成功:
docker images![]()
接下来要通过脚本去启动容器:
cd ~/work/ros_protobuf_msg/docker/scripts
#启动容器
./ros_docker_run.sh
脚本是将一系列操作集成化,极大程度的方便启动容器,可以看到脚本内容为:
#!/usr/bin/env bash
MONITOR_HOME_DIR="$( cd "$( dirname "${BASH_SOURCE[0]}" )/../.." && pwd )"
display=""
if [ -z ${DISPLAY} ];then
display=":1"
else
display="${DISPLAY}"
fi
local_host="$(hostname)"
user="${USER}"
uid="$(id -u)"
group="$(id -g -n)"
gid="$(id -g)"
echo "stop and rm docker"
docker stop ros_noetic_proto > /dev/null
docker rm -v -f ros_noetic_proto > /dev/null
echo "start docker"
docker run -it -d \
--privileged=true \
--name ros_noetic_proto \
-e DISPLAY=$display \
-e DOCKER_USER="${user}" \
-e USER="${user}" \
-e DOCKER_USER_ID="${uid}" \
-e DOCKER_GRP="${group}" \
-e DOCKER_GRP_ID="${gid}" \
-e XDG_RUNTIME_DIR=$XDG_RUNTIME_DIR \
-v ${MONITOR_HOME_DIR}:/work \
-v ${XDG_RUNTIME_DIR}:${XDG_RUNTIME_DIR} \
--network host \
ros_protobuf:noetic
~
~
~ 对于上述脚本的代码解释(文心一言):
这段代码是一个 Bash 脚本,主要用于停止、删除并重新启动一个 Docker 容器。以下是对这段代码的详细解释:
定义 MONITOR_HOME_DIR 变量:
bash复制代码
MONITOR_HOME_DIR="$( cd "$( dirname "${BASH_SOURCE[0]}" )/../.." && pwd )"这行命令会获取脚本自身所在目录的上级目录的上级目录,并将其绝对路径赋值给
MONITOR_HOME_DIR变量。这通常用于确定某个项目的根目录。
对于
${BASH_SOURCE[0]}的释义:在 Bash 脚本中,
${BASH_SOURCE[0]}是一个特殊的数组,它包含了当前执行的脚本或函数的文件名。当用在脚本的上下文中时,${BASH_SOURCE[0]}通常用于获取当前脚本的绝对路径。具体来说:
BASH_SOURCE是一个数组变量。${BASH_SOURCE[0]}获取数组的第一个元素,即当前脚本或函数的文件名。这在脚本中特别有用,尤其是当你想获取脚本自身的路径时,无论脚本是从哪个目录执行的。通过结合
dirname和pwd命令,你可以获取脚本所在的目录的绝对路径,这在处理相对路径或挂载的卷时特别有用。例如,考虑以下脚本片段:
bash复制代码
#!/bin/bash# 获取脚本自身的绝对路径SCRIPT_DIR="$( cd "$( dirname "${BASH_SOURCE[0]}" )" && pwd )"echo "The script is located in: $SCRIPT_DIR"无论你从哪个目录运行这个脚本,
$SCRIPT_DIR变量都会包含脚本所在的目录的绝对路径。
BASH_SOURCE数组的其他元素(如果存在)将包含调用当前脚本或函数的脚本或函数的名称。这在处理嵌套脚本或函数时可能很有用,但${BASH_SOURCE[0]}通常是最常用的。
对于dirname的释义:
在Unix和Linux操作系统中,
dirname是一个命令行工具,用于返回文件或目录路径中的目录部分。具体来说,dirname命令会删除文件路径中的最后一个斜杠(/)及其后面的所有内容,从而只留下目录路径。例如:
bash复制代码
$ dirname /home/user/documents/file.txt/home/user/documents在这个例子中,
dirname命令返回了文件file.txt所在的目录路径。在Bash脚本中,
dirname命令经常被用来获取脚本或文件所在的目录,以便进行进一步的文件操作或设置环境变量。结合${BASH_SOURCE[0]}使用,可以获取当前执行的脚本的目录路径,如下所示:
bash复制代码
#!/bin/bash# 获取脚本所在的目录SCRIPT_DIR="$(dirname "${BASH_SOURCE[0]}")"# 获取脚本的绝对路径所在的目录ABSOLUTE_SCRIPT_DIR="$(cd "$SCRIPT_DIR" && pwd)"echo "The script is located in: $ABSOLUTE_SCRIPT_DIR"在这个脚本中,
${BASH_SOURCE[0]}返回脚本自身的相对路径,然后dirname提取出这个路径的目录部分。之后,通过cd命令和pwd命令的组合,我们可以得到这个目录的绝对路径。
2. 检查 DISPLAY 环境变量:
bash复制代码
display=""if [ -z ${DISPLAY} ];thendisplay=":1"elsedisplay="${DISPLAY}"fi这段代码首先初始化
display变量为空。然后,它检查DISPLAY环境变量是否存在。如果不存在(即-z ${DISPLAY}为真),则将display设置为:1。否则,它保留DISPLAY环境的原始值。
3. 获取本地主机名、用户、UID、组名和GID:
bash复制代码
local_host="$(hostname)"user="${USER}"uid="$(id -u)"group="$(id -g -n)"gid="$(id -g)"这些命令获取当前机器的主机名、当前登录用户的用户名、用户ID、组名和组ID。
4. 停止和删除 Docker 容器:
bash复制代码
echo "stop and rm docker"docker stop ros_noetic_proto > /dev/nulldocker rm -v -f ros_noetic_proto > /dev/null首先,它输出一条消息 "stop and rm docker"。然后,它使用
docker stop命令停止名为ros_noetic_proto的 Docker 容器,并使用docker rm命令删除这个容器及其关联的卷。所有的输出都被重定向到/dev/null,这意味着你不会在终端看到任何输出。
5. 启动 Docker 容器:
bash复制代码
echo "start docker"docker run -it -d \...ros_protobuf:noetic这部分代码首先输出 "start docker",然后使用
docker run命令启动一个新的 Docker 容器。以下是命令中的参数和它们的作用:
复制代码
* `-it`: 分配一个伪终端并保持STDIN开放(通常用于交互式操作,但在这里与 `-d` 一起使用可能有些不常见)。* `-d`: 在后台运行容器并返回容器ID。* `--privileged=true`: 给予容器内进程几乎与宿主机相同的权限。* `--name ros_noetic_proto`: 为容器指定一个名称。* `-e`: 设置环境变量。在这里,它设置了多个环境变量,包括之前定义的 `DISPLAY`、`USER`、`UID`、`GROUP` 和 `GID`。* `-v`: 挂载卷。这里,它挂载了 `MONITOR_HOME_DIR` 到容器的 `/work` 目录,并挂载了 `XDG_RUNTIME_DIR` 到容器内的同名目录。* `--network host`: 使用宿主机的网络栈,这意味着容器将不会获得自己的IP地址,而是直接使用宿主机的网络。* `ros_protobuf:noetic`: 指定要运行的 Docker 镜像。最后,脚本中有两个波浪号
~,它们可能是无意的,或者是从其他地方复制时带过来的,因为它们在这里没有任何作用。总之,这个脚本的主要目的是管理一个名为
ros_noetic_proto的 Docker 容器,确保它按照预期的配置运行。
此时可以通过启动容器的脚本就已经获得了容器,那么查看容器:
docker ps
然后进入到容器中
#进入容器
./ros_docker_into.sh然后创建build文件夹
![]()
cmake ..的含义是,cmakelists.txt文件在当前文件夹的上一级文件夹中,但是构建在当前文件夹中构建,你需要去上一级文件夹去找cmakelists.txt文件。
然后进行编译:
![]()
编译完成: 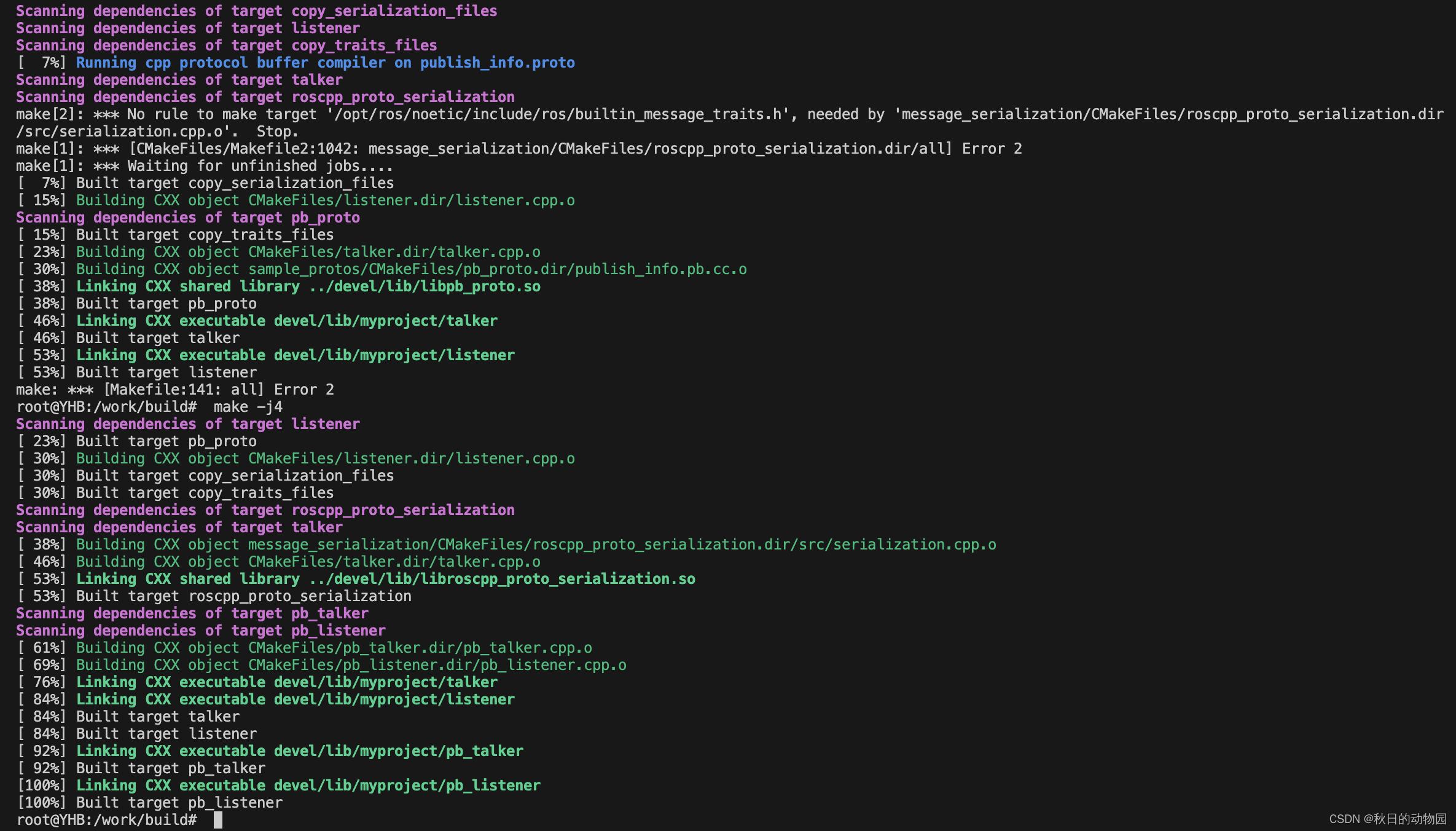















 3552
3552











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









