






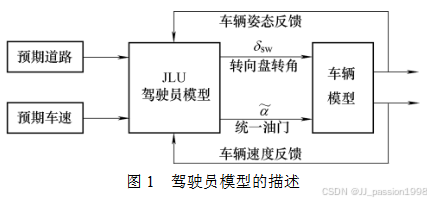
1. 驾驶员模型
对文章“基于加速度反馈的任意道路和车速 跟随控制驾驶员模型”的学习记录
2. 公式推导
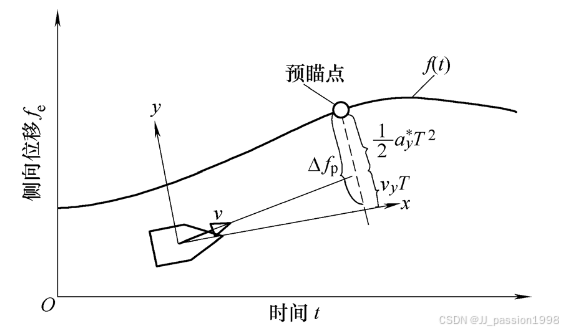
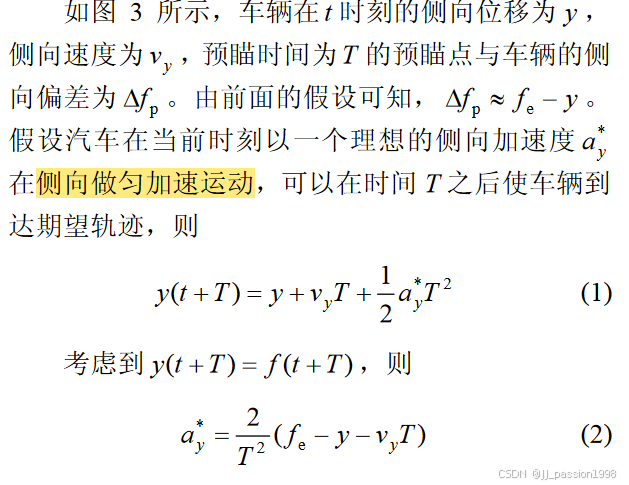
“预瞄-跟踪”理论:驾驶员对当前转向盘的操作是希望在经过预瞄时间 T 后, 使车辆的实际侧向位移y(t+T) 尽可能逼近汽车期望的侧向位移fe=f(t+T)。
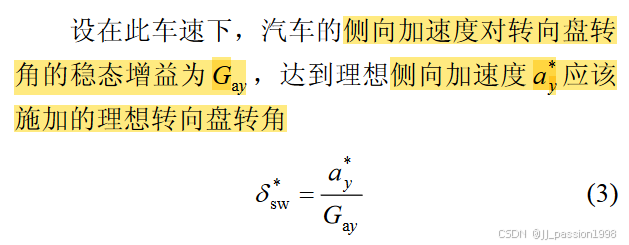
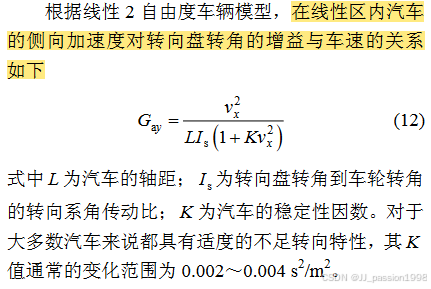
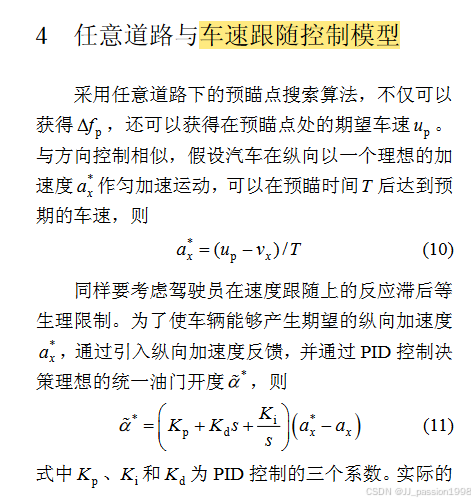
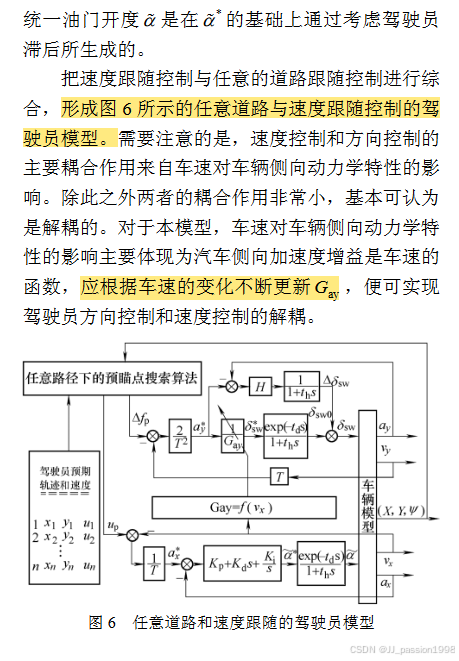
Gay 与车辆参数和纵向速度相关。
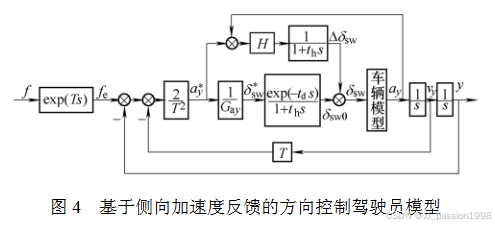
exp(-tds) 表示驾驶员的神经反应滞后,1/(1+ths)表示驾驶员的动作反应滞后.
采用侧向加速度误差反馈的方 式对驾驶员模型决策出的转向盘转角进行修正

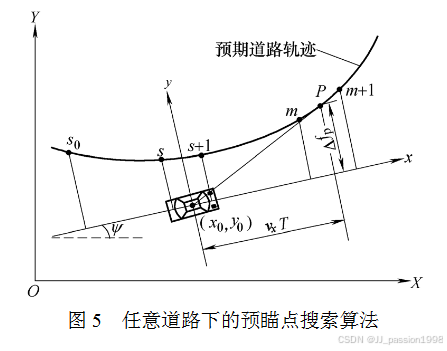
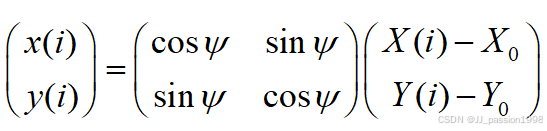
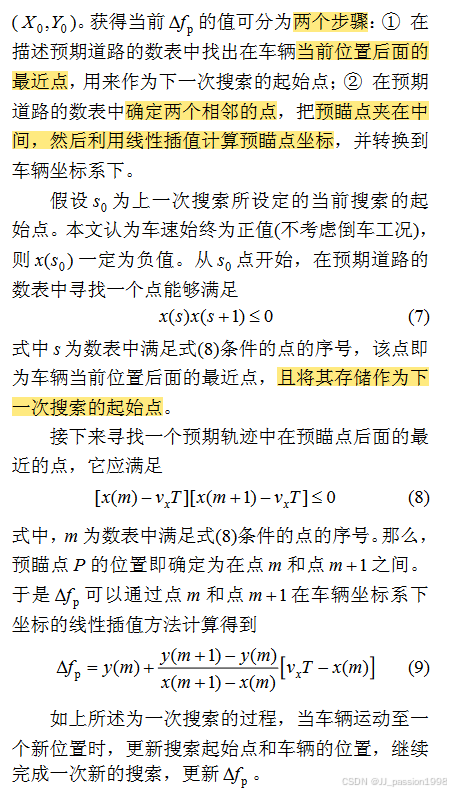
任意道路下的预瞄点搜索算法———>确定侧向位移Δfp

3. 仿真测试
用carsim 中的车辆模型与simulink进行联合测试。
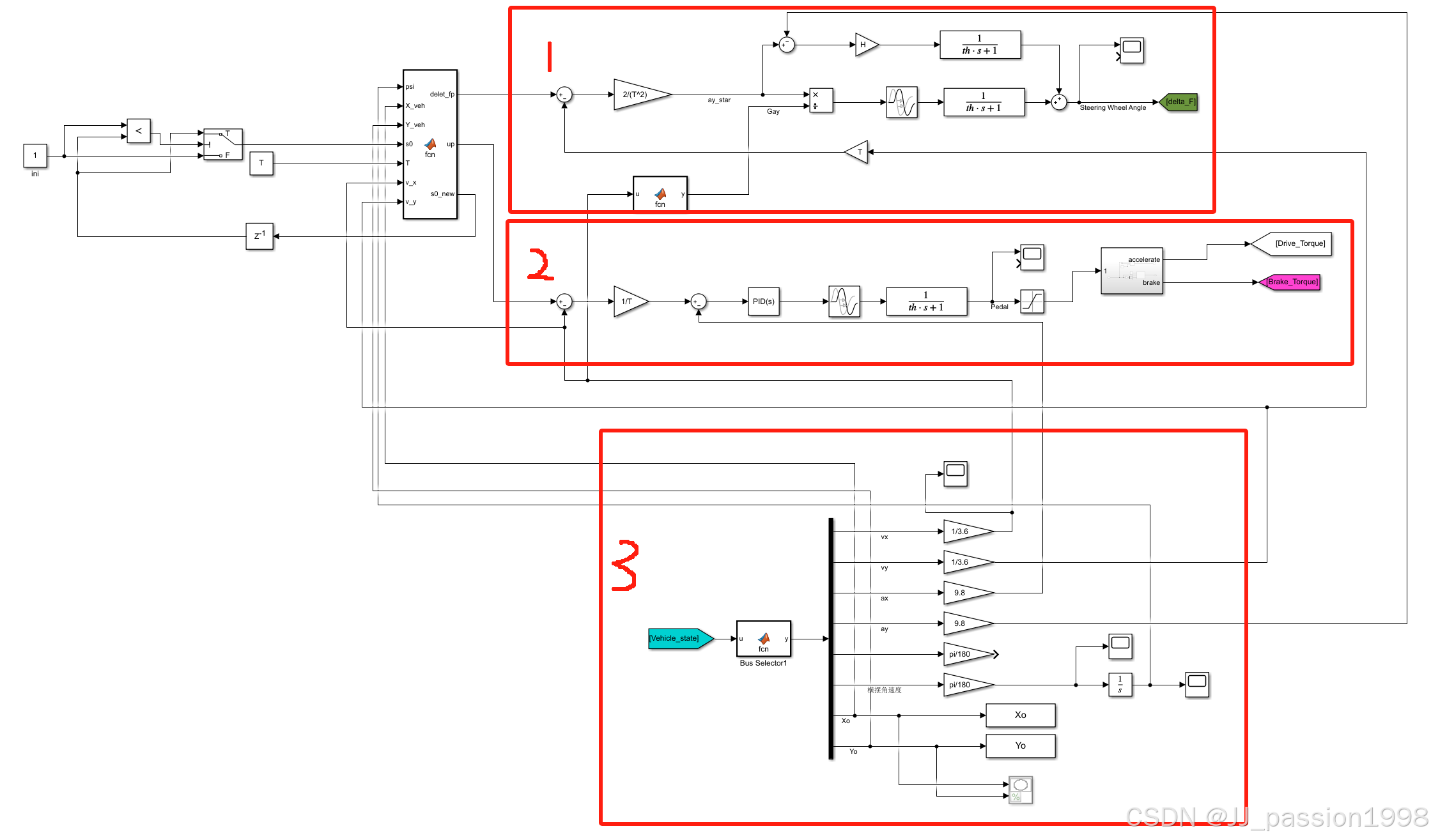
1. 前轮转角确定模块
2. 驱动转矩确定模块
3. 车辆状态输出
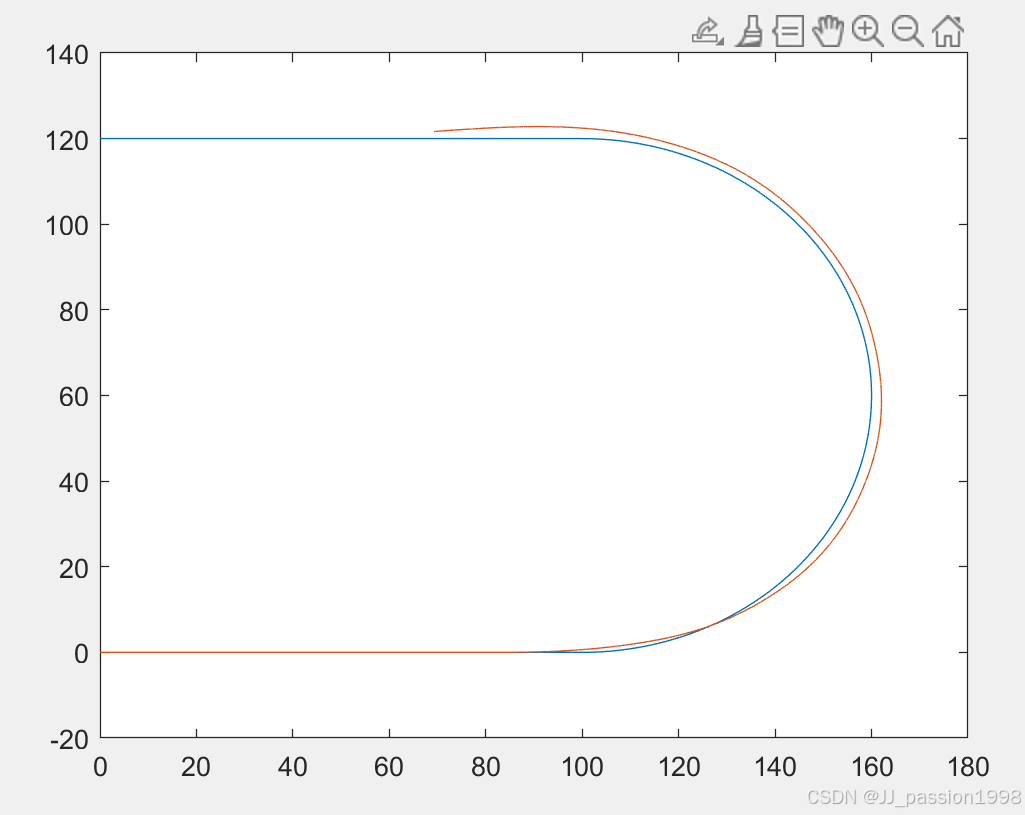
60km/h 弯道测试结果

















 2805
2805

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









