







PMSM电机模型搭建
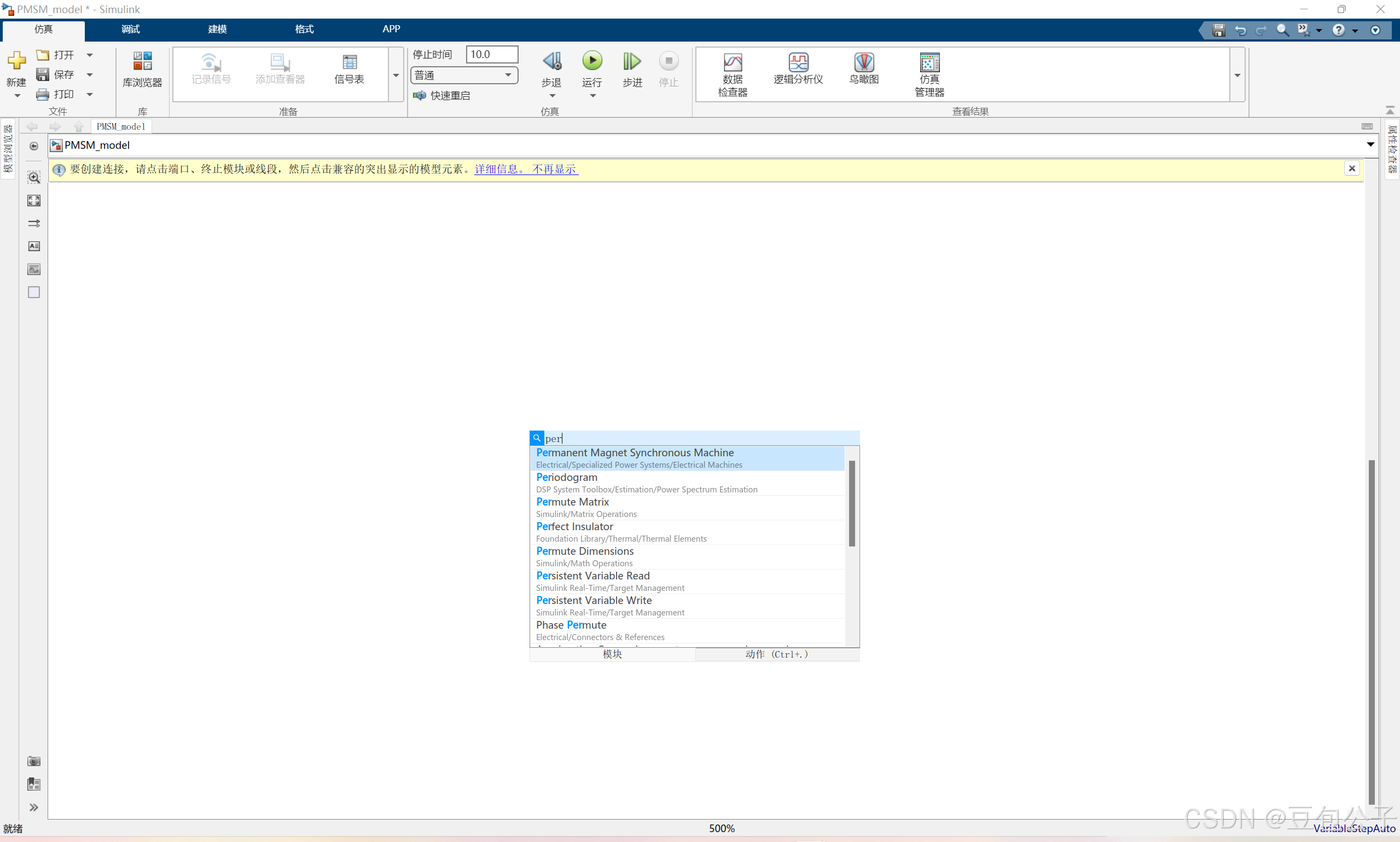
双击左键,搜索per(Permanent Magnet Synchronous Machine),第一个为PMSM电机模型
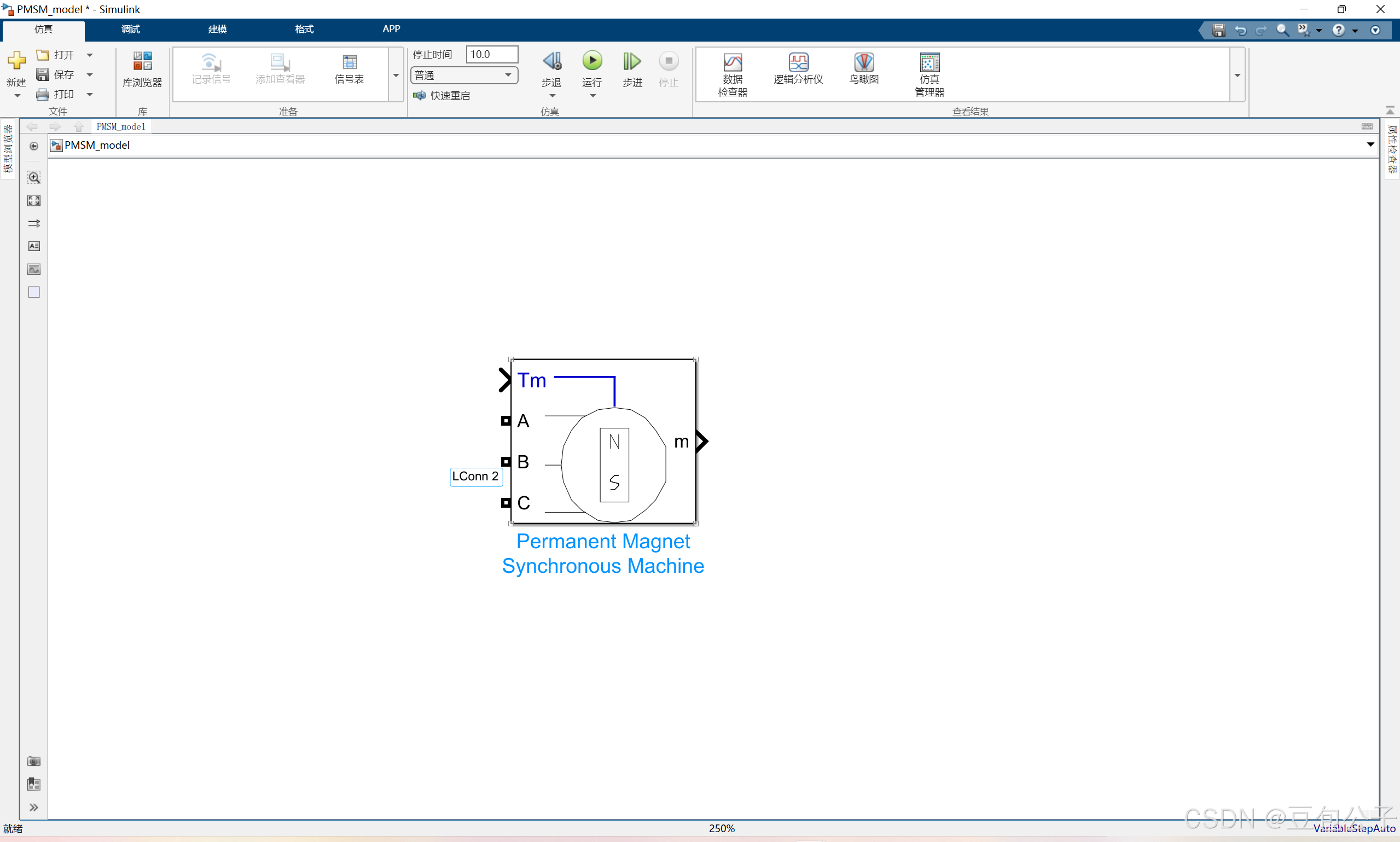
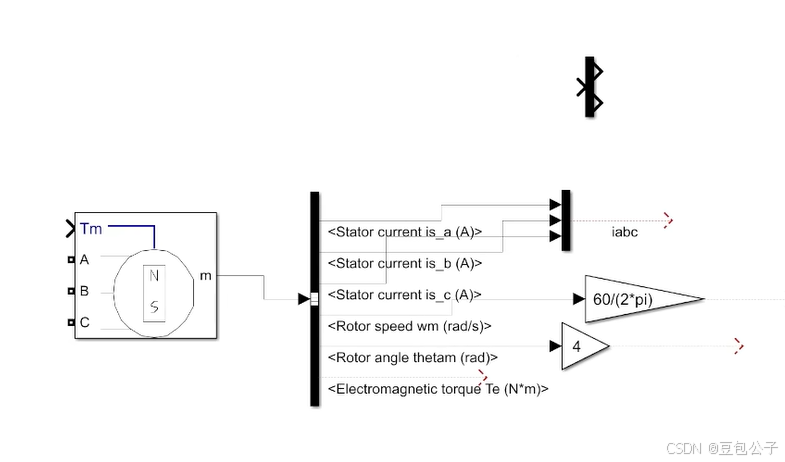
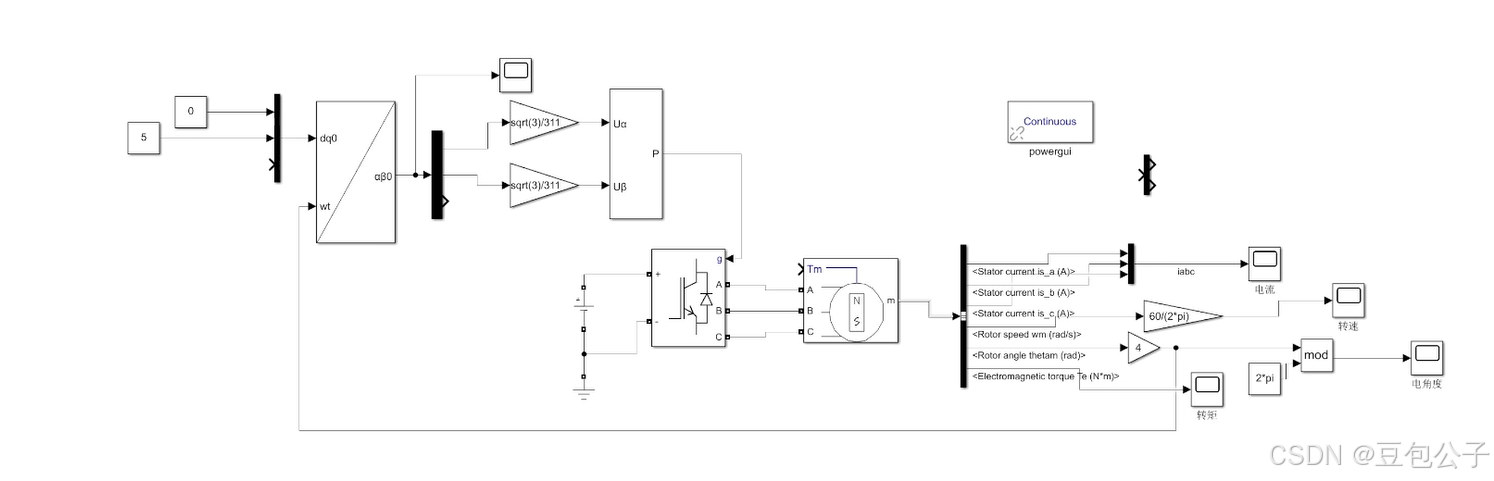
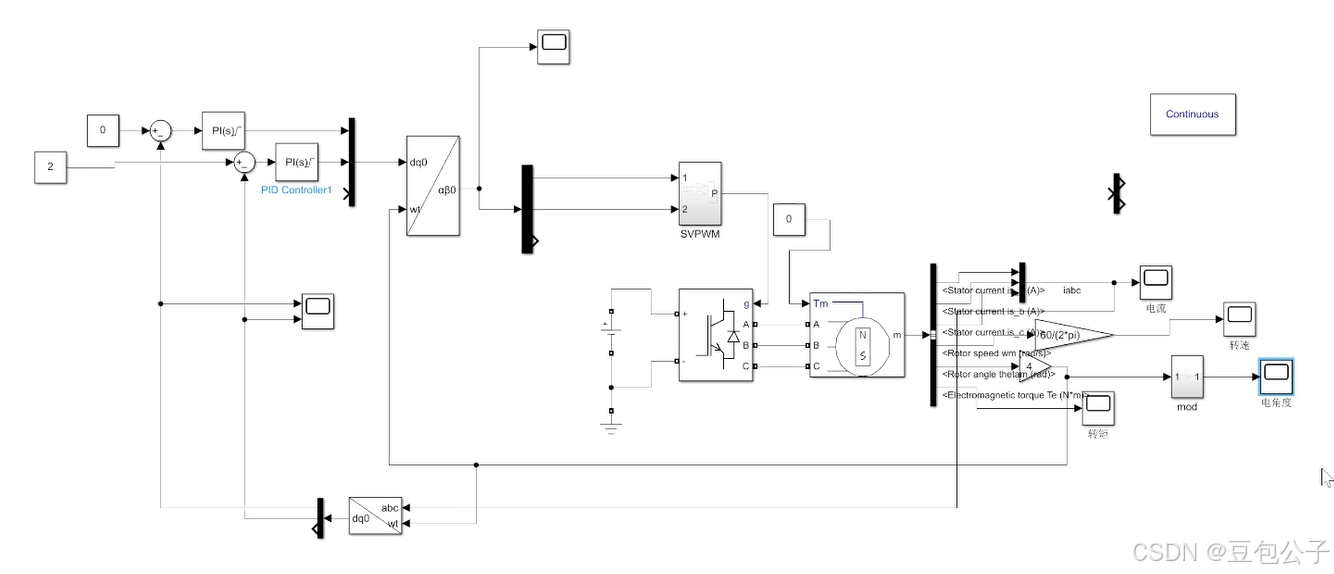
PMSM的电机模型中Tm为负载,ABC为三相线,m为电机内部的一些信息。
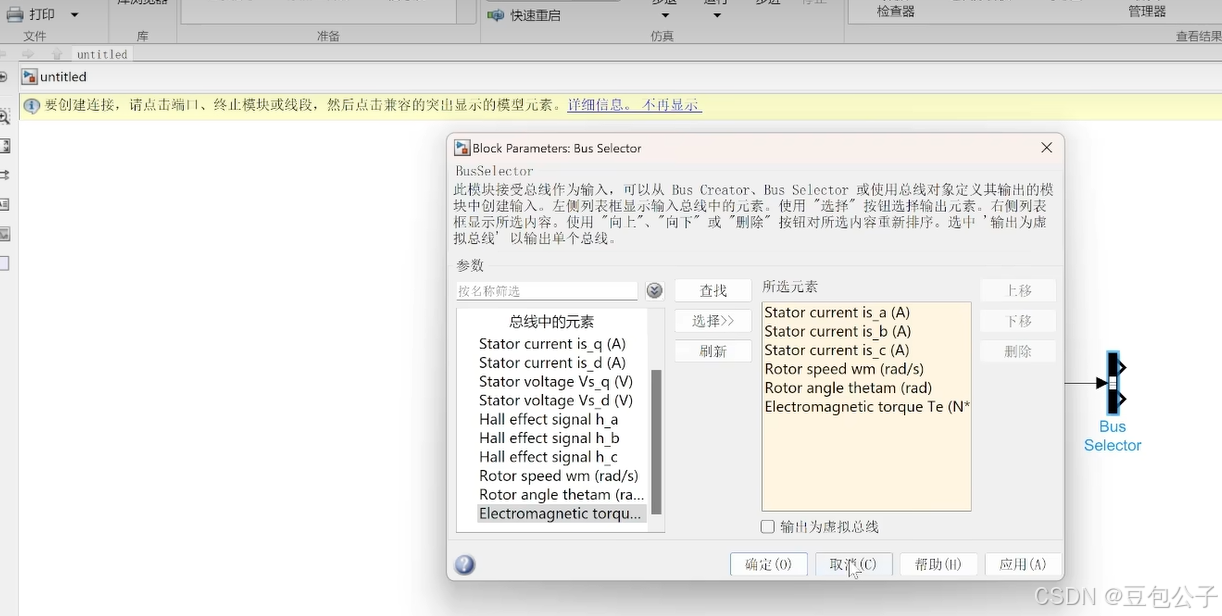
提取m中的信息,通过Bus Selector模块来提取,选取电机信息(双击Bus Selector模块):ABC相电流,转速,机械角度,转矩
注:机械角度指的是转子相对于定子旋转的实际空间角度,这是肉眼可见的角度。在无刷直流电机(BLDC)的FOC(磁场定向控制)中,Park变换就是使用电角度来进行的。这是因为在电机控制中,电角度能够准确地描述电动势和电流的变化周期,从而实现更精确的控制。
电角度与机械角度的关系可以用以下公式表示: 电角度 = 极对数 × 机械角度
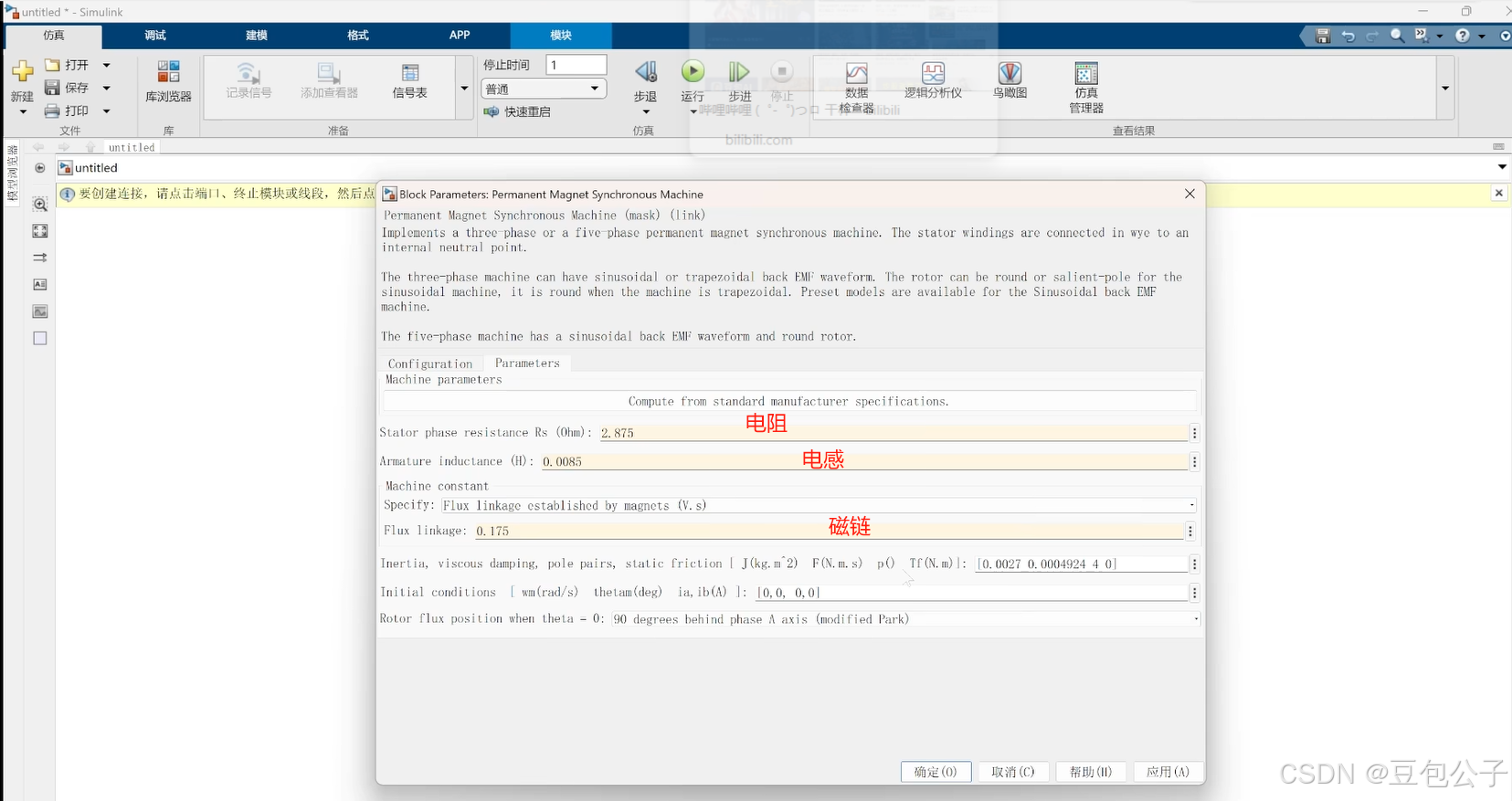
进行电机内部参数选择,电阻,电感,磁链,电机惯量J,摩擦系数,极对数等
将机械角度进行转换--电角度*4,对电角度进行取余处理可以更直观的看到转了多少圈-选取常数模块(constant),取余模块(mod)-对2*pi进行取余即可;
转速由rad/s转化为rad/min----*60/(2*pi),MUX模块多接一;
SVPWM模块的搭建
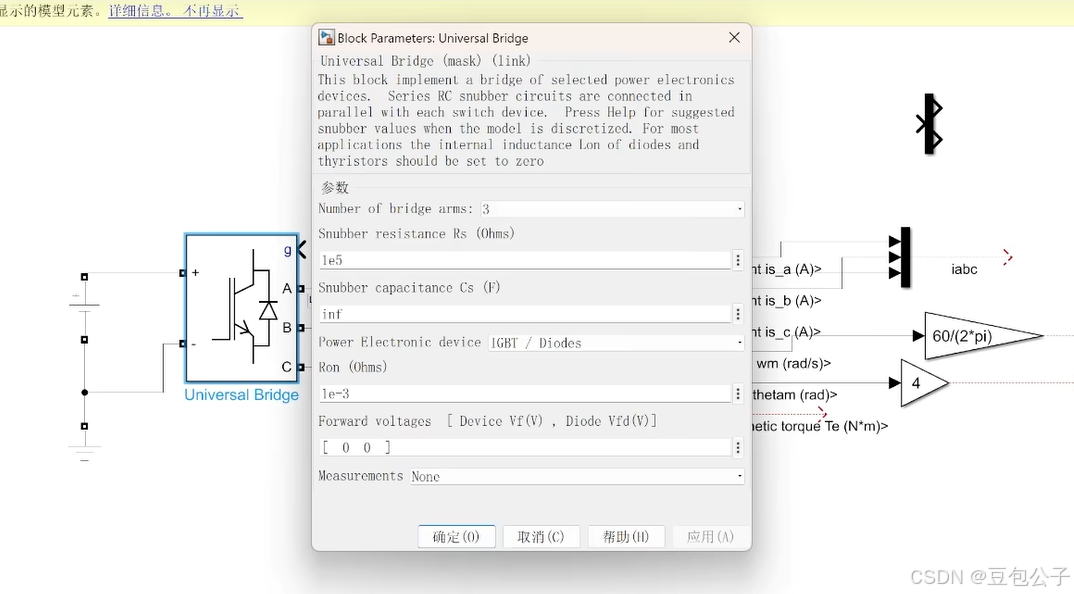
选取逆变桥模块(Universal Bridge),并对其进行设置,选取IGBT,右键单击模块-格式-翻转模块-左/右;
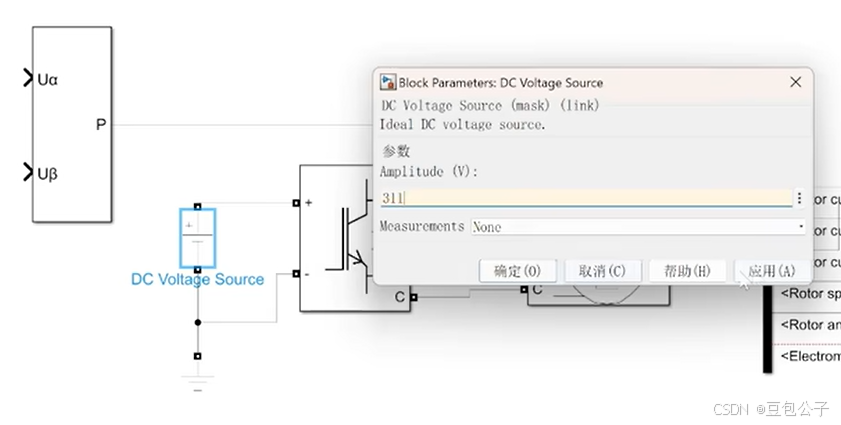
左边为母线电压-选取DC Voltage Source,配置母线电压的值-311V;再加上接地-Ground。添加powergui模块。
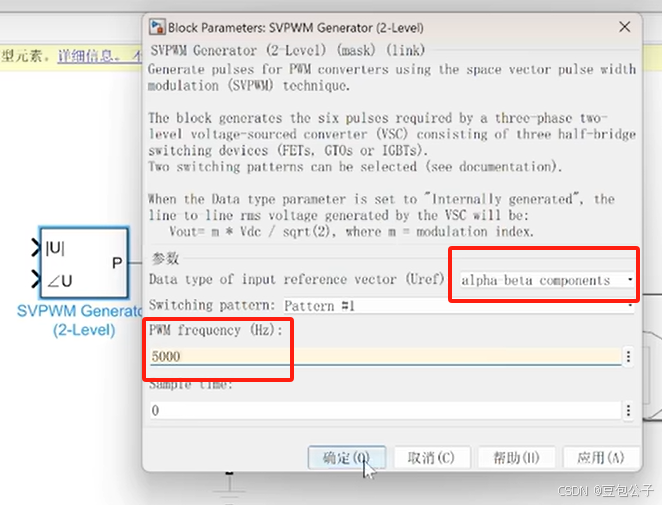
选取SVPWM模块,配置参数--控制周期5000,matlab自带的SVPWM模块没有母线电压(这是一个标幺化的值),在dq与Alpha-Beta间加上一个增益(sqrt(3)/311)来解除
选取反park变换模块(dq to Alpha-Beta-Zero),dq处用MUX引出3个,demux模块引出;wt周期部分,常数模块(constant),积分模块(Integrator);dq轴直接给定制
注:在模型复杂后,仿真会变慢,修改建模-模型设置-求解器类型修改为定步长,求解器-ode3;步长<采样周期<控制周期 且最好是整数倍关系;
注:封装技巧---以增益为例
选中增益,按住ctrl+G ;就将其进行了一个封装;
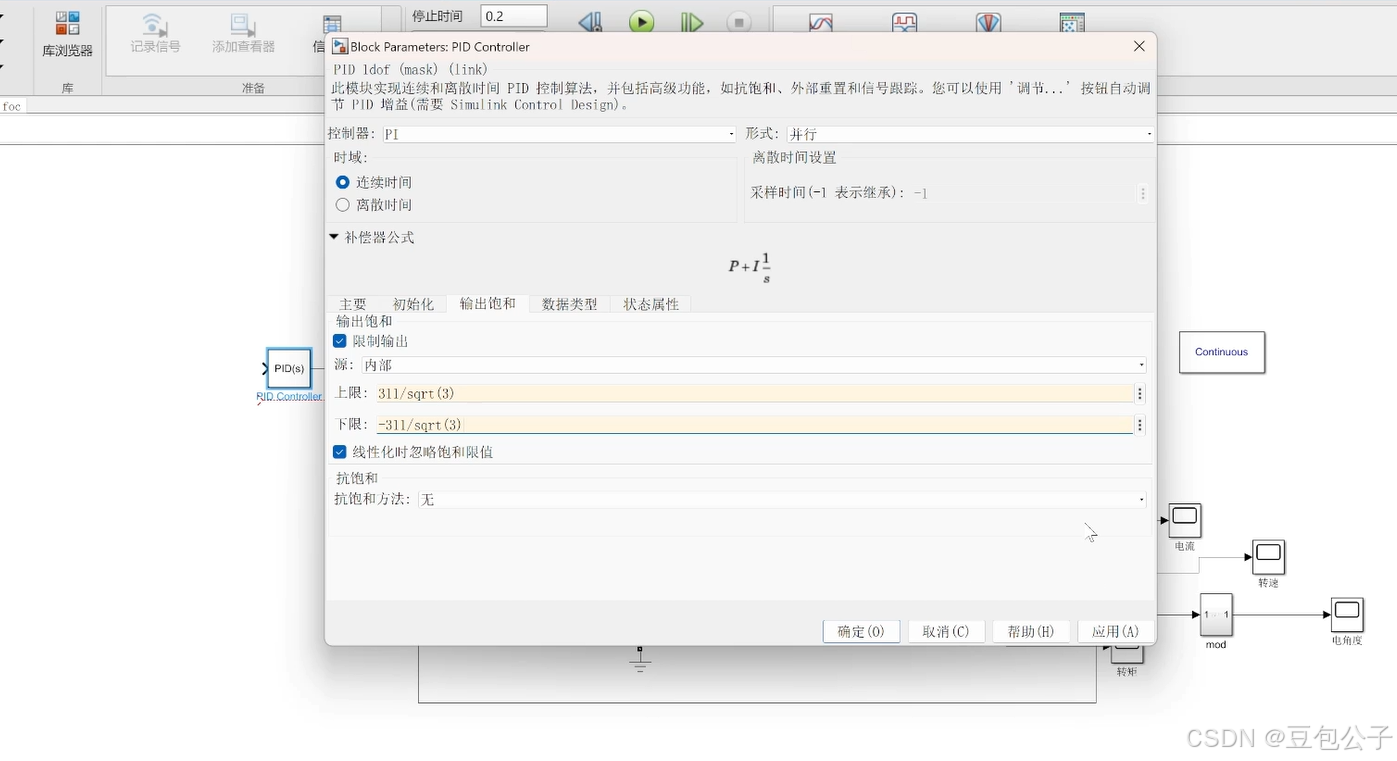
电流环的搭建
添加PID模块(PID Controller);选择pi,KP,KI暂时不设置,设置输出饱和-进行限幅输出-311/sqrt(3),与母线电压有关
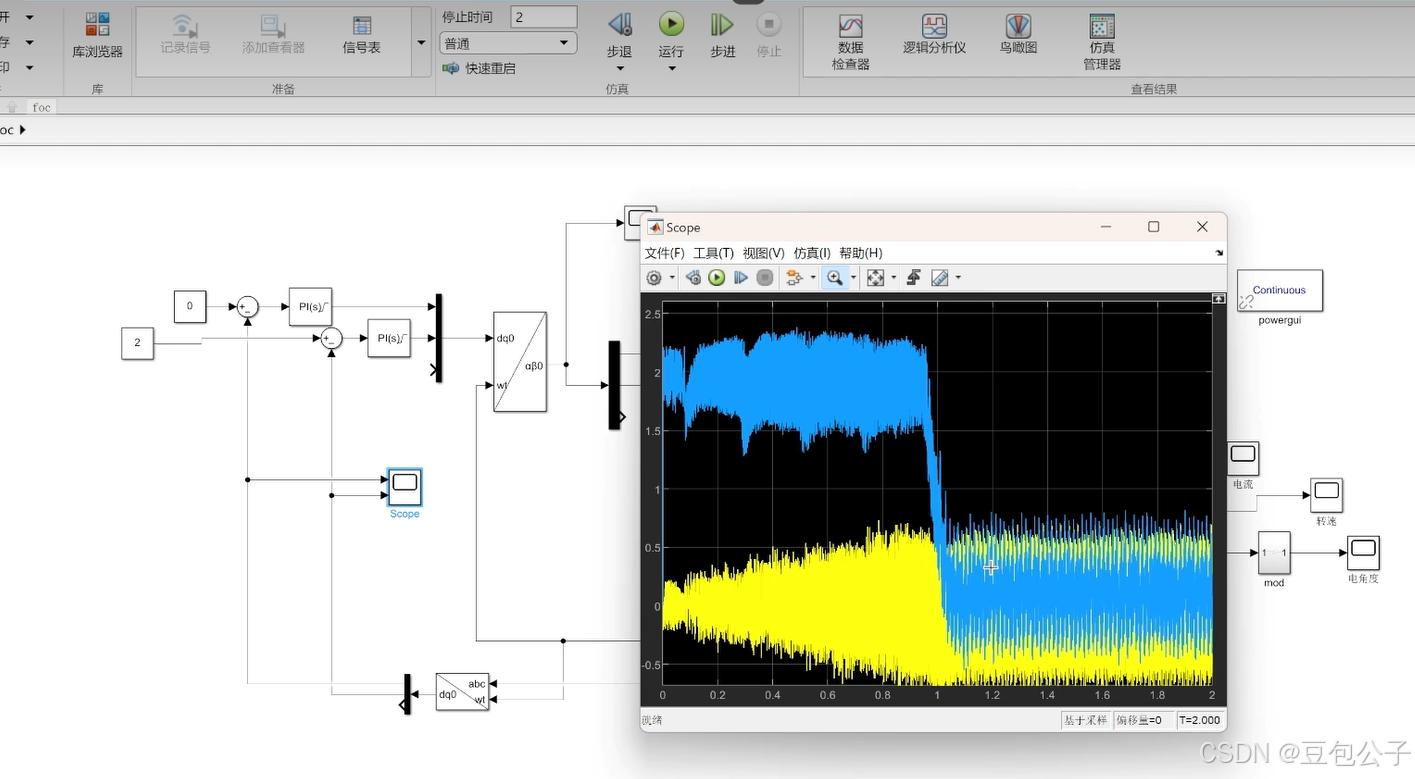
再添加一个SUM模块,作为给定信号与反馈信号的一个比较器;添加park模块(abc to dp),翻转一下(快捷键-ctrl+r-翻转90°),添加一个转矩常数-暂时给0,连接各个信号,ID=0,IQ=2;
调节KP=50,KI=2000(随便调),仿真时间加到2s,进行仿真调试;可以看到,转速到达一定后,就平稳,上不去了---由于电压已近到达一个限幅值,要再大就要进入非线性调节的区域了;电流IQ可以看到,由于电压被反电动势拉了下去,IQ也起不来了。
转速环的添加
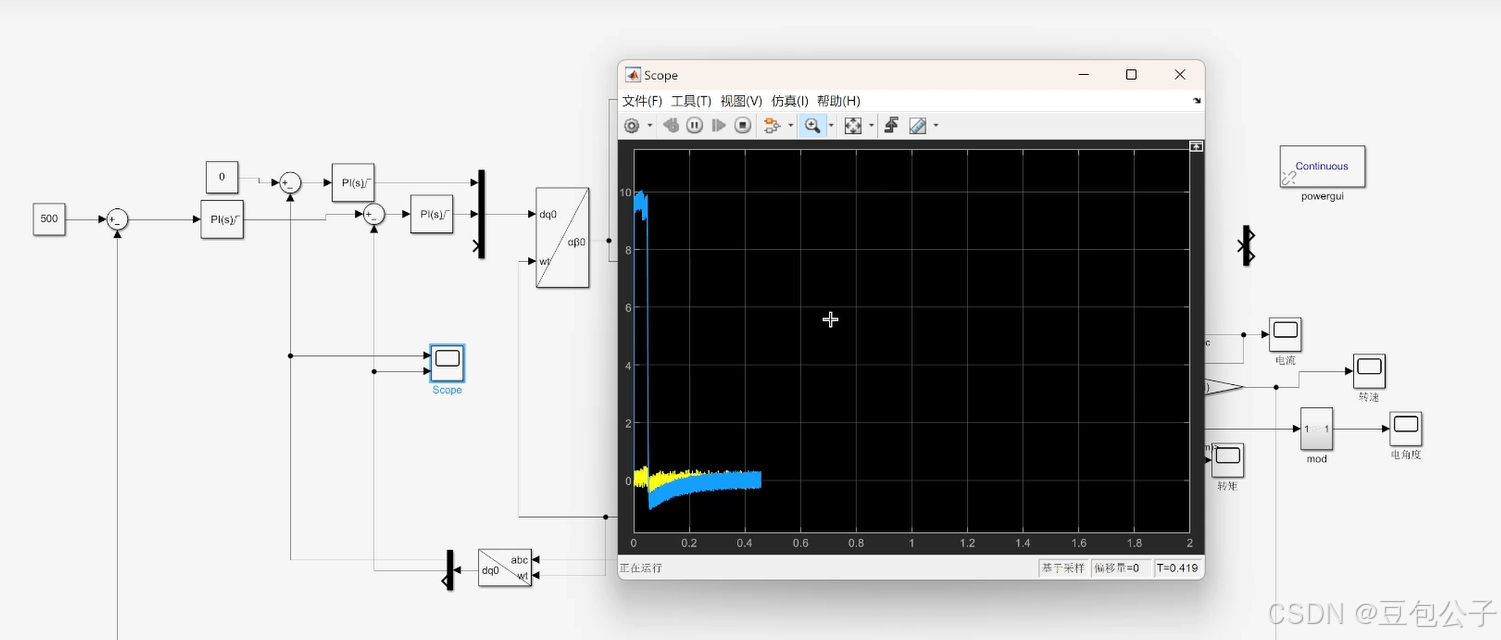
再添加一个PID模块,转速给500(其单位取决于反馈速度的单位),并对其PID进行限流(10A),KP=0.5,KI=10(大概的调一下,主要是实现整体架构);后续再对各个模块实现的原理与参数的选取进行说明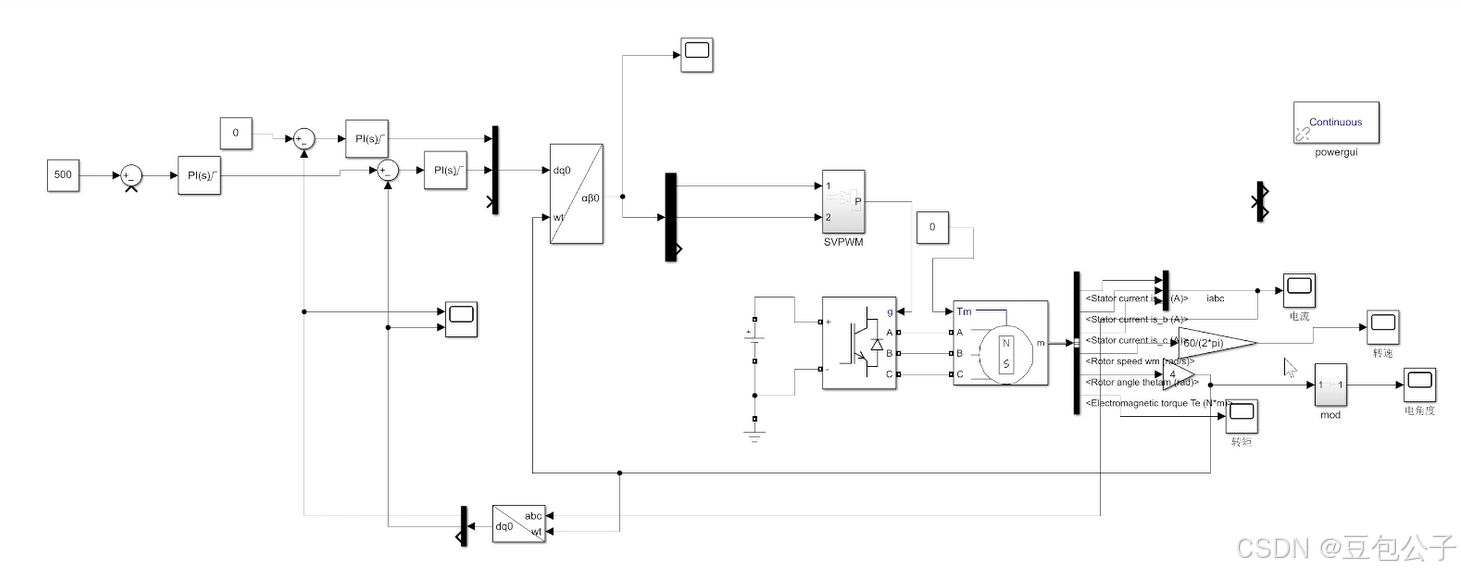
补充:
提取信息模块:Bus Selector模块来提取
合成信息:

















 2127
2127

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









