







汽车内部有大量的ECU(电控单元),ECU和ECU是要通信的,这就需要用到CAN总线。使用CAN总线避免了各个ECU之间复杂的连接线束。
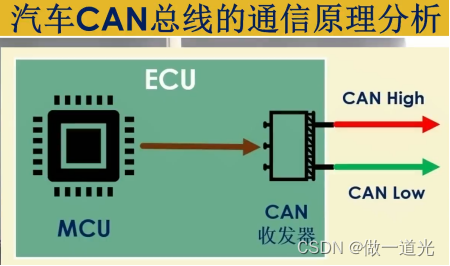
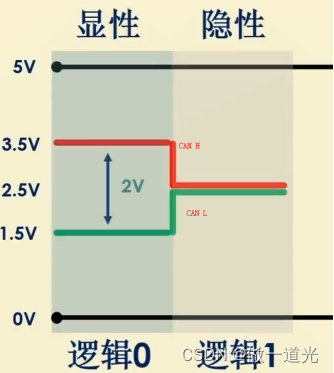
CAN控制器和CPU集成在一起形成一个单独的电子元件MCU。MCU和CAN收发器进行连接,MCU根据应用的逻辑信号0、 1转变成普通的低电平、高电平。0是低电平(显性),1是高电平(隐形)。CAN收发器把普通的电平变成两根导线的差分电平,通过CAN H和CAN L发送出去。
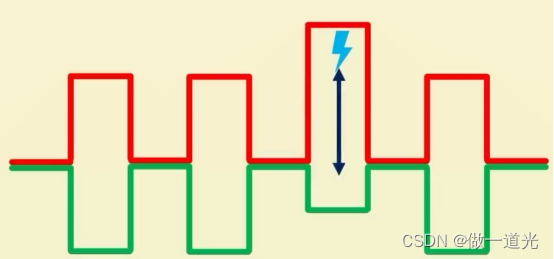
使用CAN高和CAN低两根线来发送信号,不易受外界电磁等原因的干扰,
一旦受到影响CAN高和CAN低的电压就都发生同样的变化,电压差还是保持不变的,因此不影响CAN信号的解析。



















 1749
1749

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











