







【系统简介】
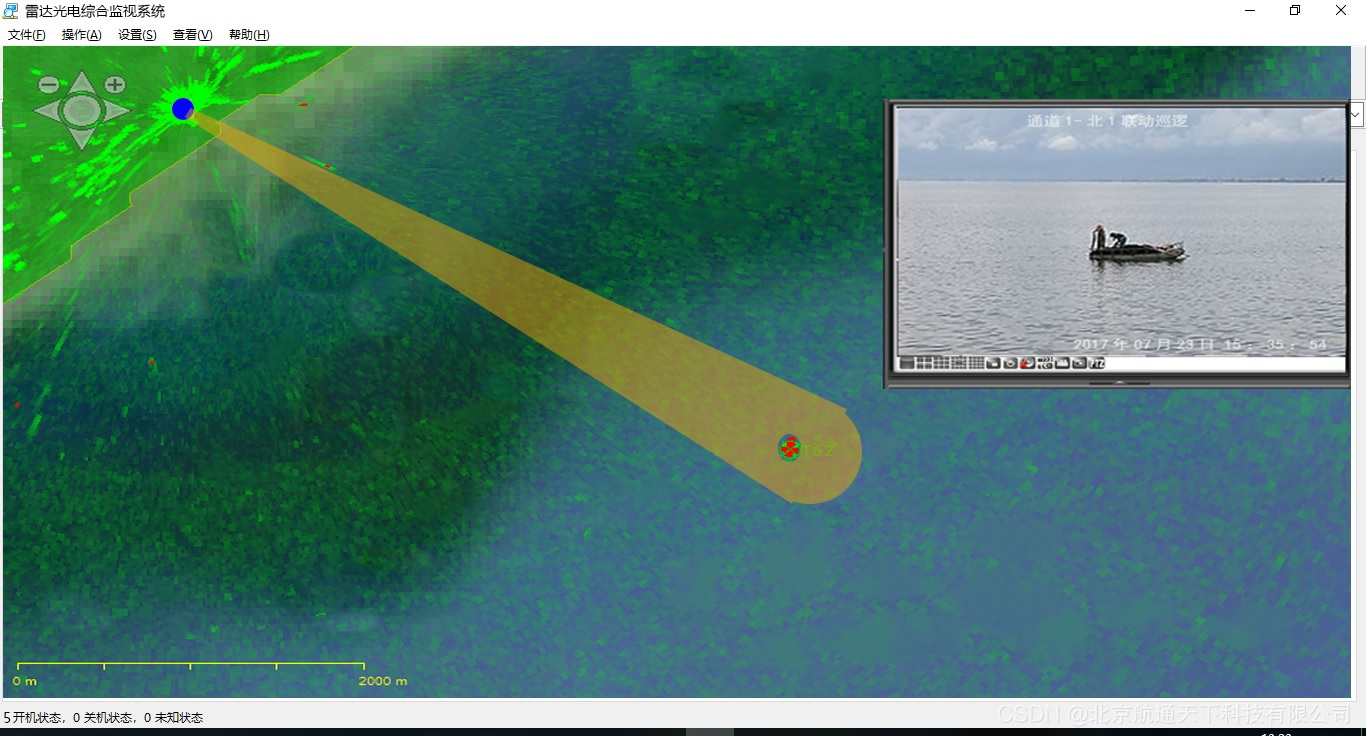
信天翁系统采用雷达和光电设备组合监视,综合雷达与光电设备的优势特点,形成了雷达光电一体的综合化监视系统。该系统能够对大面积水域进行昼夜全方位精确监视,当有目标侵入时,雷达会及时发现并自动引导摄像头跟踪拍摄。
雷达探测范围广,不受环境、光线等条件影响,能精确快速发现入侵目标,并报告其位置、速度、航向等信息,但是对于非专业人员来说,雷达视频的显示抽象不直观。光学设备对目标的显示非常直观,但因观察范围有限,易受天气光线条件等影响,视频分析的误报率高等缺点,不适宜对安保要求严格的场景。
结合雷达和光电设备的优点,利用我们领先的雷达处理、目标追踪、信息融合、视频联动、远程通信技术研发出一套综合化远程雷达与视频联动监视系统。系统大大提高了对目标搜索、追踪、监视、报警的能力。
【系统特点】(基础版)
- 全固态雷达。系统前端采用全固态雷达,其优点是辐射功率小、工作寿命长、反应时间短、可靠性高、探测距离远、抗干扰能力强。避免了传统磁控管雷达需要定期更换器件、辐射功率高对周边环境和人体有影响的问题。
- 探测范围广。大型船只可达30km,小型渔船超过5km。
- 环境适应性强。能够在夜间、雨雪雾霾、大风沙尘等极端环境下正常工作。
- 视频联动(Slew to Cue)。雷达发现目标后,自动引导摄像头连续跟拍,使目标无所遁形。
- 自动报警。系统内置了一系列智能报警逻辑,如:目标区域入侵警报,门限通过警报,目标间或与限定地点间的进近警报等。同时,系统可产生声光警报或向其他子系统发送信息,如安保人员的手机、远程监控平台等。
- 算法强大。监视系统软件先进的雷达信号处理算法可以同时追踪多达500个目标,并记录轨迹。
- 雷达组网。支持多部雷达、多个摄像头组网,无缝覆盖安保区域。
- 运行保障。系统可以远程配置前端雷达参数。

【系统特点】(加强版)
- AIS数据融合。
- 电子海图叠加显示。支持S-57和S-63。
- 增强视景。可将目标的雷达、AIS等信息,如目标ID,速度、航向等,实时的显示在摄像机视频图层上,为管理员提供实时直观的监控画面。当目标船舶IMO和MMSI信息可用时,系统可从网络或本地数据库中索引到该船舶的照片,据此快速核验目标的身份。

- 雷达视频可以在视频管理系统(VMS)上显示和操作。

【雷达性能】
| 雷达架构 | 组件 | 雷达基座、天线、电缆、RI-12接口模块 |
| 环境适应性 | 工作温度 | -25~+55(-13°F~131°F) |
| 相对湿度 | IEC60945 | |
| 冲击和振动 | IEC60945 | |
| UV | IEC60945 | |
| 相对风速 | 风速达到70节,天线转速48rpm时,仍可正常工作 | |
| 防水 | IPX6 | |
| 电源 | 电源功耗 | 最高可达180W(在最大风速时) 平均40W(零风速时) 雷达天线和RI-12待机模块的平均功率为6.5W |
| 输入电压 | 12V或24V DC | |
| 启动时间 | 从电源关闭到发射信号只需16~25秒 | |
| 物理尺寸 | 高度 | 427mm(包含天线) |
| 天线旋转直径 | 2045mm | |
| 组件重量 | 基座:18.75Kg 天线:6.5Kg RI-12: 1.6Kg | |
| 天线 | 发射机 | 固态模块的发射功率不会随着时间衰减 |
| 转速 | 24~48RPM(最速度大为70kts时,转速最小为20RPM) 由软件模块控制 | |
| 波束宽度 | 1.2°±10%(-3dB)或0.8°(开启波束锐化) | |
| 垂直波束宽度 | 25°±20% | |
| 极化方式 | 水平极化 | |
| 旁瓣抑制 | <-23dB(±10°之内),<-30dB(±10°之外) | |
| 发射频率 | X波段,9.410-9.495GHz | |
| 峰值辐射功率 | 25W±10% | |
| 噪声系数 | 5dB |
【雷达追踪服务器】
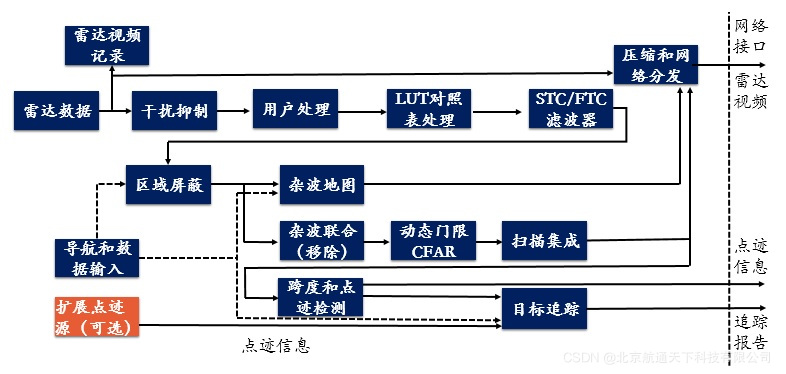
雷达追踪服务器提供雷达视频处理、网络分发、点迹提取和目标追踪功能,可以在Windows或Linux系统下运行。算法先进强大,能在复杂的海杂波条件下分析出目标。跟踪稳定,无论目标的大小或运动状态有多复杂,系统能稳定的追踪目标。
雷达原始视频可以压缩并分发到任意数量的客户端进行处理显示,也可以将处理后的结果,即跟踪目标,分发到客户端上。
技术规格:
| 点迹提取和跟踪 | 视频处理 | 峰值选择、子抽样、平滑、CFAR门限、增益控制、扫描集成,FTC,STC,偏置/增益调节。也支持用户自定义的模块 |
| 跟踪数量 | 无限制,通常可跟踪0~1000个 | |
| 目标速度 | 无限制,通常0~600kts | |
| 跟踪区域 | 可编辑的多边形区域,世界海岸线地图用于自动陆地遮挡 | |
| 目标提取 | 可编辑的提取标准(尺寸、形状、强度等),点迹合并 | |
| 跟踪过滤 | 自适应alaph-beta,多假设目标 | |
| 跟踪报告 | SPx或Asterix格式 | |
| 服务器控制界面 | 雷达显示 | 扫描转换视频+处理过的视频 |
| 底层地图 | 光栅格式 | |
| 点迹显示 | 点迹(位置、边界框) | |
| 追踪显示 | 追踪位置、标签、速度、航向等 | |
| 显示控制 | 完全支持雷达分析的可配置视图 | |
| 参数控制 | 所有处理参数均可动态控制 | |
| 可选功能 | 雷达记录 | 压缩和记录雷达视频到本地硬盘,采用ZLIB或ORC压缩格式,持续或定时压缩,追踪同时进行记录 |
| 网络分发 | 压缩和网络分发到多个客户端,可分发原始数据或处理后的数据 |
【系统架构】
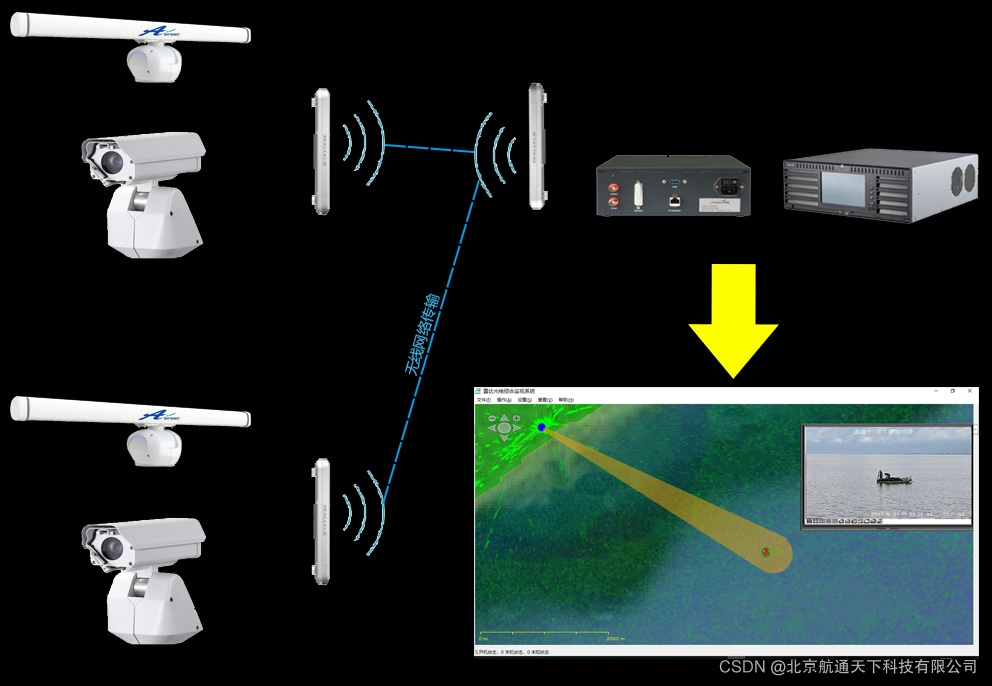
雷达系统:SIMRAD全固态网络雷达,负责探测监视区域内的目标。
视频云台:高清光电监视系统,负责对雷达探测的目标进行视频直观确认。
网络通信:前端雷达及光电设备的信息与处理服务器之间的数据通信。
雷达追踪:对前端雷达采集的信号进行处理,形成追踪目标。各种对雷达的复杂信号处理。 远程终端:显示雷达视频画面和光电视频画面,雷达与视频的联动,系统的各项设置。
【系统应用】
系统可以为政府职能部门(渔政、海监、海事局、海洋局)等管理部门提供所辖海域的船舶交通实时状况,对所有来往船只及作业船舶进行昼夜监视,提供监视船舶位置、速度及航迹数据;视频云台监视系统可以提供雷达追踪目标得监视图像。系统能够实时掌握巡逻船只的具体问题,指挥执法船只靠近非法入侵船只。系统改变了海域监控传统的管理方式和手段,对海域监控的自动化、网络化等方面将起到积极的推动作用,为执法提供原始依据。
系统可以对养殖区进行昼夜监视,提供非法入侵船舶的位置、速度及航迹数据;对于非法入侵的可疑船只发出预警,并通过视频图像确认。能够及时发现偷捕船只,减少经济损失。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









