







介绍
如果您正在制造无人机、遥控车或任何使用无刷直流(BLDC)电机的机器,您可能会遇到电机极数和电机Kv值的概念。这两个参数对于表征您的电机和估计其性能都很有帮助。
在本文中,我们将介绍这些指标的含义、如何计算和衡量它们,以及它们之间的关系。
目录:
- 如何确定无刷电机的极数?
- 什么是电机极?
- 电机极与极对?
- 电机极数和电机电速的关系?
- 如何计算电机极数(方程式)?
- 如何测量电机极数?
- 如何计算无刷电机Kv?
- 什么是电机Kv?
- Kv等级是什么意思?
- 如何测量计算 Kv(方程式)?
- 如何测量电机Kv?
- 电机极数与Kv的关系?
如何确定无刷电机的极数?
(1)什么是电机极?
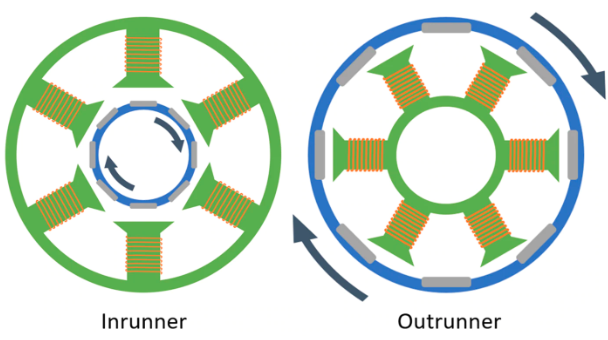
在无刷电机内,转子周围有许多磁铁(图 1)。这些磁铁也被称为电机的“磁极”。当电流传递到定子中的线圈时,转子开始转动,因为它的磁铁排斥类似的电磁铁。
在下图中,蓝色转子包含内转子电机(左)和外转子电机(右)中的永磁体。绿色定子固定电磁线圈。
内转子和外转子电机图:
(2)电机极与极对
转子内衬的磁铁各有自己的北极和南极,其中只有一个端面向定子并与定子相互作用。有相同数量的南北磁体面向转子,每组N和S磁体称为“极对”。
对于电机中的每个极对有两个极,因此如果电机有8个极/磁铁,则有4个极对。出于同样的原因,您几乎总是有一个偶数极数(2、4、6、8等),因为每个磁铁都需要一个相反的磁极。即:
- 2极电机→ 1个北极磁体和1个南极磁体→ 1个极对
- 8极电机→ 4个北极磁体和4个南极磁体→ 4个极对
(3)电机极数与电机电速的关系
电机的速度与转子的极数成反比。该关系由以下公式解释:
电机极数方程速度=2频率60/极数
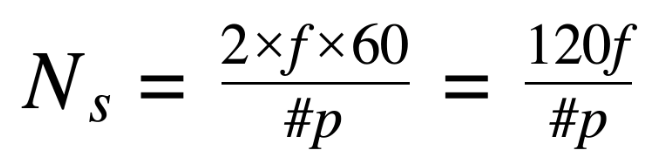
或者,它可以写成:
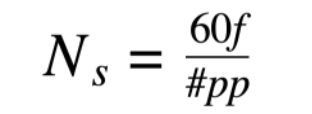
极对数公式速度=60*频率/极对数
(4)如何计算电机极数?
由于磁极数等于转子中永磁体的数量,因此确定磁极数的最简单方法是手动计数磁体。如果你能看到你的电机或者你能拆下外壳,这是可能的。如果您无法卸下外壳,这可能是一项具有挑战性的任务,因为磁铁可能非常小且数量众多。
计算电机极数:

现实中人们已经发现了其他更为简单的办法,例如在转子周围挥动磁铁以查看吸引和排斥发生的位置。这种方法对于磁铁位于定子外表面附近的外转子电机最为可行。如果您尝试这种技术,请小心,因为转子内的磁铁可能会受到更强磁铁的影响而消磁。
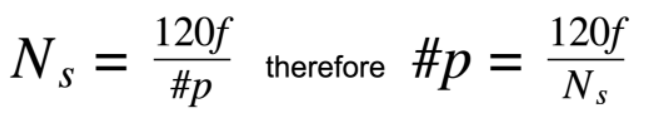
另一个需要更多努力和设备的选择涉及通过实验找到电机速度和电源频率,然后重新排列下面的等式以求解电机极数:
电机极数公式极数=120*频率/速度
要测量您的电机速度,您将需要一台设备来反向驱动您的电机(例如钻头),以及一个用于测量旋转次数的转速测量设备,例如转速表。您还需要一个设备来测量产生的反电动势的频率,例如示波器。同时测量速度和频率,然后将值输入到上面的等式中以确定电机的极数。
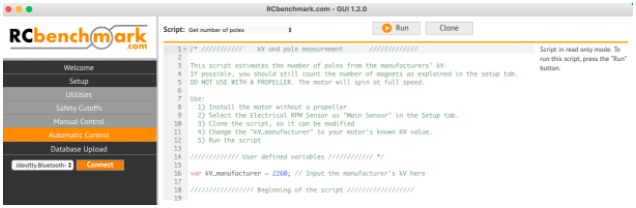
(5)如何测量电机极数?
也许测量电机极数的最简单方法是让测试台为您确定它。
我们的几个测试台都带有用于计算电机极数的自动、预先编写的脚本,包括1520系列和1580系列。
只需在脚本中输入电机的Kv额定值,然后将电机安装在测试台上(没有螺旋桨,因为电机将全速运行)运行自动测试。
测试完成后,该软件将为您提供电机的极数,这只需几分钟。
计数电机极数 bldc:
如何计算无刷电机Kv值?
(1)无刷电机的电机Kv值是多少?
电机Kv值提供了一种描述无刷电机在空载条件下的峰值电压和转速之间关系的方法。Kv值的单位是RPM/V,可以通过将空载电机的转速除以施加的电压来估算。
事实上,我们应该考虑的电压实际上是反电动势(EMF),而不是施加的电压。
在无刷电机中,反电动势(EMF)是与电源提供的电流方向相反的电压,由线圈通过电机中的磁场移动而感应。这可以用法拉第定律来解释,它表明在磁场中移动的线圈会在线圈内产生电流,称为电压或电动势。
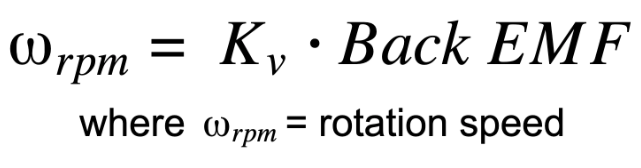
当电机转动时,产生的反电动势与转子的速度成正比:随着RPM的增加,反电动势也会增加。在空载全油门时(忽略电机自身惯性),我们可以用这个公式来描述关系:
Kv方程速度=Kv*反电动势
(2)Kv等级是什么意思?
Kv额定值提供了对电机每施加一伏电压将经历多少转的估计。该评级有助于比较物理尺寸相同但由于其内部工作原理而具有不同性能特征的电机。
一般来说,随着线圈中绕组数量的增加,电机的Kv值会降低。从机械上讲,低Kv值电机具有更多的细线绕组,细线在较低电流下承载更多伏特。高Kv值电机的绕组更少,但电线更粗,可以用更少的电压承载更高的电流。下一节中的方程式提供了这个概念的数学演示。
应用于无人机时,低Kv值电机倾向于以较低的RPM运行并产生更大的扭矩,非常适合大型螺旋桨和大型无人机。高Kv值电机以更高的RPM运行,是低扭矩、小型和快速旋转螺旋桨的理想选择。因此,较轻、快速移动的无人机(例如四轮赛车)最好使用高Kv值电机,而较重、移动较慢的无人机最好使用低Kv值电机。
小型无人机电机与大型无人机电机的磁极:

而Foxtech Gaia 190MP重型无人机使用100 Kv值电机
另一个实际应用是内转子和外转子电机。内流道的Kv值通常高于相同尺寸的外流道。外转子中转子的较大直径允许使用更多的永磁体。更多的磁铁(磁极)→更低的速度→更低的Kv。内流道的小直径也意味着它具有更小的圆周来覆盖一圈,因此对于相同的电压有更多的旋转。
值得注意的是,Kv并不是评估电机性能的明确方法,因为电机品牌也会影响其效率。对于相同的Kv值,一个品牌的电机可能比另一个品牌的电机性能更好或更差,这只能通过测试来发现。
(3)如何计算电机Kv值?
如果我们回到之前的公式:电机转速方程
![]()
我们可以也可以重新表达为:电机Kv方程
Kv=速度/反电动势
![]()
要近似Kv, 您可以将“反电动势”与方程中的输入电压交换,这将为您提供电机Kv的一个很好的估计。
为了获得更准确的估计,您可以测量电路中两条引线之间的电压以获得均方根(RMS)电压,然后将其乘以1/sqrt( 2)或0.7071以获得峰值电压,您可以将其插入这个等式:
电机Kv公式Kv=转速/峰值电压*0.95
0.95是一个考虑与理论模型的偏差的值,以提供更接近实验观察到的值。Kv计算中普遍接受该因子。
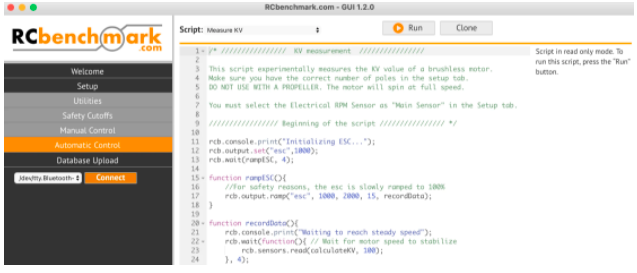
(4)如何测量BLDC Kv?
通过实验测量Kv可能是准确了解电机真实Kv的最佳方法。我们经常观察到我们测试过的电机的规定和测量Kv之间的差异,您也可能会观察到这些差异。
我们在我们的RCbenchmark软件中提供了一个预先编写的脚本,允许您通过空载测试运行电机来实验性地测量Kv。
您所要做的就是将您的电机连接到RCbenchmark测试台,在“设置”选项卡中输入电机极数,然后运行测试(不使用螺旋桨)。测试完成后,软件将自动计算您电机的Kv。
即使您的电机标有Kv等级,测试它以查看实验值Kv是否与广告中的相符也会很有意思。
电机极数和Kv值之间的关系
如前所述,电机Kv和极数都与电机的转速/RPM有关。我们知道,随着转速的增加,Kv值也会增加。或者,更多的极数对应于以较低转速运行的电机。
因此,电机极数与Kv值之间的关系是反比的。当我们实际考虑它时,这是有道理的。
- 具有更多极数的大型电机将需要高扭矩并以低运行速度运行。因此,所使用的电机将具有大量极数和低Kv值。
- 具有较少磁极的较小电机将以高转速运行并产生相对较低的扭矩。因此,电机将具有低极数和高Kv值。
结论
本文介绍的概念,无刷电机极数和电机Kv值,是理解BLDC电机特性和性能的两个关键概念。了解如何解释这些数字可以帮助您为无人机或电动飞机选择最佳电机,并提高您的性能和效率。效率与飞行时间、有效载荷和航程直接相关,因此这些信息非常有价值。
如果您希望能够自动测量电机的极数和电机的Kv, 我们建议您查看1520系列拉力支架和1580系列测试支架。如文章中所述,他们的软件带有预先编写的脚本,用于自动计算这两个值。节省您宝贵的时间,同时提供更多机会来表征您的电机。

















 1183
1183

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









