







目录
1.1、Actuator Controls FFT --执行器控制FFT
1.2、Acceleration Power Spectral Density--加速度功率谱密度
2.3.1、步骤1:调整低通滤波器--IMU_GYRO_CUTOFF
2.3.2、步骤2:调整D 项滤波器--IMU_DGYRO_CUTOFF
无人机震动/振动分析,使用 Flight Review 行进日志分析无人机震动,无人机振动参数查看及分析。
参考:Log Analysis using Flight Review | PX4 Guide (v1.15)
1、振动分析(飞行日志中)
振动是多旋翼飞行器最常见的问题之一。高振动水平会导致:
- 飞行效率降低和飞行时间缩短
- 电机会发热
- 材料磨损增加
- 无法将飞行器调得严密,导致飞行性能下降。
- 传感器削波
- 位置估计失败,可能导致飞走。
因此,密切关注振动水平并在需要时改进设置非常重要。
存在一个明显能判断振动水平过高的临界点,而且一般来说,振动水平越低越好。然而,在 “一切正常” 和 “振动水平过高” 之间存在一个较宽泛的范围。这个范围取决于许多因素,包括飞行器的大小 —— 因为较大的飞行器具有较高的惯性,能够进行更多的软件滤波(同时,较大飞行器的振动频率较低)。
以下段落和章节提供了关于使用哪些图表来检查振动水平以及如何分析这些图表的信息。
提示
在分析振动时,值得查看多个图表(不同的图表可以更好地突出一些问题)。
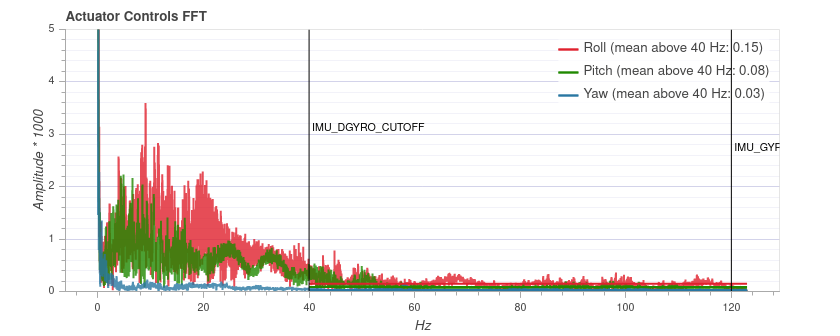
1.1、Actuator Controls FFT --执行器控制FFT
信息
您需要启用高速日志记录配置文件 (SDLOG_PROFILE) 才能看到此图。
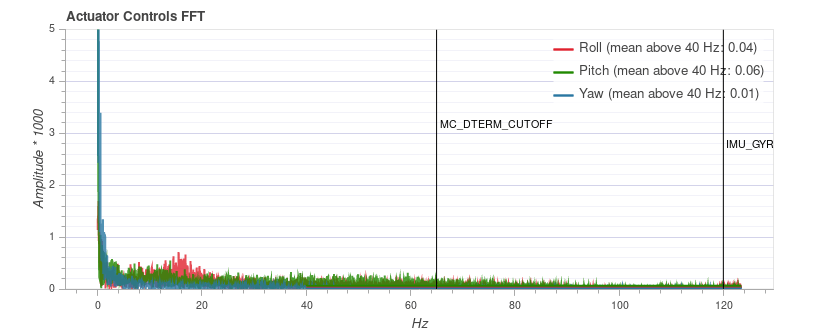
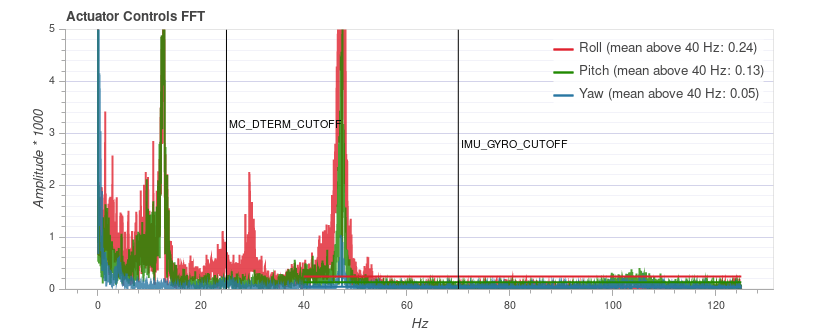
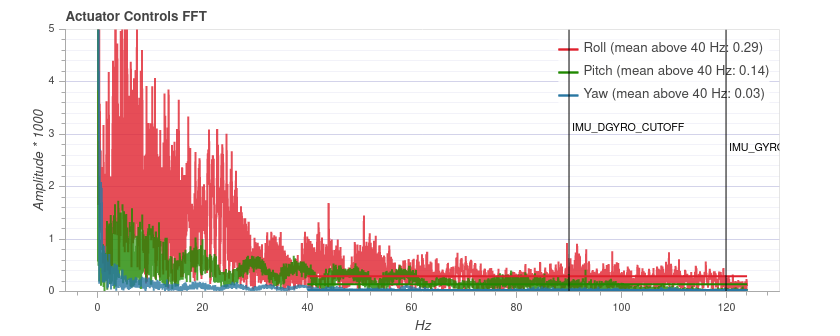
此图表展示了基于执行器控制信号(速率控制器的 PID 输出)的横滚、俯仰和偏航轴的频率图。它有助于识别频率峰值并配置软件滤波器。在最低频段(大约 20 赫兹以下)应该只有一个峰值,其余部分应该较低且平稳。
请注意,不同飞行器的纵轴刻度是不同的,但来自同一飞行器的日志可以直接相互比较。
示例:良好的振动
QAV-R 5“ Racer 框架(振动情况极佳)。展示低振动的 QAV-R 5 英寸竞速机架的 FFT 图
信息:
上述机架极佳的振动特性意味着我们可以大幅提高软件滤波器的截止频率(减少控制延迟)。
DJI F450 框架(振动良好)。展示低振动的 DJI F450 机架的 FFT 图
S500 框架:展示低振动的 S500 机架执行器控制的 FFT 图
信息:
虽然上面的图表看起来不错,但同一次飞行的原始加速度图显示,x 轴和 y 轴的振动水平有点高。这是一个很好的例子,说明了为什么查看多个图表是有价值的!
示例:不良振动
此示例显示了接近 50 Hz 的频率峰值(在这种情况下是由于起落架 “松动” 造成的)。
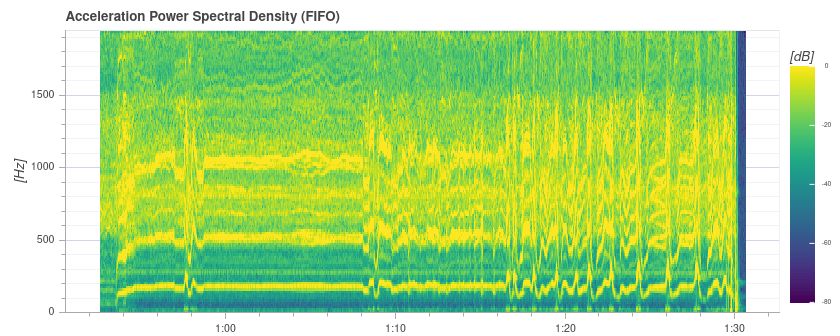
1.2、Acceleration Power Spectral Density--加速度功率谱密度
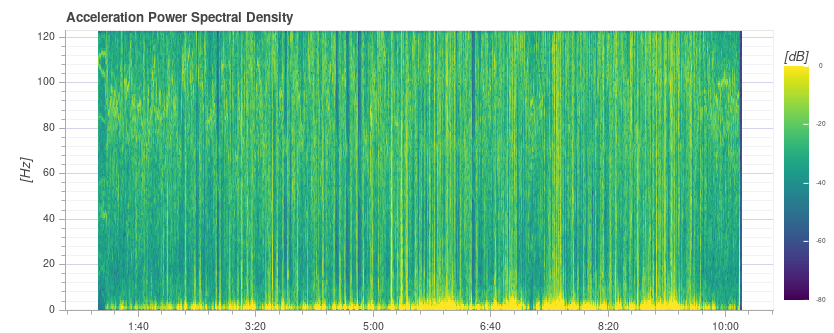
这是一个二维频率图,展示了原始加速度计数据随时间的频率响应(它显示了 x、y 和 z 轴的总和)。一个区域的颜色越黄,在该时间和频率下的频率响应就越高。
理想情况下,只有最低到几赫兹的部分是黄色的,其余的大部分是绿色或蓝色。
示例:良好的振动
QAV-R 5“ Racer 框架(出色的振动)。展示低振动的 QAV-R 5 英寸竞速机架的频谱密度图
DJI F450 框架(振动良好)。展示低振动的 DJI F450 机架的频谱密度图
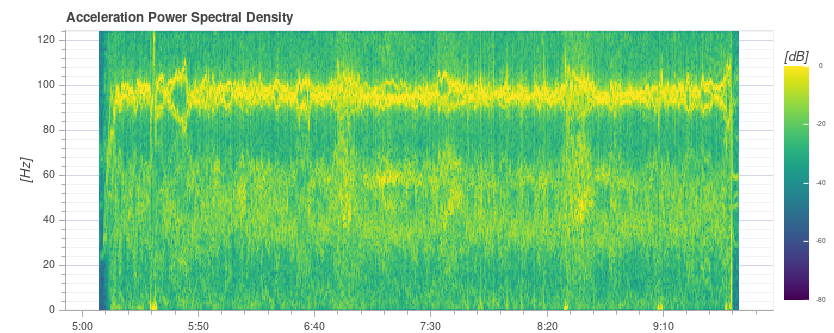
信息
在上面,您可以看到螺旋桨的叶片通过频率约为 100 Hz。
S500 框架:展示 S500 机架的振动频谱密度图
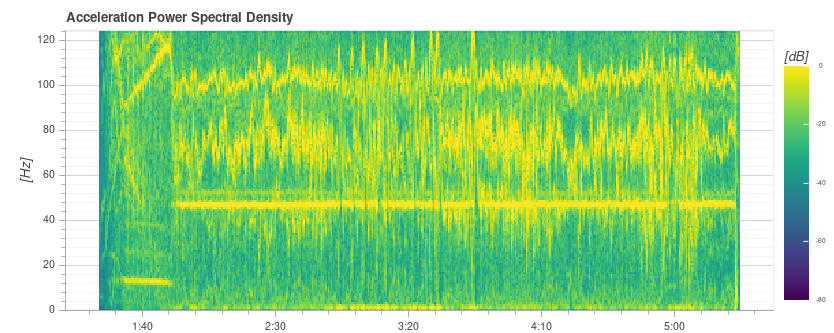
示例:不良振动
在大约 100 赫兹处的强烈黄色线条表明存在一个潜在问题,需要进一步调查(首先查看其他图表)。
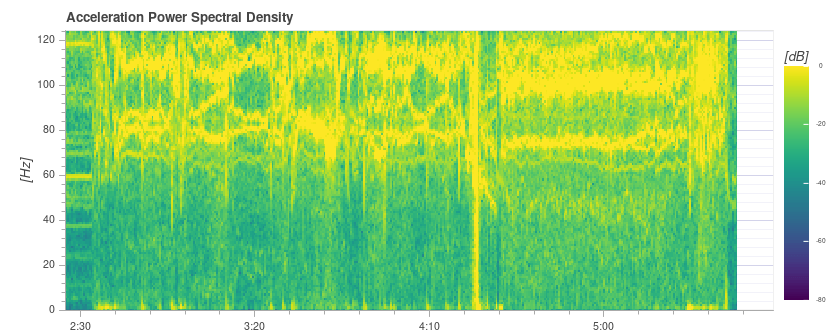
下图显示了接近 50 Hz 的频率峰值(在本例中是由于“松动”的起落架)。
提示:
这表明可能存在问题,因为这是一个强烈的单一低频,接近飞行器的动态频率。使用默认的 80 赫兹滤波器设置,50 赫兹的振动将不会被过滤掉。
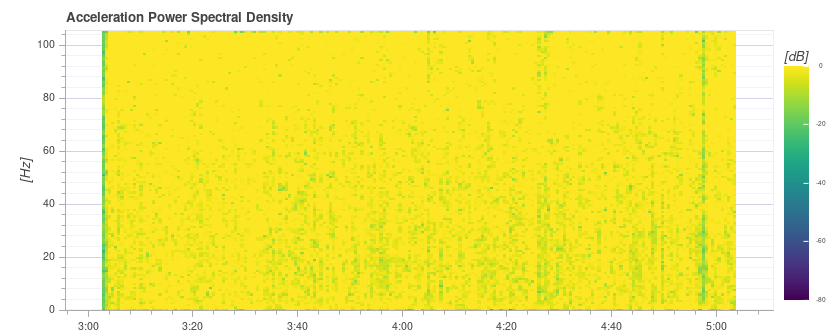
极高(不安全)的振动!请注意,该图表几乎完全是黄色的。
警告
您不应该在如此高的振动水平下飞行。
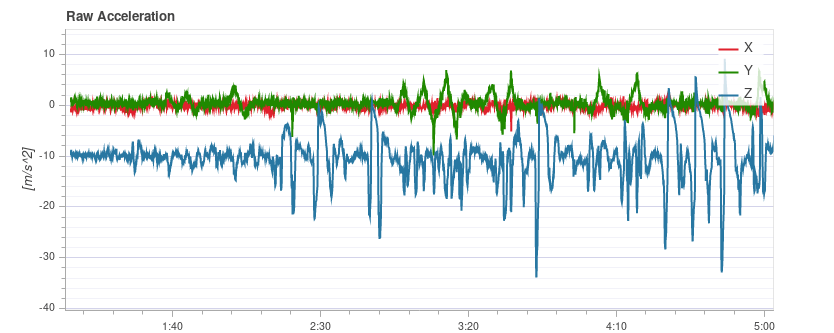
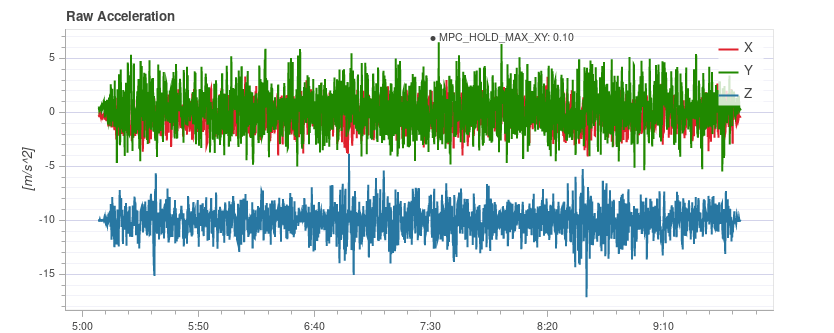
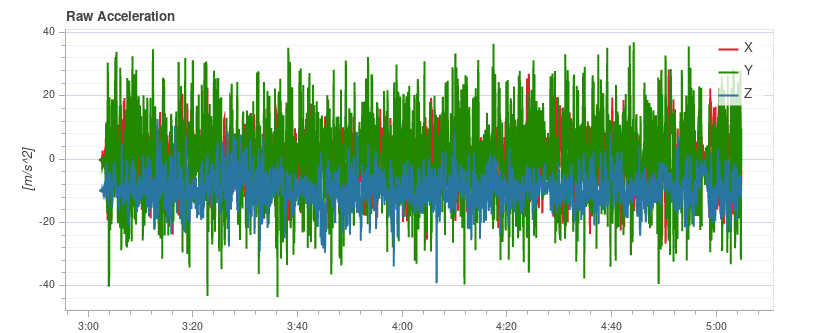
1.3、Raw Acceleration --原始加速度
此图表显示了 x、y 和 z 轴的原始加速度计测量值。理想情况下,每条线都很细,并且清楚地显示飞行器的加速度。
根据经验,如果 z 轴图在悬停或慢速飞行期间接触 x/y 轴图,则表示振动级别过高。
提示:
使用此图表的最佳方法是放大到飞行器悬停的部分。
示例:良好的振动
QAV-R 5“ Racer 框架(出色的振动)。展示低振动的 QAV-R 5 英寸竞速机架的原始加速度图
DJI F450 框架(振动良好)。展示低振动的 DJI F450 机架的原始加速度图
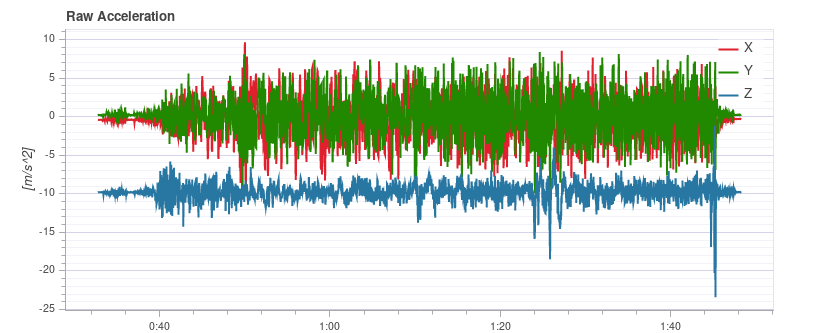
示例:不良振动
S500 框架。振动水平接近临界值 ——x 轴和 y 轴的振动有点高(这对于 S500 机架来说是比较典型的)。这已经达到了开始对飞行性能产生负面影响的极限。
展示 S500 机架 x、y 轴接近临界值的振动的原始加速度图
振动过高。请注意 z 轴的图形如何与 x/y 轴图形重叠:
展示起落架振动的原始加速度图
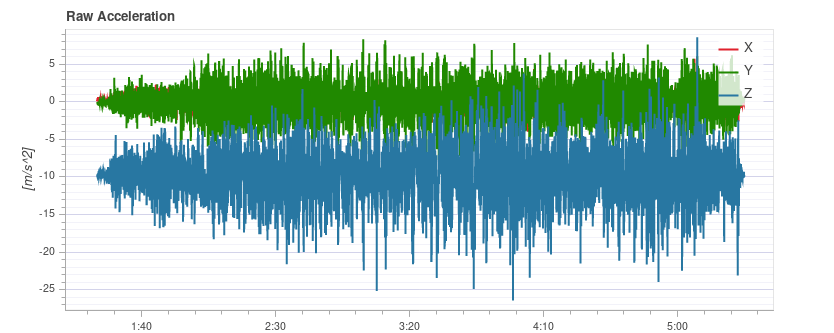
振动水平过高。请注意 z 轴的图形如何与 x/y 轴图形重叠:
展示原始加速度图中的高振动情况
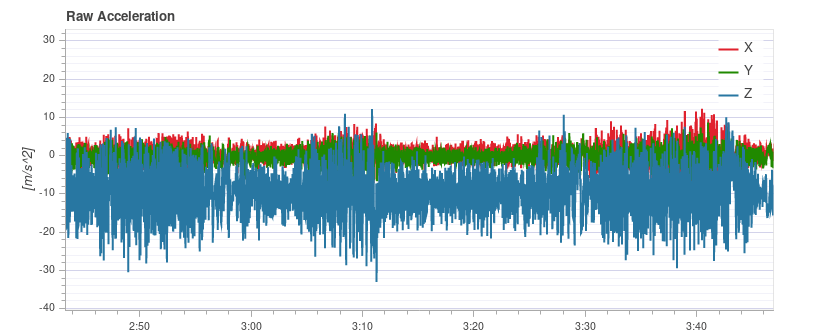
非常高(不安全)的振动水平。
警告
您不应该在如此高的振动水平下飞行。
1.4、原始高速 IMU 数据图
为了进行深入分析,可以选择以全速率(几 kHz,取决于 IMU)记录原始 IMU 数据。这允许检查比正常记录高得多的频率,这在选择振动支架或适当配置低通和陷波滤波器时会有所帮助。
要使用它,需要更改一些参数:
-
将 IMU_GYRO_RATEMAX 设置为 400。这可确保原始传感器数据在从传感器发送到系统的其余部分时得到更有效的打包,并减小日志大小(不减少有用的数据)。
-
使用好的 SD 卡,因为 IMU 数据需要高记录带宽(如果记录速率过高,Flight Review 将显示丢失)。
提示
有关常用 SD 卡的比较,请参阅 记录 > SD 卡。
-
在 SDLOG_PROFILE 中启用 gyro 或 accel 高速 FIFO 配置文件,并禁用其余条目。如果您使用的是非常好的 SD 卡(很少/没有丢失),您可以:
- 要么同时启用 Accel 和 Gyro 配置文件
- 或启用 Accel/Gyro Plus 默认日志记录配置文件
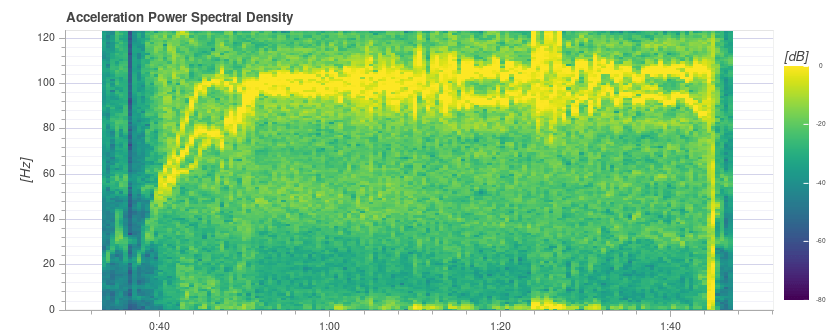
示例图:展示高速率加速度功率谱密度图
信息
记录第一个 IMU 的数据,这不一定与用于飞行的 IMU 相同。这仅在 IMU 安装方式不同的情况下(例如,硬安装与软安装)才重要。
信息
测试后不要忘记恢复参数。
2、修复振动问题
通常,仅从日志中无法确定振动源(或多个振动源的组合)。
在这种情况下,应该检查飞行器。隔振 解释了一些你可以检查(并采取)的基本事项,以降低振动水平。
2.1、基本振动修复(最主要的消除振动方式)
一些可以减少振动的简单步骤是:
- 确保所有东西都牢固地固定在无人机上(起落架、GPS 桅杆等)。
- 使用平衡螺旋桨。
- 确保螺旋桨、电机、ESC 和机身使用高质量的组件。这些组成部分中的每一个都可以产生很大的不同。
- 使用隔振方法安装自动驾驶仪。许多飞行控制器都带有可用于此目的的安装泡沫,而其他飞行控制器则具有内置的隔振机制。
- 作为最后的措施,调整软件过滤器。最好减少振动源,而不是在软件中过滤掉它们。
2.2、滤波器调校概述
作为最后的措施,调整软件过滤器。最好减少振动源,而不是在软件中过滤掉它们。
参考:MC滤波器调谐和控制延迟 |PX4 指南 (v1.15)
- 陀螺仪传感器数据上的低通滤波器。可以使用
IMU_GYRO_CUTOFF参数进行配置。 - 微分(D)项上的单独低通滤波器。微分(D)项最容易受到噪声影响,而略微增加的延迟不会对性能产生负面影响。因此,微分(D)项有一个可单独配置的低通滤波器
IMU_DGYRO_CUTOFF。
为了降低控制延迟,我们需要提高低通滤波器的截止频率。下面大致估算了提高IMU_GYRO_CUTOFF截止频率对延迟的影响:
| 截止频率(赫兹) | 近似延迟(毫秒) |
|---|---|
| 30 | 8 |
| 60 | 3.8 |
| 120 | 1.9 |
然而,这是一种权衡,因为提高IMU_GYRO_CUTOFF截止频率也会增加输入到电机的信号噪声。电机上的噪声会产生以下后果:
- 电机和电子调速器(ESC)可能会发热,甚至到损坏的程度。
- 由于电机不断改变速度,飞行时间会缩短。
- 会出现明显的随机小抖动。
对于存在显著低频噪声尖峰的配置(例如,由于旋翼桨叶通过频率处的谐波),在信号传递到低通滤波器之前,使用陷波滤波器来净化信号会有所帮助(这些谐波对电机的有害影响与其他噪声源类似)。如果没有陷波滤波器,你就必须将低通滤波器的截止频率设置得更低(增加延迟),以避免将这种噪声传递给电机。
信息:
仅提供了一个陷波滤波器。对于存在多个低频噪声尖峰的机身,通常使用陷波滤波器消除第一个尖峰,使用低通滤波器消除后续的尖峰。
- 陀螺仪传感器数据上的陷波滤波器,用于滤除窄带噪声,例如旋翼桨叶通过频率处的谐波。可以使用
IMU_GYRO_NF0_BW和IMU_GYRO_NF0_FRQ参数配置该滤波器。
最佳的滤波器设置取决于飞行器。默认设置较为保守,这样它们在质量较低的配置下也能正常工作。
2.3、滤波器调校
首先确保激活 high-rate logging profile(SDLOG_PROFILE 参数)。然后,Flight Review 将显示滚动、俯仰和偏航控制的 FFT 图。
参考:MC滤波器调谐和控制延迟 |PX4 指南 (v1.15)
警告
- 不要试图通过调校滤波器来解决飞行器的高振动问题!而是应该修复飞行器的硬件设置。
- 确认 PID 增益(尤其是 D)没有设置得太高,因为这可能会表现为振动。
滤波器优化最好通过查看飞行日志来完成。您可以使用不同的参数紧接着执行多个 flight,然后检查所有日志,但请确保在两者之间解除备务,以便创建单独的日志文件。
执行的飞行机动可以简单地在手动/自稳模式下悬停,向各个方向进行一些滚动和俯仰,并增加一些油门周期。总持续时间不需要超过 30 秒。为了更好地进行比较,所有测试中的作都应该相似。
2.3.1、步骤1:调整低通滤波器--IMU_GYRO_CUTOFF
首先,使用较低的 D 项滤波器值 (IMU_DGYRO_CUTOFF = 30),以 10 Hz 的步长增加陀螺仪滤波器IMU_GYRO_CUTOFF。
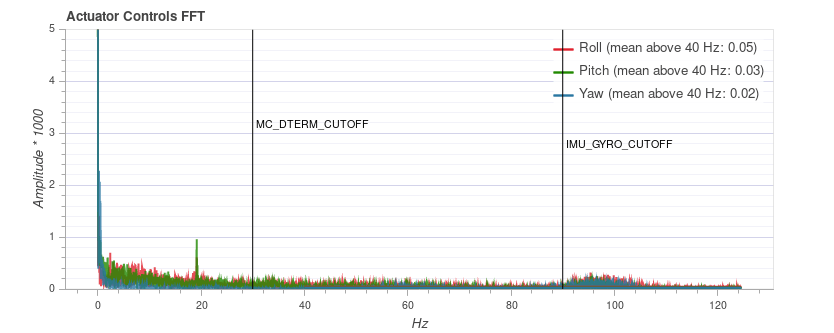
将日志上传到 Flight Review 并比较 Actuator Controls FFT 图。
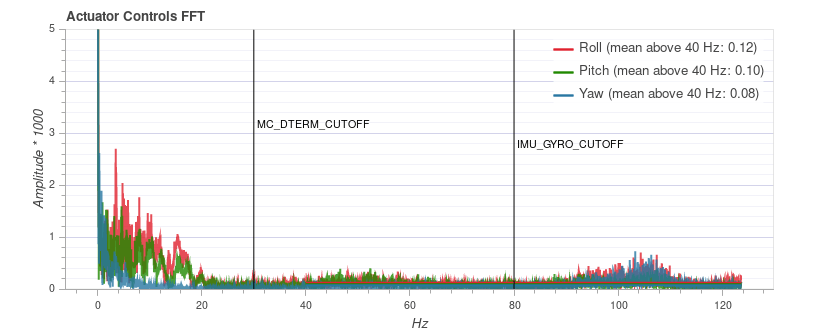
将截止频率设置为噪声开始明显增加之前的值(对于 60 Hz 左右和更高的频率)。
2.3.2、步骤2:调整D 项滤波器--IMU_DGYRO_CUTOFF
然后以相同的方式调整 D 项滤波器 ()。
请注意,如果IMU_GYRO_CUTOFF和IMU_DGYRO_CUTOFF设置相差过大,可能会对性能产生负面影响(不过差异必须很显著,例如D=15,gyro=80)。
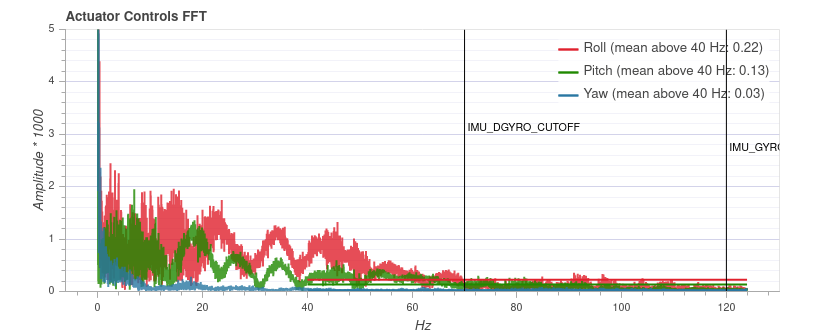
2.3.3、示例
下面是三个不同滤波器值(40 赫兹、70 赫兹、90 赫兹)的示例。在 90 赫兹时,总体噪声水平开始增加(尤其是横滚方向),因此 70 赫兹的截止频率是一个比较安全的设置。IMU_DGYRO_CUTOFF=40、IMU_DGYRO_CUTOFF=70、IMU_DGYRO_CUTOFF=90
信息
由于y轴刻度可能不同,因此无法在不同车辆之间比较该图。在同一架飞机上,它是一致的,并且与飞行时间无关。
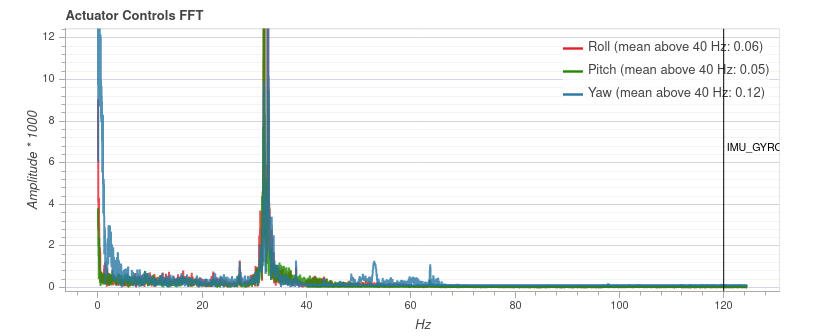
2.3.4、调整陷波滤波器
如果飞行图显示明显的低频尖峰,如下图所示,您可以使用陷波滤波器将其删除。
在这种情况下,您可以使用以下设置:IMU_GYRO_NF0_FRQ=32 和 IMU_GYRO_NF0_BW=5(请注意,此峰值比平时窄)。
低通滤波器和陷波滤波器可以独立调谐(即,在收集用于调谐低通滤波器的数据之前,您无需设置陷波滤波器)。
2.3.5、其他提示
-
可接受的延迟取决于飞行器的大小和期望。第一人称视角(FPV)竞速飞行器通常会调校到绝对最小延迟(大致在
IMU_GYRO_CUTOFF为 50 到 80 之间,以 120 左右为参考)。对于较大的飞行器,延迟的影响较小,IMU_GYRO_CUTOFF约为 80 可能是可以接受的。 -
你可以从较高的值(例如 100 赫兹)开始调校,这可能是比较合适的,因为
IMU_GYRO_CUTOFF的默认调校值设置得非常低(30 赫兹)。唯一需要注意的是,你必须意识到其中的风险:- 飞行时间不要超过 20-30 秒
- 检查电机是否没有变热
- 如上所述,聆听奇怪的声音和过度噪音的症状。
参考:
Log Analysis using Flight Review | PX4 Guide (v1.15)
Vibration Isolation | PX4 Guide (v1.15)
技术专栏|多旋翼飞行器振动机理分析和减振设计_空中飞的电机传动振动频率范围-CSDN博客
多旋翼无人机振动分析与减振方法_无人机振动原理-CSDN博客


















 3090
3090

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









