







 本文详细探讨了超声成像的三个关键要素:空间分辨率、时间分辨率和对比度分辨率。空间分辨率涉及轴向和横向分辨率,分别取决于脉冲长度、频率和阻尼以及波束宽度和聚焦技术。时间分辨率则关乎超声系统捕捉快速运动结构的能力,可通过降低穿透深度、减少焦点数量或减少扫描线来提高。对比度分辨率则关注区分不同回声幅度的能力,可通过动态范围压缩、图像存储和造影剂使用来增强。对于超声成像技术的理解有助于优化诊断和临床应用。
本文详细探讨了超声成像的三个关键要素:空间分辨率、时间分辨率和对比度分辨率。空间分辨率涉及轴向和横向分辨率,分别取决于脉冲长度、频率和阻尼以及波束宽度和聚焦技术。时间分辨率则关乎超声系统捕捉快速运动结构的能力,可通过降低穿透深度、减少焦点数量或减少扫描线来提高。对比度分辨率则关注区分不同回声幅度的能力,可通过动态范围压缩、图像存储和造影剂使用来增强。对于超声成像技术的理解有助于优化诊断和临床应用。
本文讨论诊断超声物理学的三个主要方面,即空间分辨率、时间分辨率和对比度分辨率。
1. 空间分辨率
超声换能器由许多压电元件组成,压电元件将电能转换为声能,反之亦然。声波以脉冲波束的形式从换能器表面传播到软组织中。声波部分被组织吸收,但也被反射回换能器,在那里被检测到。超声扫描仪能够瞬间处理许多脉冲波束,从而产生用于诊断的实时图像。超声系统在组织特定深度区分两点的能力,即轴向分辨率和横向分辨率,主要由换能器决定。
1.1 轴向分辨率(Axial Resolution)
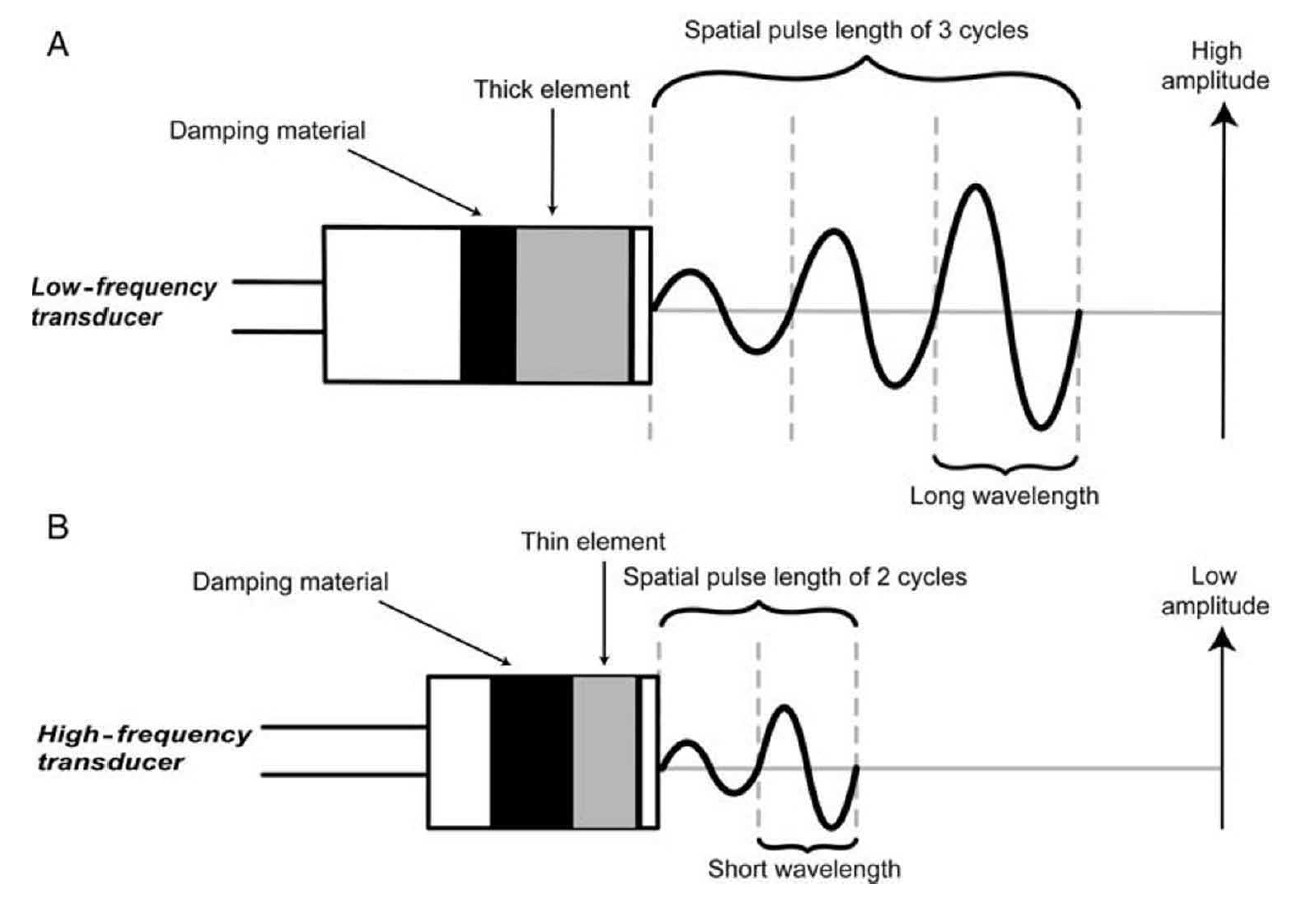
轴向(也称为纵向)分辨率是平行于超声波束方向的两个反射体之间可以区分的最小距离。在数学上,它等于空间脉冲长度的一半。空间脉冲长度是超声脉冲的周期数和波长的乘积(图 1A)。大多数脉冲由两个或三个周期组成,其数量由激励后压电元件的阻尼决定:高阻尼减少脉冲中的周期数,从而缩短空间脉冲长度(图 1B)。脉冲的波长由换能器的工作频率决定;高频换能器有薄的压电元件,可以产生短波长的脉冲(图 1B)。波长等于换能器中元件厚度的两倍。
为了缩短空间脉冲长度、提高轴向分辨率,需要高阻尼和高频率的特性,然而这些特性具有以下与衰减相关的问题:
-
过高的阻尼会伴随着振幅损失,导致超声强度降低。
-
高频脉冲在软组织中衰减更大,这意味着声波可能无法从深层结构充分反射回来以供换能器检测。
深层结构的轴向分辨率相对较低,因为必须使用低频(2 MHz)的换能器,例如,在心脏的经胸成像过程中。在这种情况下,过大的衰减会妨碍高频换能器的使用。另一种做法是使换能器靠近感兴趣的结构,以便可以使用高频换能器,例如经食管(7 MHz)放置换能器。
1.2 横向分辨率(Lateral Resolution)
横向分辨率是垂直于超声波束方向的两个反射体之间可以区分的最小距离。当超声波束宽度较窄时,横向分辨率较高。
波束的宽度和横向分辨率随距离换能器的距离而变化,也就是说:
-
在换能器处,波束宽度大约等于换能器的宽度。
-
在与换能器垂直的称为近区长度(near-zone length)的距离处,光束会聚到其最窄的宽度,即换能器宽度的一半(图 2A)。光束所覆盖的空间区域称为近区(Fresnel 区)。
-
当距离大于近区长度,即在远区(Fraunhofer 区)时,当换能器到反射体的距离是近区长度的两倍时,波束发散到换能器的宽度,在这里横向分辨率降低。
近区长度越长,横向分辨率越高。近区长度由下面的公式决定:
增加近区长度的因素包括:
-
短波长;
-
高频换能器,由具有高阻尼的薄压电元件组成(频率与波长成反比);
-
大孔径(宽阵元)。
此外,多阵元换能器的主波束周围的波束(称为栅瓣)可能会造成伪影并降低横向分辨率。通过在称为变迹(apodization)的过程中以可变电压驱动阵元,可以最小化栅瓣。
聚焦(Focusing)
换能器中的压电元件在不同的时间工作,可以使脉冲波束变窄,并提高横向分辨率。这种聚焦过程导致在近区而不是远区内形成焦点区域(图 2C)。
聚焦缩短了波束最窄点到换能器的距离,也就是说,它将近区长度减少到一个较短的值,称为焦距。超出焦点区域的光束是发散的,因此比该点更深的结构的横向分辨率会降低。聚焦波束的宽度由由下面的公式决定:
此外,通过聚焦在组织内的多个深度,可以提高横向分辨率。该过程需要针对每个焦点沿着相同的扫描线重复超声脉冲。不幸的是,这会伴随着帧速率和时间分辨率的降低。这种多焦点的做法适用于对固定结构(例如神经)进行成像,但对于快速移动的结构(例如心脏),则不太可取。

1.3 时间分辨率(Temporal Resolution)
解剖结构以二维或三维的一系列帧显示在超声机的屏幕上。每一帧由形成扫描线的重复脉冲创建。根据焦点的数量,这些脉冲可以被复制(图 3A)。时间分辨率是从一帧开始到下一帧的时间,它代表了超声系统区分快速移动结构的瞬时事件的能力,例如,在心动周期中。可以通过以下方式提高帧频并提高时间分辨率:
-
降低穿透深度,因为脉冲只需要传播很短的距离;
-
减少焦点数量,因为不必重复扫描线;
-
减少每帧扫描线,使用窄帧而不是宽帧。
这种关系可以从以下等式导出:
其中,
组合上面的等式,可以得到帧频的公式:
与上面由许多扫描线得到一帧图像以显示解剖结构不同的是,使用运动模式(M 模式)可以获得改进的时间分辨率,例如在评估瓣膜结构的运动时。在 M 模式下,结构以一个维度表示。时间分辨率定义为从一个脉冲到下一个脉冲所花费的时间,即脉冲重复周期(图 3B)。
多普勒(Doppler)
在多普勒模式下,超声脉冲从换能器传播到运动目标,在那里它们被反射回换能器。这个过程是间歇性的,并且以一种称为脉冲重复频率的频率发生。与成像模式相比,空间脉冲长度较长,因为每个脉冲包含 5-30 个周期。
接收脉冲和发射脉冲的频率之差称为多普勒频移。通过多普勒频移能够测量反射体(例如血液中的红细胞)的速度:
多普勒频移是不断变化的,如果它达到脉冲重复频率一半的值,多普勒图像的时间分辨率将因速度的不正确表示而受到影响。此时的多普勒频移频率称为奈奎斯特极限:
多普勒频移超过奈奎斯特极限会出现时间混叠(图 3C)。有三种主要方法可以提高时间分辨率,从而防止时间混叠:
-
降低换能器的频率,保持多普勒频移值小于奈奎斯特极限。
-
提高脉冲重复频率,但这样会损失一些深度分辨率,称为距离模糊。
-
可以以连续多普勒模式而不是脉冲多普勒模式发送脉冲,这样可以测量非常高的速度。但是,这种模式不再具有深度分辨率。
此外,多普勒信息也可以显示在类似于上述解剖结构成像的彩色窗口(彩色多普勒模式)中(图 3D)。彩色窗口的每一帧都由重复的超声波脉冲形成。每一帧包含多条扫描线,每条扫描线都有多个脉冲(称为 ensemble length)。每条扫描线需要这些重复的脉冲提供足够的信息,包括确定反射体的移动方向、反射体的平均速度、功率和方差(速度分布),因此帧率极低。帧频由下面的公式决定:
彩色多普勒成像的两个方面与时间分辨率有关:
-
可以通过利用窄的彩色窗口来提高帧速率并因此提高时间分辨率。
-
彩色多普勒能检测的最大速度可以被超声医师改变,这样脉冲重复频率会随之发生变化。降低能检测的最大速度和脉冲重复频率会降低时间分辨率,因此在检测较低速度时也会出现混叠。

3. 对比度分辨率(Contrast Resolution)
对比度分辨率是指区分相邻结构的不同回波幅度的能力。对比度分辨率可以在成像过程的不同阶段得到增强,这些阶段包括动态范围压缩、图像存储和造影剂的使用。
动态范围压缩
超声波的振幅和功率各不相同,最高功率和最低功率的比值称为动态范围,通常以对数形式表示:
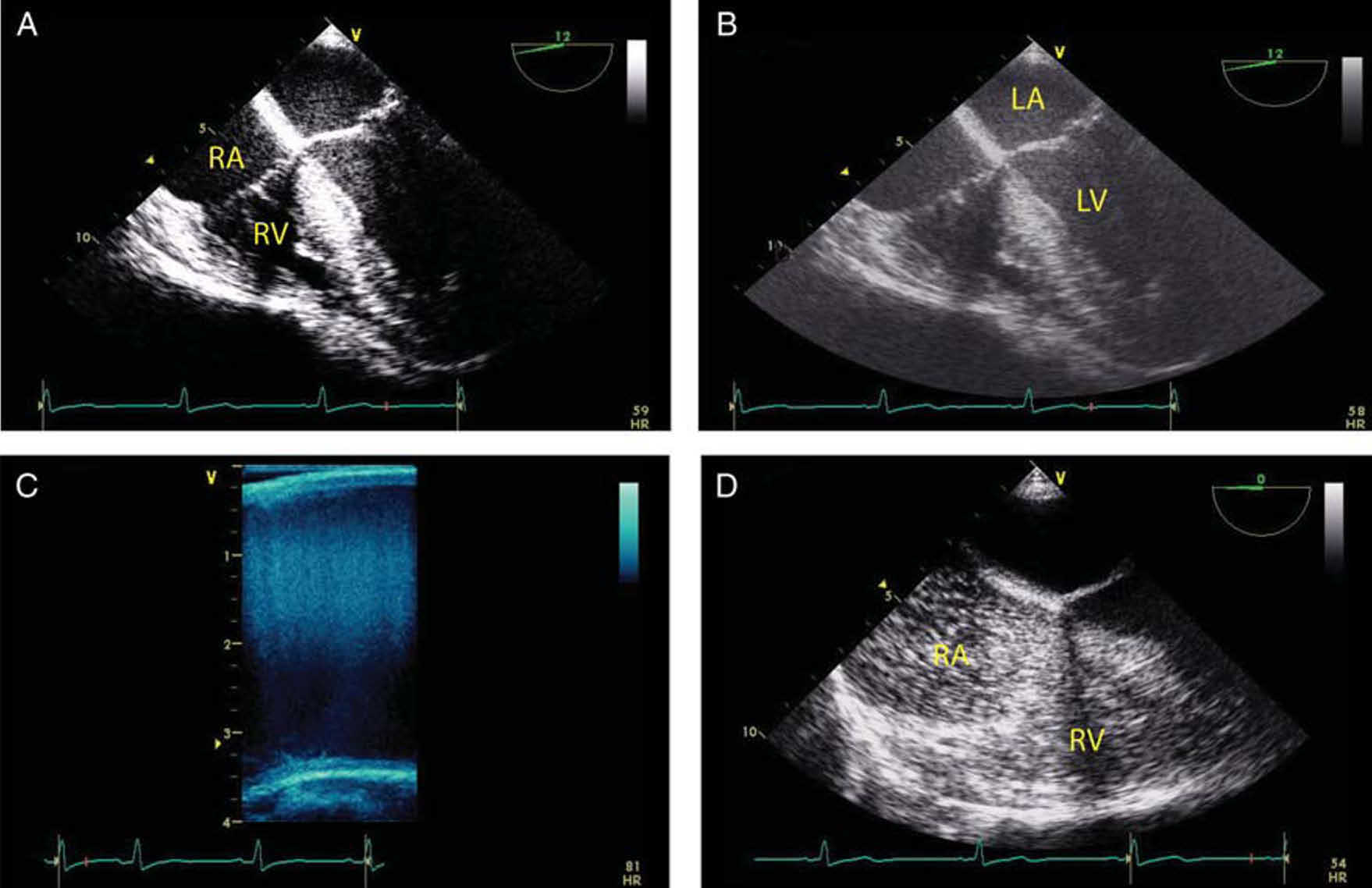
动态范围压缩发生在信号处理器中,通过将较大的功率规定为最大值和将较小的功率规定为零值,来减小动态范围。高压缩、窄动态范围(例如 30 分贝)会产生高对比度的图像(图 4A)。相反,低压缩、宽动态范围(例如 60 分贝)会产生低对比度和许多灰色阴影的图像(图 4B)。对比度分辨率可以通过添加颜色来增强,因为人眼可以区分比灰色阴影更多的颜色阴影(图 4C)。
图像存储
包含在脉冲波形中的信息的存储发生在图像存储器中。为了能够可视化各种灰度,图像存储器的每个部分(像素)必须包含尽可能多的二进制位,例如 5 位存储器可以存储 32 种灰度值。
造影剂
当传统超声成像不能充分区分心肌组织和血液时,会使用造影剂(contrast agents)。造影剂是气体微泡的悬浮液,例如搅拌盐水、全氟丙烷或六氟化硫。
注射造影剂后,它们暂时停留在血液中,可以与心肌分开显示。之所以会出现这种现象,是因为气体中超声的阻抗与软组织中的明显不同。阻抗是密度和传播速度的乘积,空气中的阻抗较低,而软组织中的阻抗较高。当这种差异出现时,超声会被微泡强烈反射,从而提高对比度分辨率和感兴趣结构的可视化(图 4D)。
参考文献:Ng, Alexander, and Justiaan Swanevelder. “Resolution in Ultrasound Imaging.” Continuing Education in Anaesthesia, Critical Care & Pain, vol. 11, no. 5, 2011, pp. 186–192.


















 5486
5486

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









