









💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁

💥1 概述
为了快速准确地在复杂环境中进行目标检测,本文提出一种基于深度强化学习算法的图像检测方法——用于图像目标检测的深度Q学习算法。将深度学习感知能力与强化学习决策能力相结合,利用深度学习预训练网络提取特征,利用强化学习将检测过程视作马尔可夫决策过程问题,将当前可视区域视为状态,将边界框变换作为动作,基于重叠度值变化设计相应的奖励函数。为检验提出方法的有效性,通过数据集进行验证,实验结果表明,在对图像进行少于10个区域的分析情况下,能快速检测出图像中目标,且精度达到58.4%,每张图片平均检测时间为6.04s。与深度学习目标检测算法对比,该方法极大地减少了候选区域数量,所需计算量较低,在保证准确度的前提下,具备检测速度快、准确高的特点,这为复杂环境中地面无人平台的目标检测提供了新型的方法。本文采用模糊控制思想,使基于机器人的控制,能够具有有效的算法理论,行为机器人验证平台,以此平台为基础可以针对行为辅助机器人进行力控制研究。针对机器人力控制的实际要求,设计了行为辅助机器人柔性关节结构,辨识了系统参数。基于QNX实时操作系统设计了控制系统软件。机器人控制系统软件主要包括传感器数据采集和控制算法两部分,可以满足柔性关节控制需求。
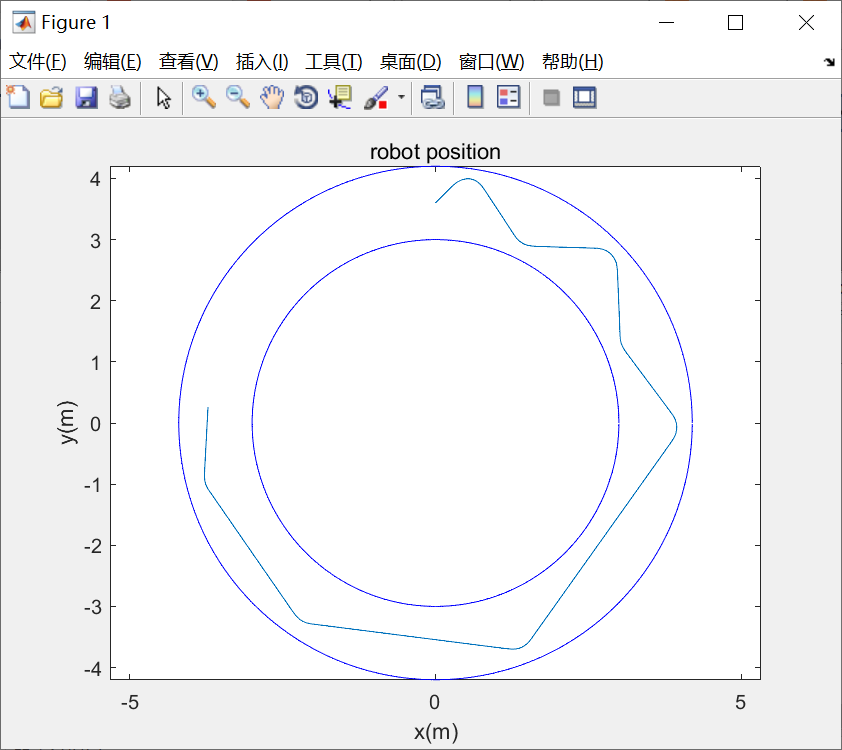
📚2 运行结果




🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]杜春侠. 基于模糊先验知识的Q学习及在足球机器人系统中的应用[C]//中国自动化学会机器人竞赛工作委员会.2004中国机器人足球比赛暨学术研讨会论文集.[出版者不详],2004:221-228.
[2]罗来全,李升波,高洪波等. 用于图像目标检测的深度Q学习算法[C]//中国指挥与控制学会.2019第七届中国指挥控制大会论文集.[出版者不详],2019:425-431.DOI:10.26914/c.cnkihy.2019.055354.














 1195
1195











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









