






一、实验目的:
掌握图像中特征检测和显示。
掌握OpenCV中轮廓查找的方法
二、实验内容:
1、相机拍摄棋盘格为目标的视频,用Harris、FAST和SIFT检测角点特征并进行显示;
2、仍以棋盘格为目标,利用Hough变换检测其直线并显示;
3. 【挑战-选做】利用OpenCV实现查找棋盘格。
三、实验要求:
1、相机拍摄棋盘格为目标的图像,用三种检测角点特征并进行显示;
2、仍以棋盘格为目标,利用Hough变换检测其直线并显示;
3.利用OpenCV实现查找棋盘格。
要包含有软件的流程设计图及说明;结果的截屏图像及实验结果详细说明
四、实验原理:
本实验使用了opencv中videocapture方法,Harris、FAST和SIFT检测角点特征方法,hough变换检测直线方法以及以角点检测为基础的棋盘格检测方式。完成不同方式检测角点以及棋盘格查找。
实验所用设备配置为:
处理器 AMD Ryzen 7 4800U with Radeon Graphics 1.80 GHz
机带 RAM 16.0 GB (15.4 GB 可用)
系统类型 64 位操作系统, 基于 x64 的处理器
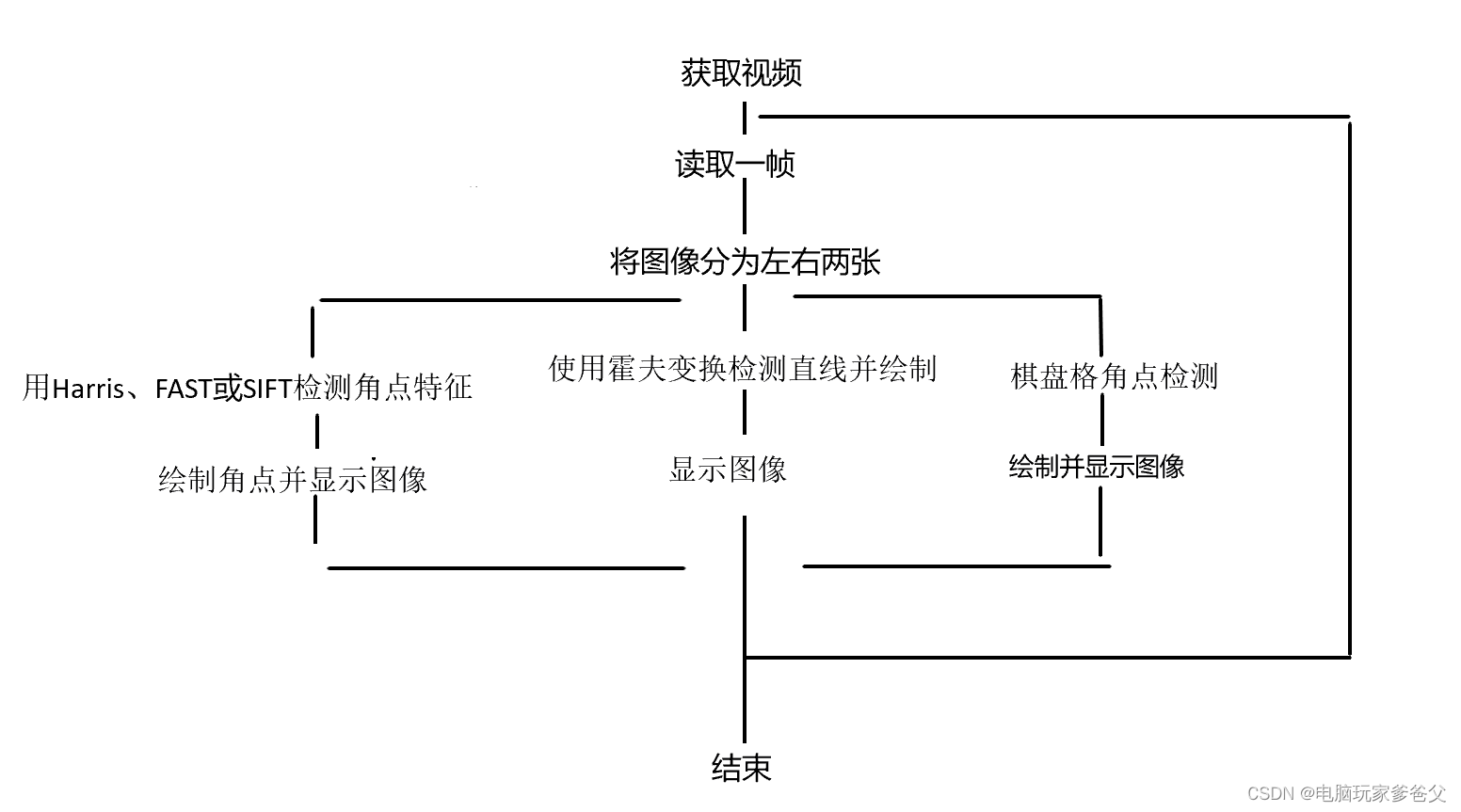
五、实验过程:
六、实验结果:
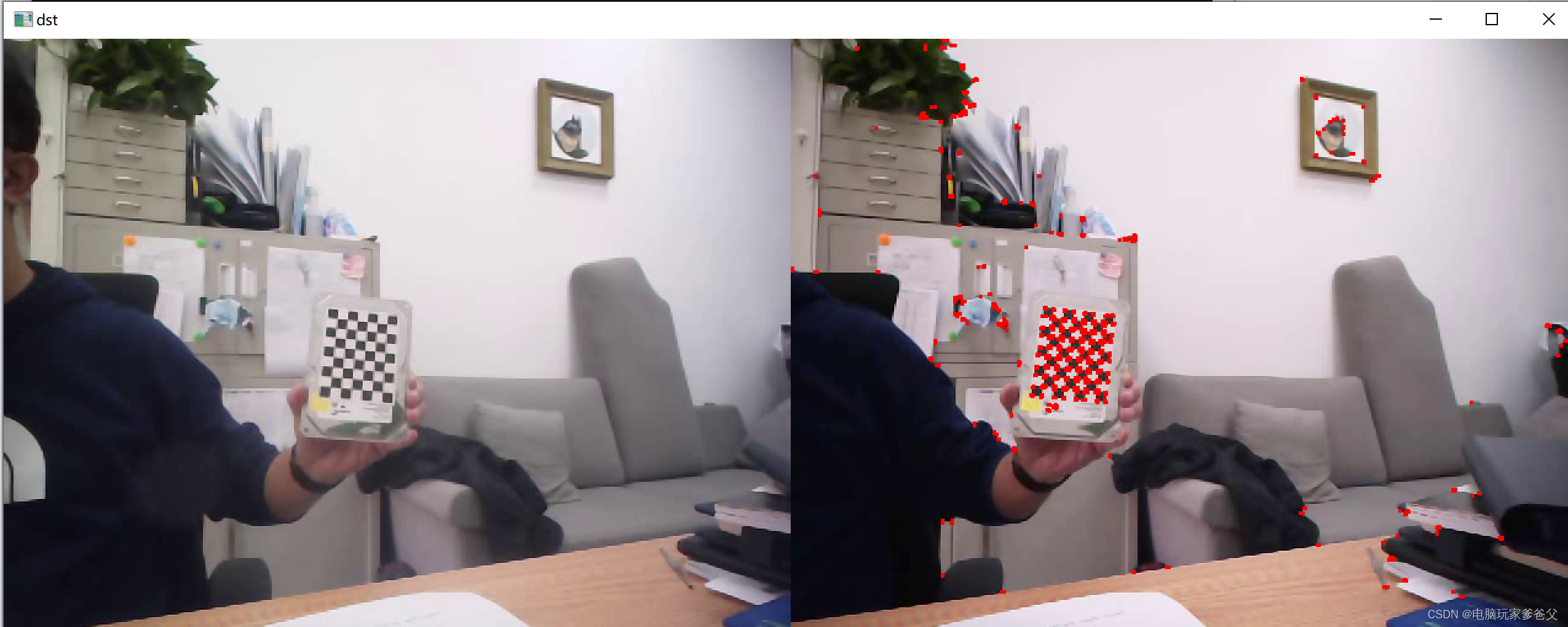
Harris角点检测结果

fast角点检测结果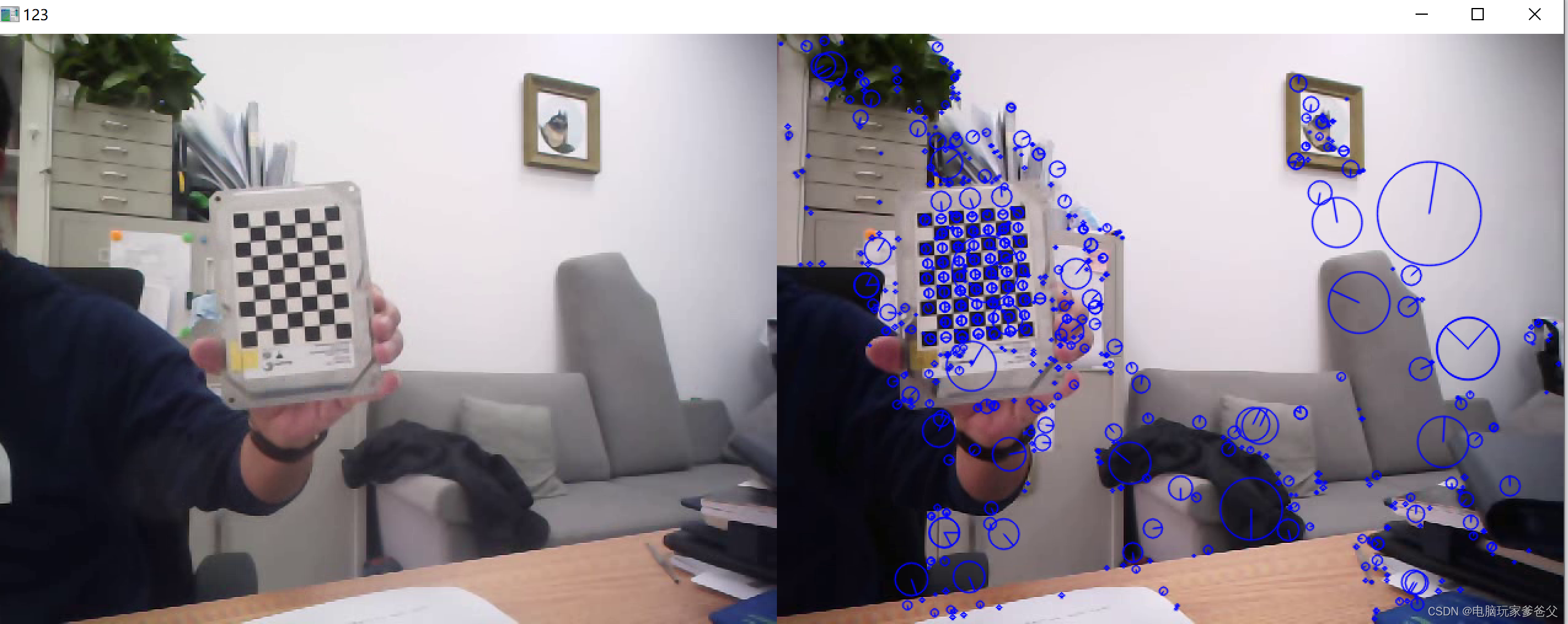
SIFT角点检测结果
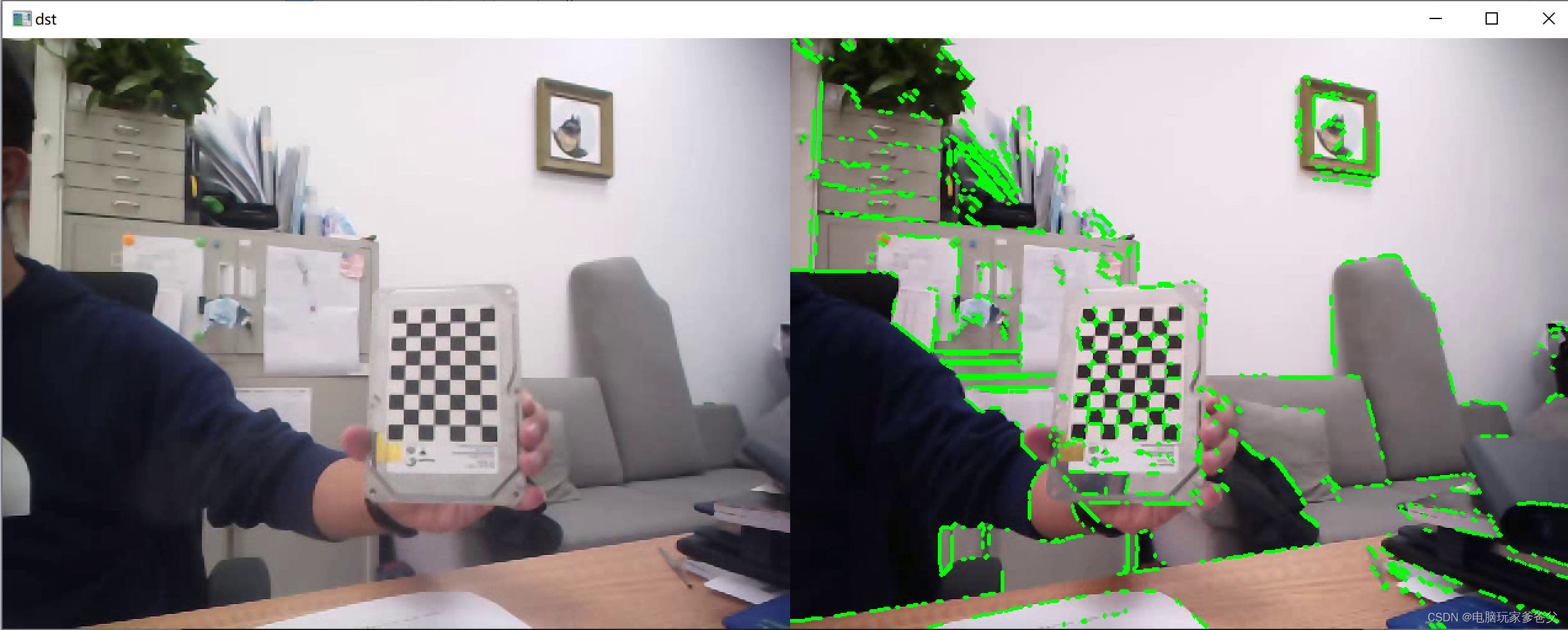
Huogh变换检测直线结果
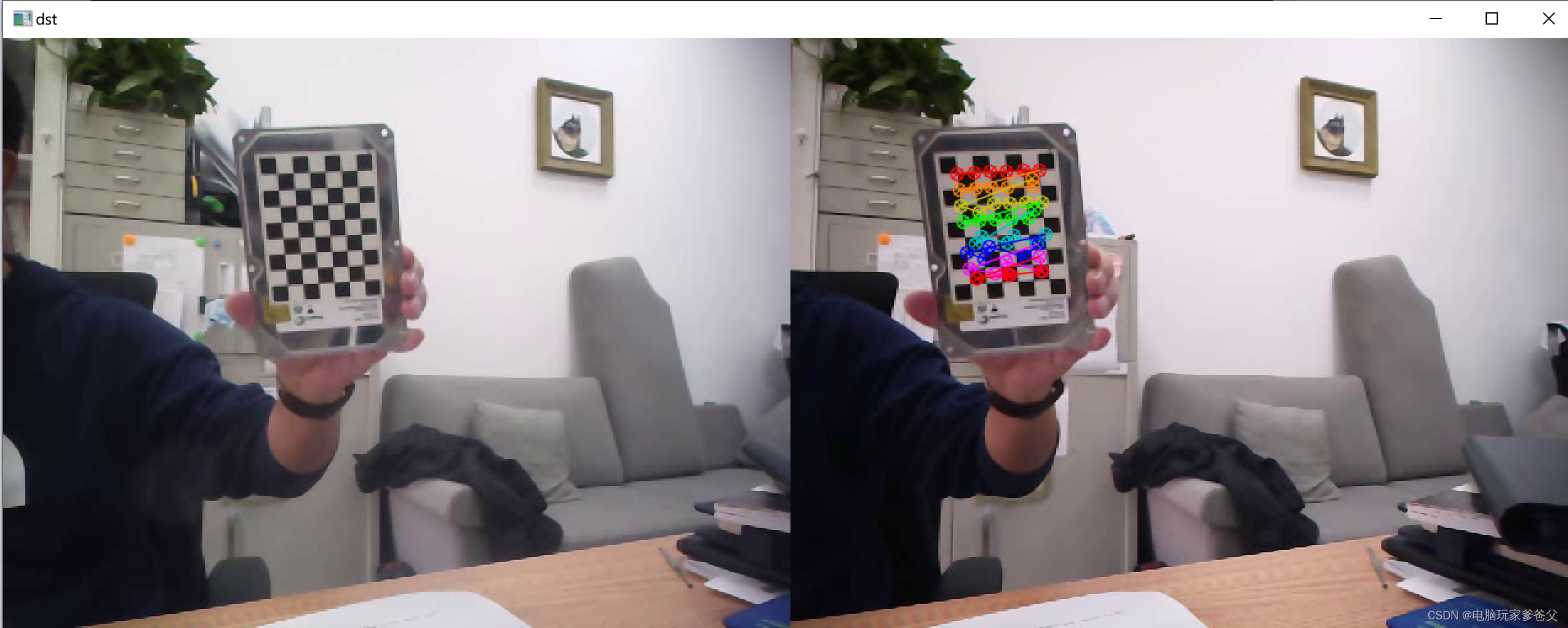
棋盘格检测结果
Fast:
import cv2
import numpy as np
def Fast_detect_fault(img_01):
fast = cv2.FastFeatureDetector_create() # 初始化(参数可不写,也可以写入数字)
keypoint = fast.detect(img_01,None)
img_01 = cv2.drawKeypoints(img_01,keypoint,img_01,color=(255,0,0))
cv2.imshow('fault.png',img_01)
# Print all default params
print ("Threshold: ", fast.getThreshold())
print ("nonmaxSuppression: ", fast.getNonmaxSuppression())
print ("neighborhood: ", fast.getType())
print ("Total Keypoints with nonmaxSuppression: ", len(keypoint))
def Fast_detect_Setparam(img_02,thre):
# fast = cv2.FastFeatureDetector_create()
# fast.setNonmaxSuppression(100) 使用fast.setNonmaxSuppression来设置默认参数
fast_02 = cv2.FastFeatureDetector_create(threshold=thre, nonmaxSuppression=True,
type=cv2.FAST_FEATURE_DETECTOR_TYPE_5_8) # 获取FAST角点探测器
kp = fast_02.detect(img_02, None) # 描述符
img_0 = cv2.drawKeypoints(img_02, kp, img_02, color=(255, 0, 0)) # 画到img上面
#cv2.imshow('sp_'+str(thre),img_02)
# Print all set params
print("Threshold: ", fast_02.getThreshold()) # 输出阈值
print("nonmaxSuppression: ", fast_02.getNonmaxSuppression()) # 是否使用非极大值抑制
print("neighborhood: ", fast_02.getType())
print("Total Keypoints with nonmaxSuppression: ", len(kp)) # 特征点个数
#cv2.waitKey(0)
return img_02
if __name__ == '__main__':
video = cv2.VideoCapture("ForCalibration.avi")
if video.isOpened():
# video.read() 一帧一帧地读取
# open 得到的是一个布尔值,就是 True 或者 False
# frame 得到当前这一帧的图像
open, frame = video.read()
else:
open = False
while open:
ret, frame = video.read()
# 如果读到的帧数不为空,那么就继续读取,如果为空,就退出
if frame is None:
break
if ret == True:
h, w, _ = frame.shape
img = frame[:, w // 2:w, :]
img = Fast_detect_Setparam(img,5)
cv2.imshow('dst', frame)
# 这里使用 waitKey 可以控制视频的播放速度,数值越小,播放速度越快
# 这里等于 27 也即是说按下 ESC 键即可退出该窗口
if cv2.waitKey(1) & 0xFF == 27:
break
video.release()
cv2.destroyAllWindows()Sift:
import cv2
import numpy as np
# 展示图像,封装成函数
video = cv2.VideoCapture("ForCalibration.avi")
# 第一步:读取图像,咋换成灰度图
cv2.namedWindow("123")
while(1):
i,frame = video.read()
h, w, _ = frame.shape
img = frame[:, w // 2:w, :]
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 使用cv2.xfeatures2d.SIFT_create() 实例化sift函数
sift = cv2.xfeatures2d.SIFT_create()
# 得到所有的关键点
keypoints = sift.detect(gray, None) # 计算关键点
keypoints, descriptor = sift.compute(gray, keypoints) # 根据关键点计算周围区域的特征向量描述
# 或者一次性计算出关键点和特征向量,如下:
keypoints, descriptor = sift.detectAndCompute(gray, None)
# 打印特征点的信息,其中最关键的 kpoint.pt 就是包含了位置信息
# 将关键点标记的图片上
img2 = cv2.drawKeypoints(image=img, outImage=img, keypoints=keypoints,
flags=cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS,
color=(255, 0, 0))
cv2.imshow("123", frame)
cv2.waitKey(10) # 等待时间,单位是毫秒,0代表任意键终止
Harris:
import cv2
from PIL import Image
import numpy as np
video = cv2.VideoCapture("ForCalibration.avi")
if video.isOpened():
open, frame = video.read()
else:
open = False
while open:
ret, frame = video.read()
# 如果读到的帧数不为空,那么就继续读取,如果为空,就退出
if frame is None:
break
if ret == True:
h,w,_ = frame.shape
img = frame[:,w//2:w,:]
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
gray = np.float32(gray)
# 输入图像必须是float32,最后一个参数在0.04到0.05
dst = cv2.cornerHarris(gray, 2, 3, 0.04)
dst = cv2.dilate(dst, None)
# Threshold for an optimal value, it may vary depending on the image.
img[dst > 0.01 * dst.max()] = [0, 0, 255]
cv2.imshow('dst', frame)
# 这里使用 waitKey 可以控制视频的播放速度,数值越小,播放速度越快
# 这里等于 27 也即是说按下 ESC 键即可退出该窗口
if cv2.waitKey(1) & 0xFF == 27:
break
video.release()
cv2.destroyAllWindows()Hough直线检测:
import cv2
from PIL import Image
import numpy as np
def Line(img):
# 通过边缘检测,得到二值化图像
img_gray = cv2.cvtColor(img, cv2.COLOR_RGB2GRAY)
edges = cv2.Canny(img_gray, 50, 150, apertureSize=3)
# cv2.imshow('1',edges)
# cv2.waitKey(0)
# 霍夫直线检
minLineLength = 10
maxLineGap = 2
lines = cv2.HoughLinesP(edges, 1, np.pi / 180, 30, minLineLength, maxLineGap)
#画出图像上检测到的所有直线
try:
for line in lines:
for x1, y1, x2, y2 in line:
cv2.line(img, (x1, y1), (x2, y2), (0, 255, 0), 2)
except TypeError as e:
pass
return img
if __name__ == "__main__":
video = cv2.VideoCapture("ForCalibration.avi")
if video.isOpened():
# video.read() 一帧一帧地读取
# open 得到的是一个布尔值,就是 True 或者 False
# frame 得到当前这一帧的图像
open, frame = video.read()
else:
open = False
while open:
ret, frame = video.read()
# 如果读到的帧数不为空,那么就继续读取,如果为空,就退出
if frame is None:
break
if ret == True:
# 转换为灰度图
h, w, _ = frame.shape
img = frame[:, w // 2:w, :]
img = Line(img)
cv2.imshow('dst', frame)
#cv2.waitKey(0)
# 这里使用 waitKey 可以控制视频的播放速度,数值越小,播放速度越快
# 这里等于 27 也即是说按下 ESC 键即可退出该窗口
if cv2.waitKey(20) & 0xFF == 27:
break
video.release()
cv2.destroyAllWindows()棋盘格:
# -*- coding: utf-8 -*-
import cv2
# 查找棋盘格 角点
criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.1)
# 棋盘格参数
corners_vertical = 6 # 纵向角点个数;
corners_horizontal = 8 # 横向角点个数;
pattern_size = (corners_vertical, corners_horizontal)
def find_corners_sb(img):
"""
查找棋盘格角点函数 SB升级款
:param img: 处理原图
"""
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 查找棋盘格角点;
ret, corners = cv2.findChessboardCornersSB(gray, pattern_size, cv2.CALIB_CB_EXHAUSTIVE + cv2.CALIB_CB_ACCURACY)
if ret:
# 精细查找角点
corners2 = cv2.cornerSubPix(gray, corners, (11, 11), (-1, -1), criteria)
# 显示角点
cv2.drawChessboardCorners(img, pattern_size, corners2, ret)
def find_corners(img):
"""
查找棋盘格角点函数
:param img: 处理原图
"""
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 查找棋盘格角点;
ret, corners = cv2.findChessboardCorners(gray, pattern_size, cv2.CALIB_CB_ADAPTIVE_THRESH +
cv2.CALIB_CB_FAST_CHECK +
cv2.CALIB_CB_FILTER_QUADS)
if ret:
# 精细查找角点
corners2 = cv2.cornerSubPix(gray, corners, (11, 11), (-1, -1), criteria)
# 显示角点
cv2.drawChessboardCorners(img, pattern_size, corners2, ret)
def main():
video = cv2.VideoCapture("ForCalibration.avi")
if video.isOpened():
# video.read() 一帧一帧地读取
# open 得到的是一个布尔值,就是 True 或者 False
# frame 得到当前这一帧的图像
open, frame = video.read()
else:
open = False
while open:
ret, frame = video.read()
# 如果读到的帧数不为空,那么就继续读取,如果为空,就退出
if frame is None:
break
if ret == True:
h, w, _ = frame.shape
img = frame[:, w // 2:w, :]
if img is not None:
# 执行查找角点算法
find_corners_sb(img)
# find_corners(img_src)
cv2.imshow('dst', frame)
# cv2.waitKey(0)
# 这里使用 waitKey 可以控制视频的播放速度,数值越小,播放速度越快
# 这里等于 27 也即是说按下 ESC 键即可退出该窗口
if cv2.waitKey(1) & 0xFF == 27:
break
video.release()
cv2.destroyAllWindows()
# file_path = ('cheese1.png')
# img_src = cv2.imread(file_path)
#
# if img_src is not None:
# # 执行查找角点算法
# find_corners_sb(img_src)
# # find_corners(img_src)
#
# # 显示图片
# cv2.imshow("img", img_src)
# cv2.waitKey(0)
#
# cv2.destroyAllWindows()
if __name__ == '__main__':
main()
















 278
278











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











