






1 因子图
对于一个已知的条件, 例如 y=Φx+z (z 是噪声), 当我们已知向量x的先验概率分布, 如何通过我们观测到的 y 来反推出 x 的后验概率密度,或据此对x做一个估计? 显然, 这是一个在实际中非常常见的问题。 那么它对应的因子图我们可以首先画成这样:
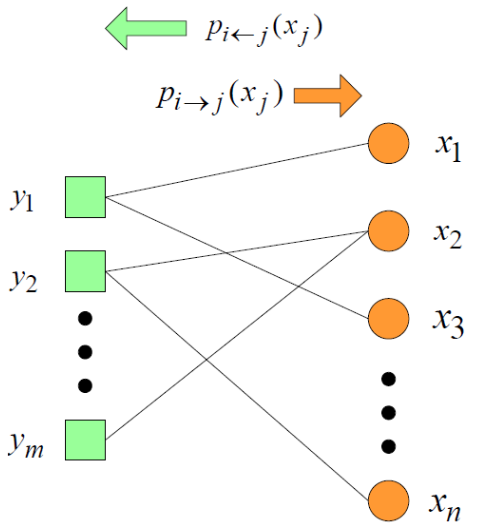
首先m × 1的观测向量y 和 n × 1 的变量 x 都是向量, 都是由其中的单个标量![]() 和
和![]() 组成的。 而因子图就是把向量关系 y=Φx+z 展开成了标量因子的形式画出来。 然后, 比如如果
组成的。 而因子图就是把向量关系 y=Φx+z 展开成了标量因子的形式画出来。 然后, 比如如果![]() 那么两者之间就连一条线, 以此类推。 据此, 就可以得到因子图了。
那么两者之间就连一条线, 以此类推。 据此, 就可以得到因子图了。
比如如果上式中的Φ的元素非零, 那么每一个y应该都和所有的x相关。![]() 被称为 输入节点 或 变量节点。
被称为 输入节点 或 变量节点。 ![]() 被称为 输出节点 或 观测节点。
被称为 输出节点 或 观测节点。![]() 即Φ矩阵的第 i 行第 j 列元素非零时,
即Φ矩阵的第 i 行第 j 列元素非零时,![]() 节点间会有一条边。
节点间会有一条边。
结合因子图,我们来讲述, 什么是消息传递算法呢? 事实上, 所谓消息传递算法就是在因子图上, 输入节点 和 输出节点 之间沿着边, 互相传递关于输出节点的 消息 , 最终收敛到一个对
的估计。 而所谓的消息,其实就是关于
的概率分布。
理解:
在一开始, 我们已经有了关于 x 的先验分布因子, 每个节点都有一个已知的先验概率。 而我们要做的就是根据观测到的y,来结合先验概率, 得到每个
的后验概率。
[注]先验概率和后验概率理解:
先验——根据若干年的统计(经验)或者气候(常识),某地方下雨的概率;
似然——下雨(果)的时候有乌云(因/证据/观察的数据)的概率,即已经有了果,对证据发生的可能性描述;
后验——根据天上有乌云(原因或者证据/观察数据),下雨(结果)的概率;
后验 ~ 先验*似然 : 存在下雨的可能(先验),下雨之前会有乌云(似然)~ 通过现在有乌云推断下雨概率(后验);
先验概率可理解为统计概率,后验概率可理解为条件概率。
(1)![]() 这个代表的是
这个代表的是传递给
节点的信息。即就是
结合了除
以外的其他y输出节点,更新的自己的后验概率,并将此传递给
节点。比如, y 如果是个3 × 1的向量即有3个y节点。 那么,我们的已知条件, y = Φ x + z 其实可以表示成:
其中, 代表Φ 的第n行。 那么
![]() 代表的就是由
代表的就是由![]() 两个条件得到的
两个条件得到的的后验概率。注意,这个概率要结合
的先验概率, 同时是基于x其他变量概率已知的情况.
(2)![]() 代表的就是由节点
代表的就是由节点![]() 的后验概率做出的更新推断。 例如,
的后验概率做出的更新推断。 例如,![]() 就是由于我们已知
就是由于我们已知![]() 而又已知了其他
而又已知了其他![]() 的概率分布(显然,
的概率分布(显然,节点可以接收到其他节点给他的
![]() 信息,也就是他们的概率分布),从而可以推断出的
信息,也就是他们的概率分布),从而可以推断出的的后验概率。 注意,这里
是不结合先验概率的。正如前面
![]() 是不考虑
是不考虑的信息一样,这里是为了防止同一条信息被重复计算。
得到![]() 后,
后,再结合自己的先验分布更新自己的概率分布。 然后参与到下一次迭代中的消息传递。
通过不断地迭代,最后传递的消息逐渐趋于收敛。至此,我们就可以得到一个基于观测y推断的x 的分布 (有了分布, 显然也可以根据各种不同的准则, 如MMSE, 做出对x的估计了)
深入浅出GAMP算法(上): 因子图与消息传递算法_B417科研笔记的博客-CSDN博客_消息传递算法















 167
167











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









