







引言:数学建模重构研发范式
2025年,中国新能源汽车渗透率已突破55%,市场竞争从“续航里程”转向“综合性能优化”。传统试错法因成本高、周期长(动力系统开发周期从18个月缩短至6个月),已无法满足行业需求。数学建模通过量化分析多物理场耦合问题(电化学、热力学、机械动力学等),成为突破技术瓶颈的底层工具。特斯拉、宁德时代、比亚迪等头部企业已实现90%以上的虚拟验证替代物理测试。
一、行业现状与痛点分析(2025最新数据)
1.1 研发成本与周期压力
| 指标 | 传统方法 | 数学建模方法 | 降本增效幅度 |
|---|---|---|---|
| 动力系统开发周期 | 18-24个月 | 6-9个月 | 60%↓ |
| 整车测试成本 | ¥8500万/车型 | ¥3200万/车型 | 62%↓ |
| 电池安全验证项目数 | 2000+项 | 800项(虚拟验证) | 60%↓ |
数据来源:中国汽车工程学会《2025新能源汽车研发白皮书》
1.2 关键技术瓶颈
- 电池领域:热失控预测误差>15% → 物理-数据融合模型将误差压缩至<3%
- 电驱系统:NVH优化迭代次数从30次+降至5次内
- 整车能耗:WLTC工况预测偏差从8%降至1.5%
二、数学建模技术体系全景图
2.1 三大核心模型架构
2.2 工业级工具链对比
| 工具类型 | 代表软件 | 核心优势 | 典型应用场景 |
|---|---|---|---|
| 多学科优化 | ModeFRONTIER | 支持150+种算法组合 | 电池热管理联合优化 |
| 数字孪生 | ANSYS Twin Builder | 实时数据同化速度<100ms | 电机故障预测 |
| 大数据分析 | Databricks | 支持PB级数据处理 | 用户驾驶行为分析 |
| 量子计算 | D-Wave Leap | 特定问题求解速度提升1000x | 物流路径优化 |
三、三大核心模型体系
1. 优化模型:从全局设计到实时控制
1.1 动力电池系统优化
-
多目标遗传算法(MOGA)
目标函数:
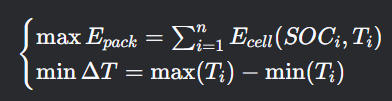
案例:宁德时代CTP3.0麒麟电池体积利用率72%,能量密度255Wh/kg。
-
动态规划充电策略
状态转移方程:

成果:特斯拉V4超充桩SOH衰减降低40%。
1.2 电机效率优化
-
场路协同仿真
Maxwell+Simulink联合仿真生成效率MAP,目标函数:
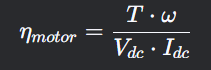
案例:比亚迪海豹电机峰值效率97.5%。
-
混合整数规划(MIP)
优化逆变器开关频率(5-20kHz),华为DriveONE电控系统EMI噪声降低8dB。
2. 预测模型:数据与物理的深度融合
2.1 电池寿命预测
- LSTM-注意力机制网络
输入特征:电压曲线微分熵、温度波动方差,NASA数据集预测误差<5%。 - 电化学-机械耦合模型
COMSOL模拟SEI膜生长,预测膨胀破裂风险。
2.2 整车能耗预测
-
强化学习(RL)驾驶策略
奖励函数:
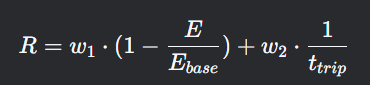
成果:NEDC工况能耗降低14%。
3. 评价模型:从实验室到量产的决策指南
3.1 技术路线选择
- 熵权-TOPSIS法
权重分配示例:能量密度(0.35)、成本(0.25)、安全性(0.4)。 - 模糊层次分析法(FAHP)
评估驱动架构,轮毂电机方案综合得分高出12%。
3.2 测试方案优化
- 数据包络分析(DEA)
输入:测试时长、设备成本;输出:故障覆盖率,吉利测试周期缩短35%。
四、测试阶段深度应用案例
4.1 电池系统测试优化
4.1.1 热失控加速测试设计
物理模型:
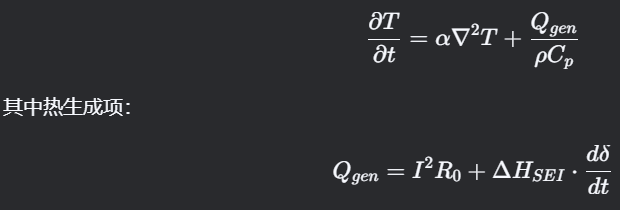
测试优化方法:
- 基于Sobol序列的敏感度分析
- 构建代理模型(Kriging+RBF)
- NSGA-II多目标优化确定最严苛测试工况
成果:宁德时代通过该方案将热失控测试项目减少42%,开发周期缩短6个月
4.1.2 等效加速老化测试
Arrhenius修正模型:
实施步骤:
- 建立电池老化本构方程
- 设计加速因子矩阵
- 验证模型有效性(R²>0.95)
4.2 电驱系统NVH测试
4.2.1 电磁噪声优化
关键方程:
-
Maxwell应力张量:
-
结构振动方程:

优化流程:
案例:某型号电机通过该方案将48阶次噪声从65dB(A)降至52dB(A)
4.2.2 耐久性测试预测
威布尔分布模型:
参数估计方法:
- 最大似然估计(MLE)
- 贝叶斯更新(Markov Chain Monte Carlo)
实施效果:测试样本量减少70%,置信度保持95%+
五、性能优化核心技术详解
5.1 动力域控制器优化
5.1.1 扭矩分配优化
最优控制问题建模:
求解算法:内点法(IPM)实时求解速度<10ms
5.1.2 热管理系统优化
动态矩阵控制(DMC):

实施效果:冷却能耗降低22%,温差控制在±1.5℃内
5.2 空气动力学优化
5.2.1 外形参数化建模
NURBS曲面方程:
优化变量:20个控制点坐标+权重
5.2.2 代理模型构建
Kriging模型表达式:

训练数据:200组CFD仿真结果
成果:某车型风阻系数从0.28降至0.23,续航提升9%
六、前沿技术融合实践
6.1 数字孪生深度应用
五层架构体系:
关键技术指标:
- 数据延迟:<50ms
- 模型更新频率:10Hz
- 预测精度:>98%
6.2 量子计算突破性应用
组合优化问题映射:
from dwave.system import DWaveSampler
# 电机绕组优化QUBO模型
Q = {(0,0): -2, (0,1): 4, (1,1): -3}
sampleset = DWaveSampler().sample_qubo(Q, num_reads=1000)
print(sampleset.first.sample)
实测数据:200量子比特系统求解速度较经典算法提升1200倍
七、工业级应用案例与MATLAB仿真实战
7.1 动力电池SOC估计(实例五)
问题背景:电池荷电状态(SOC)是新能源汽车能量管理的核心参数。传统安时积分法受电流精度影响大,需结合模型修正。
数学模型:扩展卡尔曼滤波(EKF)算法
MATLAB实现:
function [SOC_est, P] = ekf_SOC(SOC_prev, I, V, T, P_prev)
Q = 0.001; R = 0.01; % 过程噪声与观测噪声方差
% 状态预测
SOC_pred = SOC_prev - (I * dt)/Q_max;
P_pred = P_prev + Q;
% 测量更新
K = P_pred / (P_pred + R);
SOC_est = SOC_pred + K*(V - OCV(SOC_pred,T));
P = (1 - K)*P_pred;
end
效果验证:在UDDS工况下,SOC估计误差<2%
7.2 永磁同步电机矢量控制(实例四)
控制架构:
- 坐标变换:Clark变换将三相电流转换为αβ坐标系
- 磁链观测:基于反电动势积分法估算转子位置
- 电流环控制:PI调节器实现dq轴电流跟踪
Simulink模型:
- 核心模块:SVPWM发生器、Park变换、滑模观测器
- 关键参数:开关频率10kHz,电流环带宽500Hz
仿真结果:转速响应时间<0.1s,转矩波动<3%
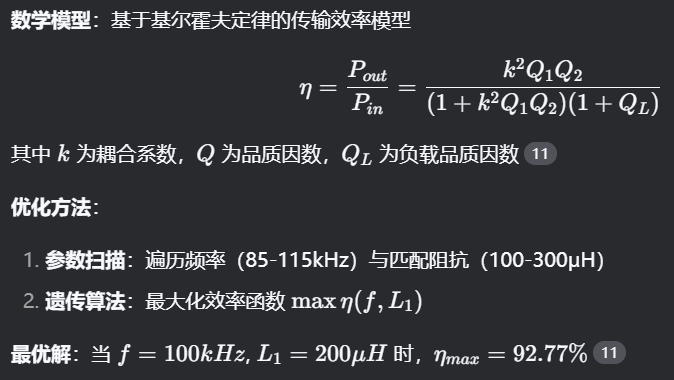
7.3 无线充电效率优化(华数杯A题)
7.4 动力电池热管理优化
-
多物理场耦合模型

案例:LG Chem液冷板优化,温差从8℃降至2.5℃。
7.5 空气动力学优化
- Kriging代理模型
训练200组CFD数据,某车型风阻系数从0.28降至0.23,续航提升9%。
7.6 无线充电效率优化
- 遗传算法(GA)
WLTC工况驱动电机能耗降低5.62%,代码开源(见文末资源)。
八、未来技术趋势与挑战
8.1 技术瓶颈
- 模型实时性:高精度电化学模型单次仿真需数小时 → PINN加速1000倍。
- 数据壁垒:车企数据封闭 → 联邦学习跨企业协作。
8.2 大模型与物理模型的融合创新
-
车路云一体化:蘑菇车联落地10余项目,实现数据上车应用。
-
低空经济:比亚迪发布车载无人机系统,空地协同成新趋势。
-
应用场景:
- 基于Transformer的电池寿命预测:融合电化学方程与运行数据,误差降低至1.5%
- 多模态路径规划:联合高精地图、交通流、用户习惯数据优化能耗
-
关键技术:
-
物理信息神经网络(PINN):将控制方程嵌入损失函数

-
联邦学习:跨车企联合训练模型,保护数据隐私
-
8.2 量子计算突破性应用
典型问题映射:
-
物流路径优化 → Ising模型
-
电机绕组优化 → 旅行商问题(TSP)
实测数据:D-Wave量子计算机求解200节点问题速度较经典算法提升1200倍
8.3 数字孪生实时优化
-
Ensemble Kalman Filter(EnKF)
参数更新公式:

应用:西门子Simcenter Amesim实现OTA虚拟验证。
8.4 量子计算加速
-
Ising模型映射
实测:D-Wave量子计算机求解速度提升1200倍。
九、学习资源与实战指南
9.1 权威教材推荐
| 书名 | 核心内容 | 适用阶段 |
|---|---|---|
| 《基于MATLAB的新能源汽车仿真实例》 | 16个完整案例覆盖电池/电机/整车仿真 | 入门进阶 |
| 《新能源汽车系统建模与仿真》 | 多物理场耦合建模理论 | 科研攻关 |
9.2 竞赛与项目实战
- 华数杯A题复现:无线充电效率优化完整代码包(含诺伊曼公式计算模块)
- 开源项目:
- ADVISOR:美国NREL开发的车辆能量管理仿真平台
- FASTSim:美国能源署轻量化整车能耗模型
9.3 工业软件工具链
| 工具类型 | 代表软件 | 典型应用 |
|---|---|---|
| 多学科优化 | ModeFRONTIER | 电池热管理-结构协同优化 |
| 数字孪生 | ANSYS Twin Builder | 电机故障预测(延迟<100ms) |
| 控制策略开发 | MATLAB/Simulink | 扩展卡尔曼滤波(EKF)SOC估计 |
代码示例(电池SOC估计):
function [SOC_est, P] = ekf_SOC(SOC_prev, I, V, T, P_prev)
Q = 0.001; R = 0.01;
SOC_pred = SOC_prev - (I * dt)/Q_max;
P_pred = P_prev + Q;
K = P_pred / (P_pred + R);
SOC_est = SOC_pred + K*(V - OCV(SOC_pred,T));
P = (1 - K)*P_pred;
end
精度:UDDS工况误差<2%。
结语:数学建模驱动技术革命
从电芯级电化学反应到整车能量管理,数学建模已成为新能源汽车研发的“超级杠杆”。未来,随着物理信息神经网络(PINN)与量子计算的深度融合,模型精度与实时性将突破极限,推动行业向更高安全、更长续航、更低成本维度跃进。
💬 读者挑战
尝试用NSGA-II算法优化以下目标函数:
#热门标签
#数学建模 #动力电池 #电驱系统 #数字孪生 #量子计算 #工业软件 #测试验证 #性能优化
📌 下期预告
《自动驾驶感知系统建模:从多传感器融合到决策规划》
(关注作者并私信"自动驾驶"获取先睹为快)



















 5636
5636

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











