






前言
1、 该文章仅作为分享以及自己学习单片机过程的记录;
2、该项目是在学习完b站up主江协科技(原江科大自化协)的stm32系列入门视频后制作的小项目,其中大部分代码是参考其提供的代码,希望能给同样正在学习单片机的同学一些启示;
3、由于本人刚接触单片机不久能力不足,该文可能有一些错误,欢迎评论指正。
一、准备
硬件方面:
一块stm32f103c8t6开发板;
一块mpu6050陀螺仪;
一块tb6612电机驱动模块;
一块电池(本人使用的是4.8v,应以实际需要为准);
一块0.96寸iic协议的oled屏;
一个平衡小车底座;
一块面包板(用于验证电路);
焊接工具、排针排母等。
软件方面:
keil5软件;
一个绘制pcb的软件(嘉立创、AD等)。

二、程序思路
大致框图:
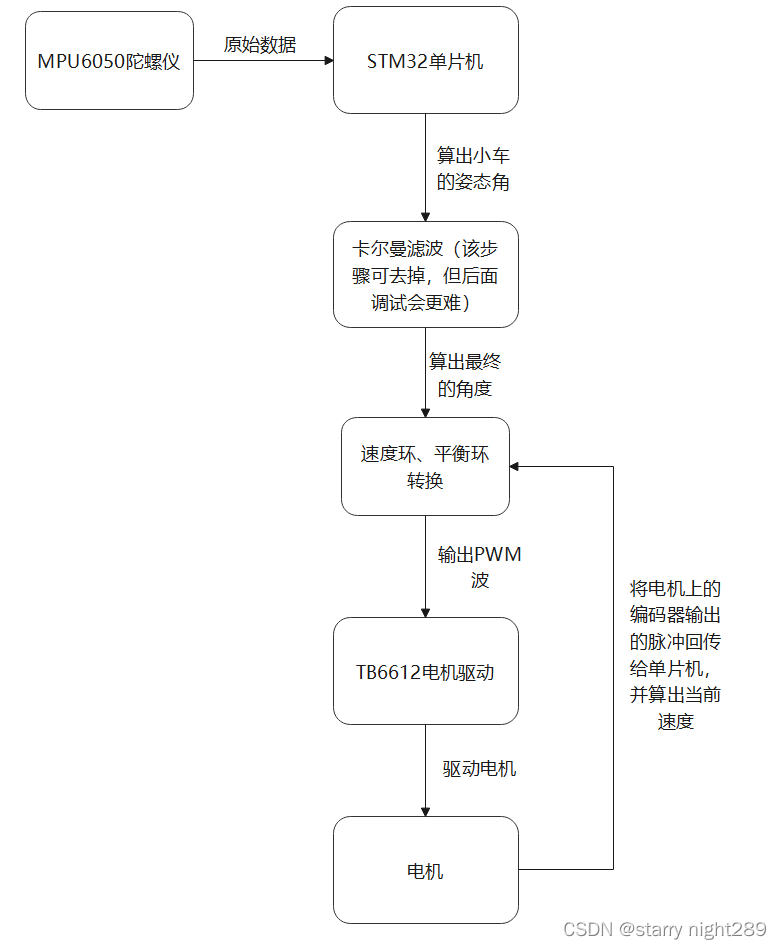
注解:
由于该平衡小车只完成了小车自平衡部分,因此总体思路较为简单。在while语句中,不断获取陀螺仪的数据,并计算出最终的角度,然后输出经过速度环和直立环相加得到的数值并赋值到对应PWM的CCR参数中。电机上的霍尔编码器数据传回单片机并算出当前小车的速度后,重新计算出新的值并赋给CCR。最终一直循环即可让其保持平衡。
三、主要代码
主函数:
先是各种定义变量以及初始化,看源码即可。
while (1)
{
Get_Angle(&AccX,&AccY,&AccZ,&GyroX,&GyroY,&GyroZ,&Accel_Angle_x,&Accel_Angle_y);
S = Balance(Pitch)-Velocity(S1,S2);
Motor_SetSpeed1(S);
Motor_SetSpeed2(S);
}while语句中的Get_Angle(...)函数是获取当前的各种最终角度,其中已计算完成了卡尔曼滤波部分。Balance()函数是直立环,Velocity()是速度环,S变量的值最终输出的是一个int型变量,Motor_SetSpeedx()函数用于将S的值赋值为PWM中的CCR值,用于修改输出的占空比,从而控制电机旋转速度。
获取角度值
{
MPU6050_GetData(AccX, AccY, AccZ, GyroX, GyroY, GyroZ); //获取陀螺仪原始数据
*Accel_Angle_x=atan2(*AccY,90-*AccZ)*180/PI; //求倾斜角,单位为度
*Accel_Angle_y=atan2(*AccX,*AccZ)*180/PI; //求倾斜角,单位为度
*GyroX=(*GyroX/16.4)+2; //+2是为了保持陀螺仪在水平的位置为0
*GyroY=(*GyroY/16.4)+1;
float GyroXf = (float)*GyroX;
float Accel_Angle_xf = (float)*Accel_Angle_x; //进制转换
Pitch=-Kalman_Filter_x(Accel_Angle_xf,-GyroXf); //使用卡尔曼滤波求出最终角度
}在这个函数中,获取陀螺仪原始数据实际上是对其寄存器进行读写,详情可观看up主江协科技的stm32教程中的MPU6050那一节,这里不再赘述。求倾斜角时候由于我的小车的电路板是反装在车架下的,如下图。因此需要90-*AccZ。卡尔曼滤波部分我参考了网上其他的一些开源项目。感兴趣的可以自行下载源码研究。

直立环和速度环
直立环:
balance=-Balance_Kp/100*Angle_bias-Gyro_bias*Balance_Kd/100;其公式为直立环的重点,通过修改Balance_Kp和Balance_Kd的值,再将上面获取到的角度值代入这个公式,输出值即实际上赋给CCR的值。当只有直立环且kp和kd值调好后,小车应该出现较为稳定的姿态,能保持一定的平衡但维持不久。
速度环:
velocity=-Encoder_bias*Velocity_Kp/100-Encoder_Integral*Velocity_Ki/100;其大体上与直立环类似,通过修改Velocity_Kp和Velocity_Ki的值,最终速度环的值与直立环的值相加并输出驱动电机。当小车加入速度环之后,小车正常的现象应为小范围的摇摆,但此时小车已经能够保持平衡且能维持很久。
四、调试
(这部分强烈建议上网找调参教程,下面是我个人参考视频后得出的一些结论)
调试直立环一般从kp值开始,需要调整到小车有大幅的低频震荡为止。确定kp值的正负时,需要满足小车向前倾斜时,车向前进,当向后倾斜时候,小车往后退。当调试到最后感觉小车反应有些慢,应考虑是否有其他进程占用资源了,类似oled屏幕显示刷新。获取角度的间隔太长时,小车的反应自然慢了;
确定直立环的kd值的正负时,可以将kp值先注释掉,先给kd值定大一些,kd极性正确的现象应该是小车向前快速倾斜时轮子需要向前转动,反之也一样。将kd值和kp值调试调到小车出现高频的震荡时,同时将kd和kp值同×0.6,即可出现较为稳定的姿态,虽维持不久但能保持一定的平衡。
速度环的kp值是ki值的200倍,因此只需调整kp值。确定kp的正负时,可将直立环去掉并将其值定大一些,现象是将轮子向前拨动时,车轮会加速。在直立环的基础上添加速度环后,现象是小车会在一定范围内摆动,需要更大的耐心并慢慢调试即可消除摇摆。














 2158
2158











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









