







焊装仿真项目的工期一般可将工作分为三大阶段:第一阶段方案验证,第二阶段仿真细化,第三阶段仿真整合(离线编程)。
第一阶段方案验证,就是工艺和设计,我们不仅要对验证结果做出书面说明,还要导出焊枪姿态,以便设计修改夹具或者抓手等工装。导焊枪姿态的必要文件:焊枪、插枪宏命令脚本、焊点表、CATIA。
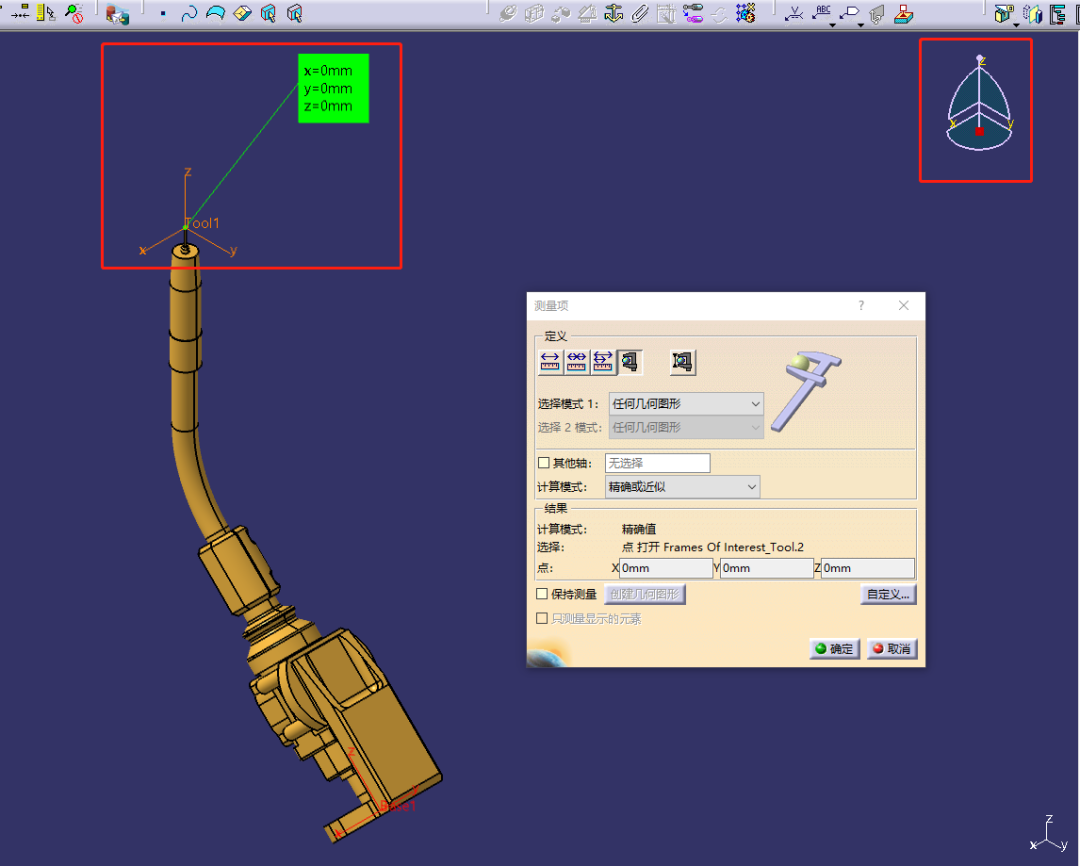
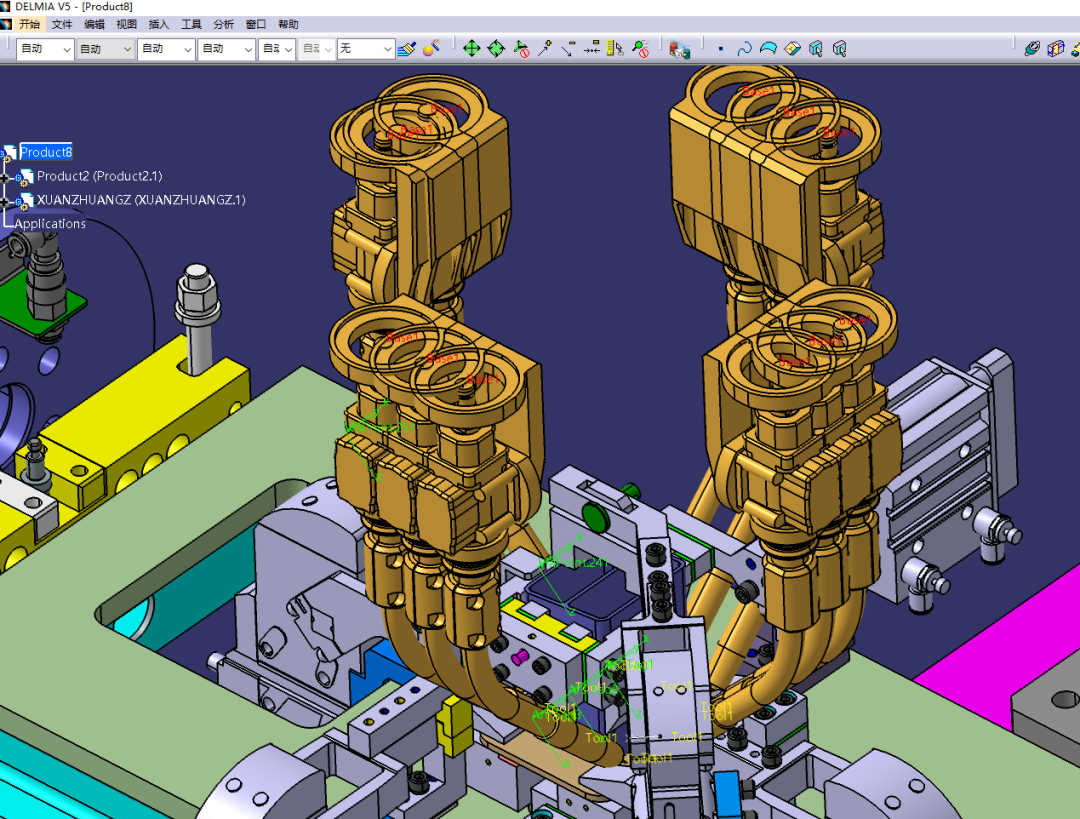
批量导入焊枪的宏命令脚本 要求 焊枪上创建坐标原点,X、Y、Z方向要与罗盘的方向保持一致,同时坐标原点要与仿真的TCP一致,即DELMIA中创建的焊枪TOOL。这样才能保证导入焊枪的姿态正确。(前期在设置焊枪的TOOL坐标时就要注意方向及原点设置才能给后期插枪正确导入,如果后期不做插枪工作则可随意,不影响仿真的进行)如下图所示
操作方法:
Step1:将上图中的焊枪另存为cgr.格式的文件。
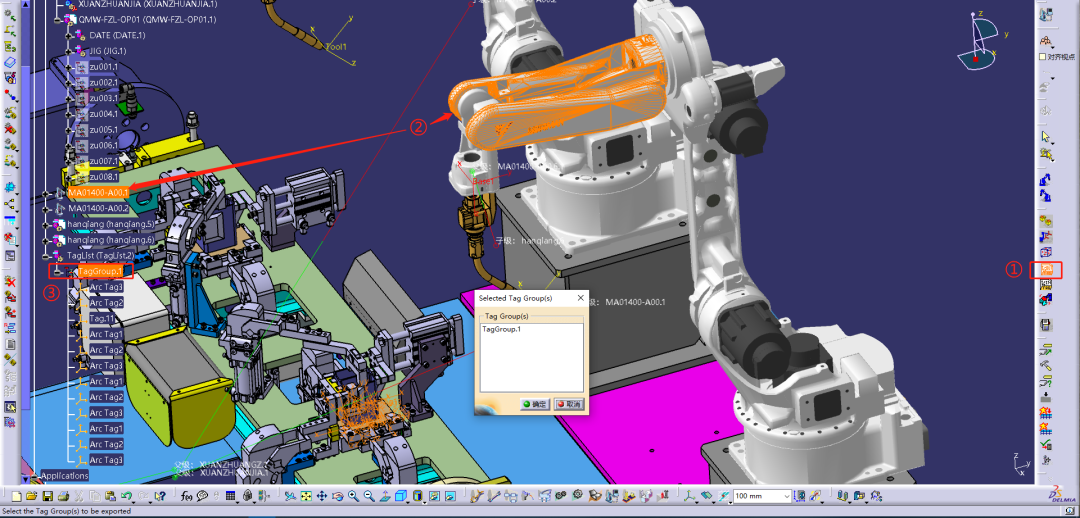
Step2:①在【Tag】中点击【New Tag Group】;②在【ResourcesList】资源列表下点击任意资源;③创建【Tag Group】后点【确定】;
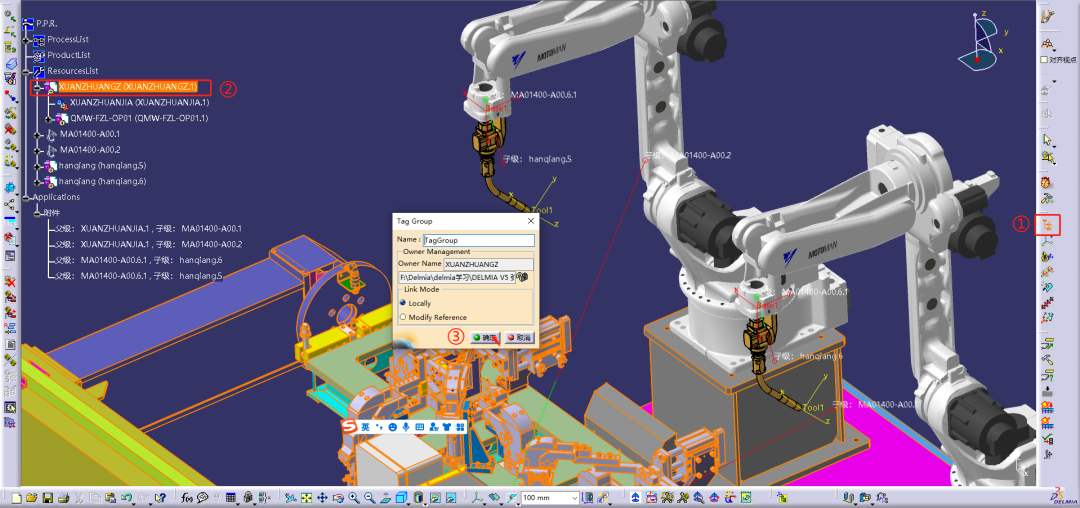
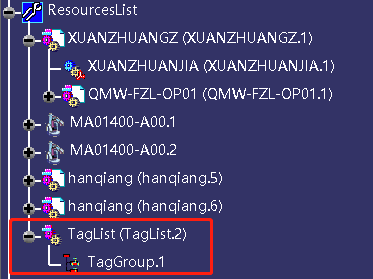
即可得到以下如图【TagList】。
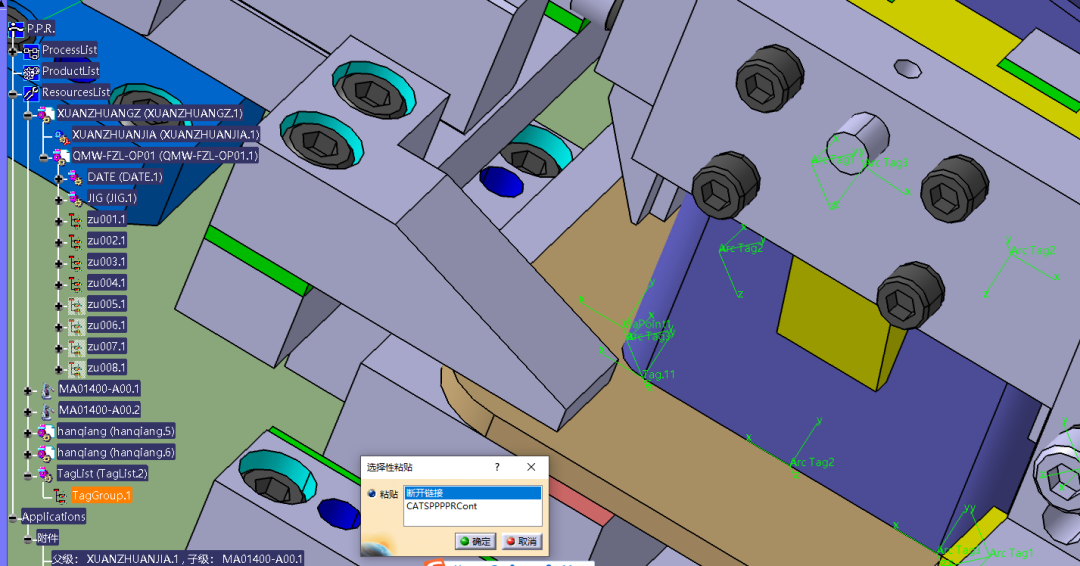
Step3:复制要进行导入焊枪姿态的焊点,选择性粘贴到【TagGroup】上,断开链接。
Step4:切换到【Robot Offline Programming】离线平台。
Step5:①在【Calibration】中点击【Export Tag Group Info】;②点击机器人弹出【Selected Tag Group(s)】对话框;③再点击【Tag Group】后点【确定】,导出焊点车身坐标(参考设备原点为:车身坐标),保存为.xls格式。
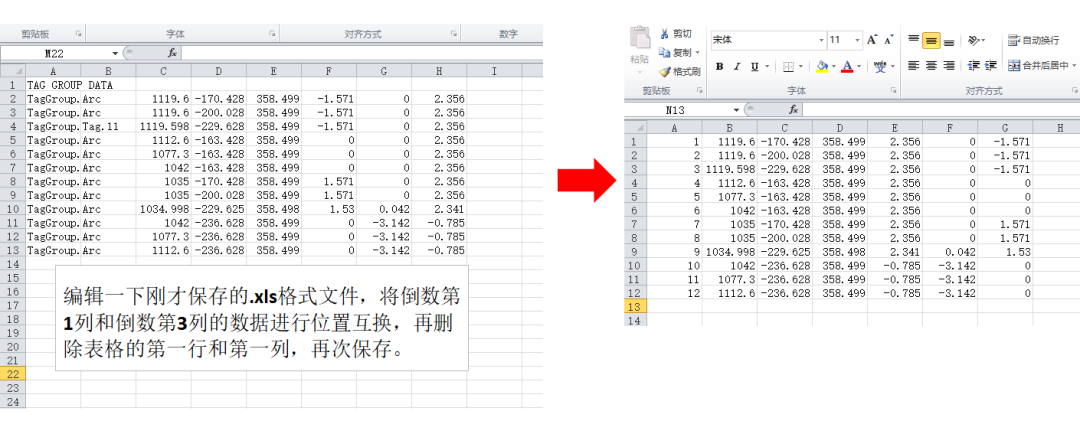
Step6:编辑一下刚才保存的.xls格式文件,将倒数第1列和倒数第3列的数据进行位置互换,再删除表格的第一行和第一列,再次保存。
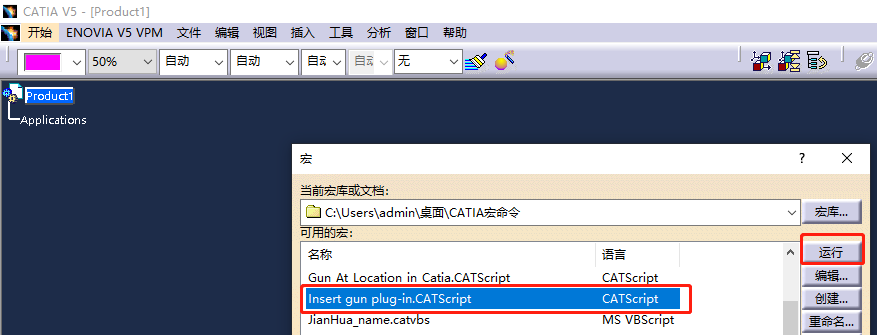
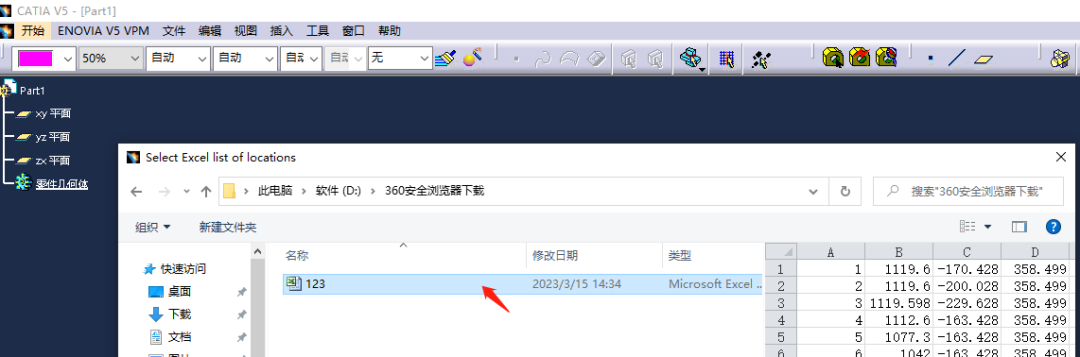
Step7:①打开【CATIA软件】,创建【Product】装配体,并运行焊枪的宏命令脚本;
②打开刚刚编辑好保存的焊点.xls格式文件;
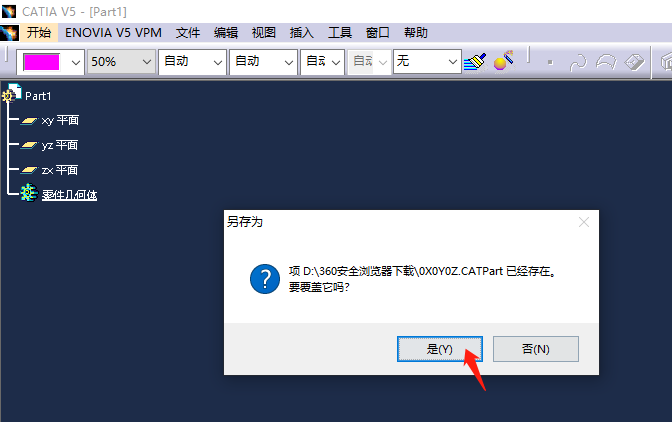
③点击【是】;
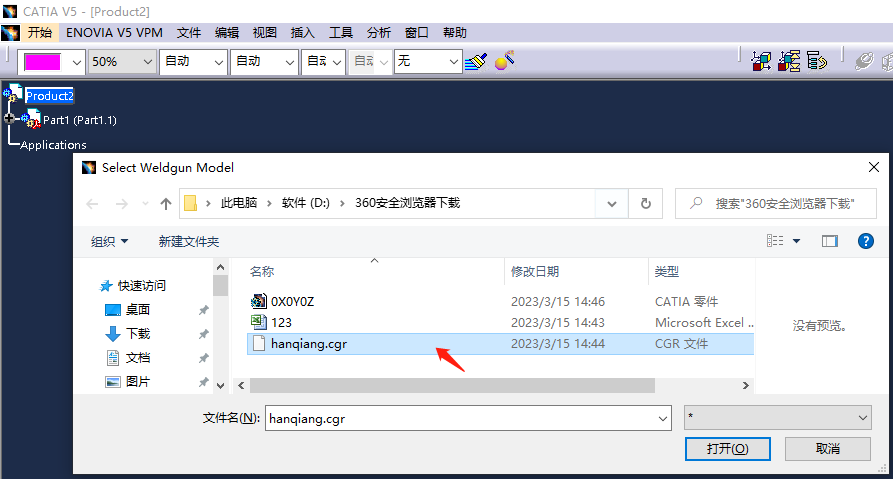
④打开焊枪cgr.格式的文件;
即可获得批量导入焊枪的姿态数据。
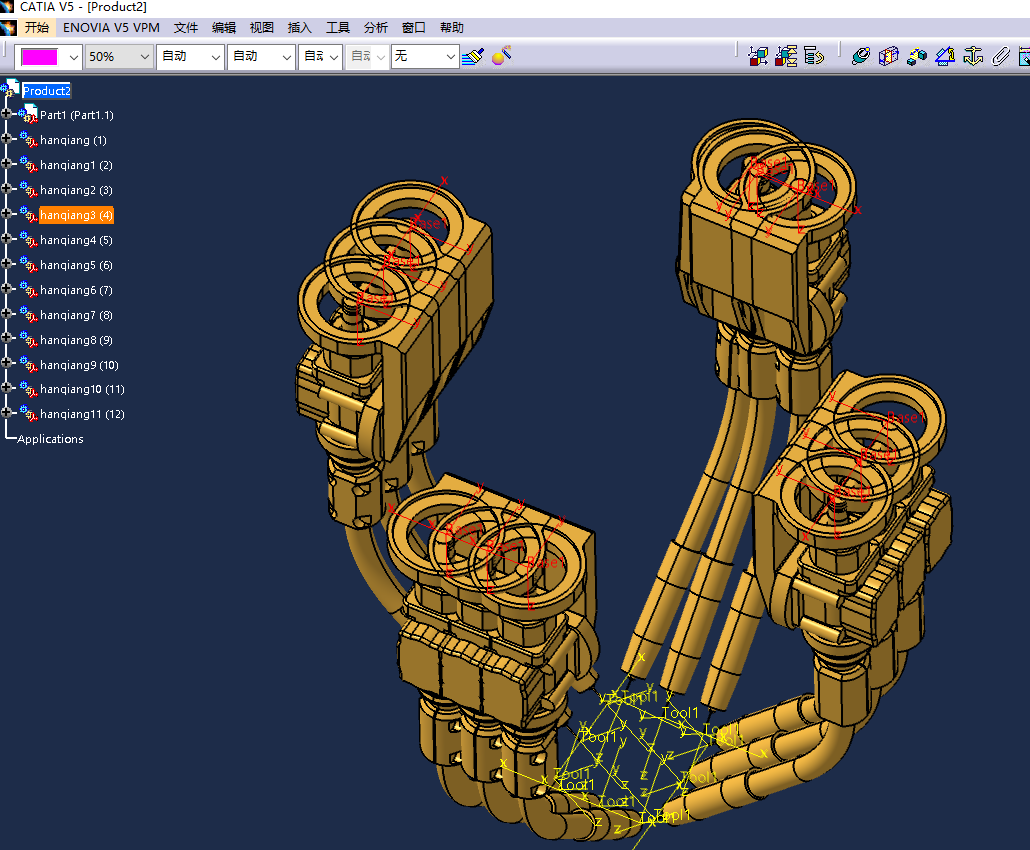
Step8:创建【Product】装配体,将焊枪姿态及夹具放进去,即可看到焊枪姿态与夹具间的间隙确认。如果夹具与焊枪不在原点位置,放进去后要将焊枪姿态装配过去才能使用。
最后分享批量导入焊枪的宏命令脚本:
下载链接:https://pan.baidu.com/s/1uCngiQCizxtsjIf9TTtoPg?
提取码:后台回复“插枪宏命令脚本”即可获得
此次分享就到此结束了!码字不易,欢迎点赞分享!

















 6826
6826

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









