







接着上一节焊枪选型完成后,接下来进行焊枪的安装和机器人可达性的操作,主要使用装置任务定义模块下的设备管理工具条,具体操作如下:
1、焊枪安装:将Delmia软件切换到装置任务定义模块,调出设备管理工具条,点击设置工具命令打开机器人装饰对话框,选择机器人和对应的焊枪,这里需要注意的是焊枪需要在装置创建模块下面定义好Base坐标和Tool坐标,才能被选中安装到机器人,最后点击应用按钮焊枪自动安装到机器人法兰,此时可通过罗盘调整焊枪的姿态,完成后点击确定按钮,如下图所示按序号进行操作;

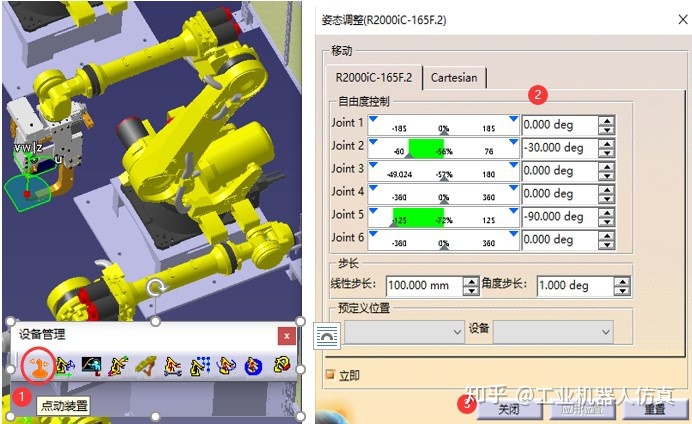
2、设置机器人工作原点:新加载的机器人其姿态都处于机器人Home位置,这时我们需要调整机器人的姿态到合适的位置,并保存此状态作为机器人的工作原点。点击设备管理工具条中的点动装置命令,打开姿态调整对话框,罗盘出现在焊枪Tool坐标位置,调整机器人的姿态到合适的位置,将其作为机器人工作原点,完成后关闭姿态调整对话框,如下图所示;
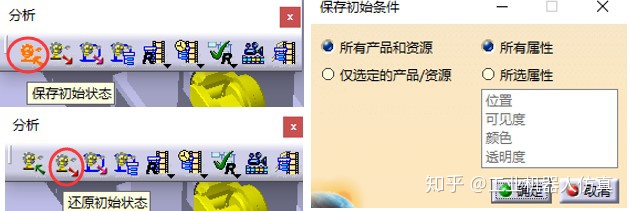
3、设备初始状态:点击分析工具条中的第一个命令保存初始状态,弹出保存初始条件对话框后点击确定按钮,将所有产品和资源以及所有属性的当前状态进行保存,若资源位置、姿态发生改变需要恢复到初始位置,可点击分析工具条中的第二个命令还原到初始状态,如下图所示;
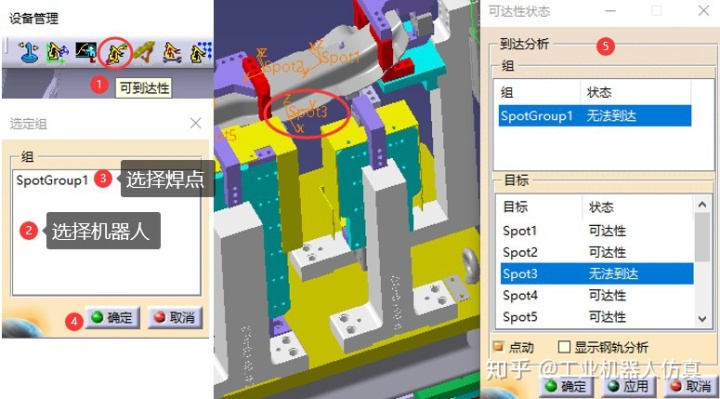
4、机器人可达性检查:点击设备装置工具条中的可到达性命令,先选择机器人弹出选定组对话框,然后选择焊点点击确定按钮,弹出可达性状态对话框,可以看到Spot3机器人无法到达焊接位置,此时我们可以尝试调整进枪方向,首先关闭可达性状态对话框,将Spot3的进枪方向调整为和Spot2一致,然后再次查看机器人可达性;
在夹具和机器人相对位置还没有确定下来的情况下,若通过调整进枪方向机器人仍然无法到达焊点Spot3,此时就可以调整机器人或者夹具的位置,来使机器人可以焊接所有的焊点。Delmia软件中有机器人智能放置功能,通过设定机器人放置的范围,然后由软件自动计算机器人在哪些位置可以焊接,然后确定机器人的最佳放置位置,此功能将在下一节进行讲解;
以上就是Delmia软件中焊枪的安装和注意事项,以及仿真项目初始状态的保存、机器人焊接可达性的检查等操作步骤。
工业机器人仿真:Delmia机器人仿真编程 点焊仿真 第5节 手动焊钳选型及2D截面zhuanlan.zhihu.com
本文由工业机器人仿真原创,欢迎关注,我们一起长知识!
以上内容禁止私自盗版发布、搬运到其他平台,可直接分享转载,谢谢!















 4566
4566











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









