






论文分享:
这是一篇关于无人机环境探索的论文,文中采用了FIS的结构描述未/已知环境的边界,利用分布规划的方法实现无人机运动指导,探索未知区域。
论文链接如下:
 http://FUEL
http://FUEL运动规划:
这篇论文后续的运动规划是按照之前产生的视点和经过覆盖率评估后的最佳视点进行的。
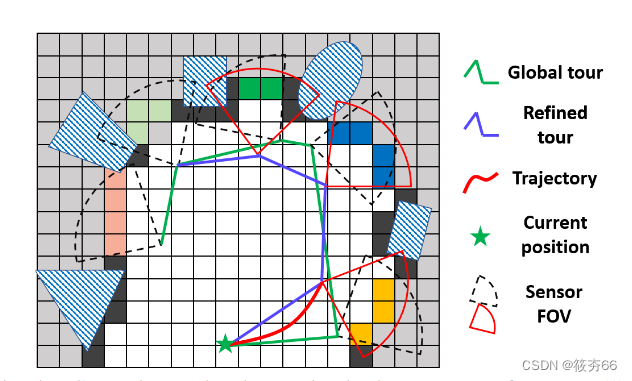
这里的探索过程分为三步,全局探索、局部重定义、轨迹优化三步。
全局探索,利用每个FIS的最佳视点构建了TSP问题。传统的TSP问题都是商人从出发点路径各个城市后返回,而任务不需要返回,因此原作者设置了任何一点返回出发点的代价为0,这样就是一个虚拟的返回问题,实际上无人机不返回。其次就是构造TSP问题的邻接矩阵,这里视点间的代价就是最小时间,而出发点与各个视点见,论文中加入了初始转角的代价,即不希望无人机出发就是一个大角度转弯。具体如下。

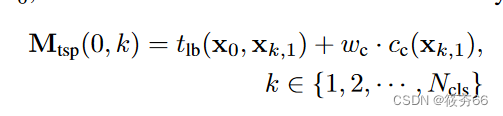

这里的cos就是一个向量点乘的公式。
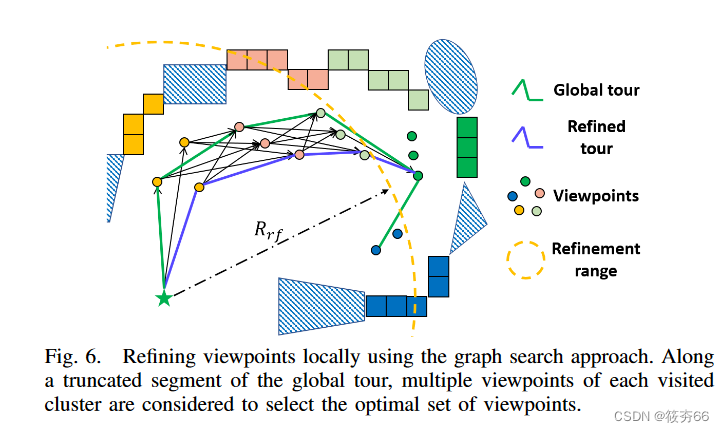
这样就探索出了,全局关于那个最小时间指标的最优路径,但是在飞行时,局部并不一定是最优的,为此我们设置一个局部规划区域,半径为R_rf。并在这个区域内,对每个FIS去除其前m个(待定)最佳视点,并利用这些视点构建了图搜索问题,仍然以最小时间t为代价,这里可以应用Dijkstra算法,即在每个FIS内选取一个使得总体时间最小。这就获得了局部路径。
最后,就是对局部路径点及区域外的全局路径部分,进行轨迹优化。论文中采用的是Fast-Planner的运动规划算法,采用了B样条曲线进行了轨迹的优化。该部分不是本文的主要研究内容,想了解的可以去搜索主讲这个的文章。这个运动规划博主也研究过,指点没入坑就没写过推文,大家感兴趣的话评论私信我,人数多的话,我就出一个运动规划的系列。
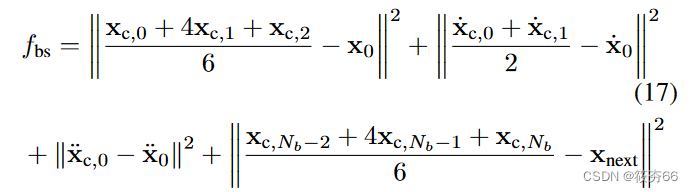
优化函数采用:

以上各项分别为光滑、时间、碰撞、速度、加速度、初始终止限制。
如上图所示,绿色是TSP求得的全局路径,蓝色是局部重规划的,红色是产生的轨迹。
最后,指出以下,这个文章应用了B样条全部的控制点,而为了保证样条曲线必须连接出发点与终止点,因此需要对最初的几个控制点,以及最后的几个控制点加以限制,即
总结:
至此,这篇文章就梳理完了。
这篇文章的关键部分是FIS的结构,边界的更新方法,视点产生与覆盖率评价。而后的视点TSP全局搜索、局部重规划、轨迹优化就属于运动规划的部分啦。
如果反馈好的话,后续更新代码解读。
先赞后看养成习惯!本系列文章免费,发放三天内请勿转载,后续转载请加入博主链接。




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











