






论文分享:
这是一篇关于无人机环境探索的论文,文中采用了FIS的结构描述未/已知环境的边界,利用分布规划的方法实现无人机运动指导,探索未知区域。
论文链接如下:
 http://FUEL
http://FUELFIS结构:
FIS是一种边界信息结构,包含了已知区域与未知区域分解的分界栅格点,栅格点的中心位置,包围栅格的AABB盒(Axis-aligned bounding box),视点(viewpoints,这个很重要),连接代价(用于后续规划)。
该结构的重要算法包括边界栅格点的更新方式:
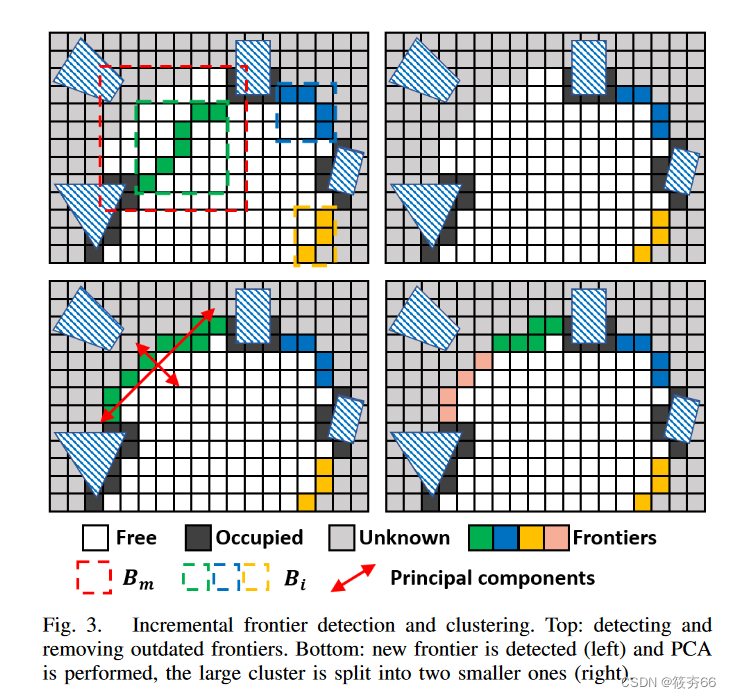
如上图所示,最开始为三个颜色的区域边界,这样建立完全包围切合的长方形(2维),这时就得到了三个AABB盒。传感器获得新的数据后,这时建立一个新感知区域的AABB盒,这里新的感知区应该取得是原本未知现在已知的区域。随后将新建AABB盒与原有AABB盒进行依次对比处理,将不在包含边界信息,如绿色的盒子删掉。并扫描出新的边界。判断如果边界的群过大,那么采用主元分析的方法,将其沿第一主轴拆分为两个聚类。
步骤可以描述为(每个AABB都包含在了对应的一个FIS):
1、建立边界包围的AABB盒。
2、获取传感器信息,将新感知区域建立AABB盒。
3、对比原有AABB与新AABB交集情况,删除不含边界的AABB盒。
4、利用剩余的AABB盒(FIS)更新边界。
5、判断新AABB(FIS)对应边界大,若过大则主元分解。
这样就完成了,对已知区域与未知区域的边界划分,其中边界过大就分解的策略的初衷是,为了后续能够有更多的视点,这样规划就会更细致。
视点建立与覆盖率指标:
下一个关于FIS中重要的元素为视点 ViewPoints。这个视点是后续用来作为运动规划的运动参考点的。

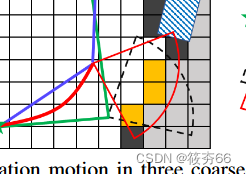
视点的定义及选取方式可以按照上图来解释,例如在一个黄色边界区域,以区域中心为轴线,做一个圆柱体,并在圆柱体内部取得一些列离散点,这些点加入两个属性(p,yaw),其中p表示x,y,z的位置。
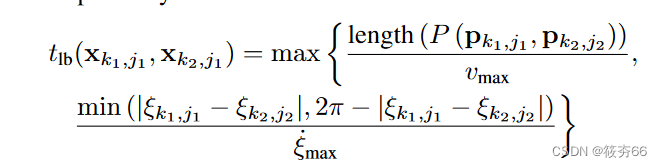
基于此,有设计了两个视点间运动的代价,或者说最小时间,这个指标用于构造TSP问题时,作为两个城市节点见的代价值。这个代价值很好理解,选择位置/最大速度和角度/最大角速度的最大值来作为最小时间代价。上式t(X,X)中的第二个X的下标写错了,不是j1应该是j2。
那么,为了规划使用,那些视点是有价值的呢,或者说价值更大呢,为了描述这一个问题,给出了视点覆盖率的概念,这里引用论文原文:
覆盖率被评估为符合传感器模型且未被占用体素遮挡的前沿细胞的数量。
解释以下,这里的传感器模型可以认为是传感器能够感知的范围,如一个圆锥体。前沿细胞,就是指边界栅格。那么如下图,红色和黑色虚线,便是那个视点的传感器感知范围,而黄色的点就是前沿细胞,由于这个图来自运动规划示意图,因此这两个点都是“好视点”,可以看出他们的感知范围基本都包含了三个边沿点,也就是他们的覆盖率很高。假设同样在这个区域,而你的视点是看向左侧的,那么你的覆盖率为0。因此,以这种覆盖率为指标,能够选取令无人机到达此处后,经可能多地获得边界信息的运动节点。
至此,可以获得各个边界模块,FIS结构,对应的最佳视点,或者一系列的较优视点。以及各个视点见的最小时间代价。这样我们也就构建了TSP,旅行商问题。
总结:
本文,讲解了关于FUEL中关于地图信息保存结构FIS的存储更新方式与视点的选取与评估方式。这两点为后续的规划起到重要的基础作用。
先赞后看,养成习惯!!!谢谢喽。本系列文章免费观看,记得给赞关注支持一下哦。后续持续更新论文与代价解读。



















 969
969

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











