







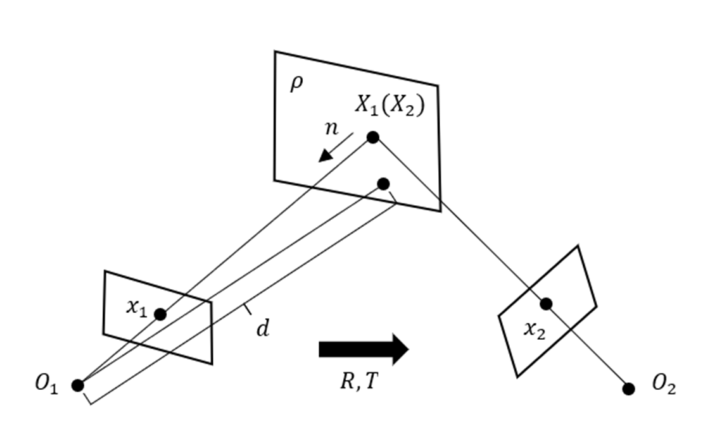
单应矩阵的定义是一个平面到另一个平面的映射
如上图所示,O1与O2时相机不同位姿下两个相机坐标系的原点,R和T分别表示两个坐标系之间的旋转和平移矩阵,平面p上的一点在两个坐标系下的的坐标为X1和X2,投影到像素坐标分别为x1和x2。设平面p的法向量为n,并且p到坐标系O1的距离为d,则p可以表示为

将这个式子变换为

与此同时,X1与X2的关系可以表示为

将上述两个式子合并表示成

设两个相机坐标系的单应矩阵为H’,则H’可以表示为

结合上述两个式子,则

为了得到单应矩阵H',我们需要将X1和X2转换到像素坐标系中,设K为相机的内参数矩阵,则

将(7)代入(4),得

由于单应矩阵为3x3矩阵,具有尺度不变性,设尺度因子为α,则(8)的归一化表达式为

将(9)展开得
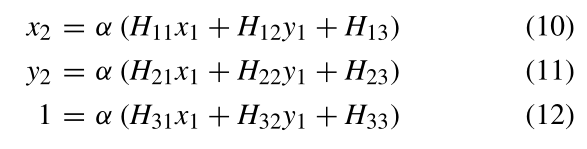
将(12)与(10)和(11)结合得


因为单应矩阵得自由度为8,因此只需要四对匹配点就可以求解相机的单应矩阵,然而由于图像中存在许多动态特征点和噪声点,求解的单应矩阵鲁棒性较差。















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









