







本来想写篇简单的科普,后来想想还是认真写篇有货的,还是对初学者不太友好。
正常随着SLAM,VIO或别的多传感器融合融态工作的深入,因子图的运用和落地会成为核心中的核心。要做好SLAM,必须掌握因子图运用。最好天天画:)
否则很难从代码和工程关联中完成对应工作,首先感谢SLAM大神们的paper让我们意识到了因子图的重要!
先举一个ICE-BA的例子(来自于崔华坤博士的ICE解析,全文较复杂写得很棒,节选和简化个人理解):
首先得明白,常用的SLAM或VIO因子中,顶点往往是相机或路标,边是残差,在一些进阶的系统中顶点会有些变化。
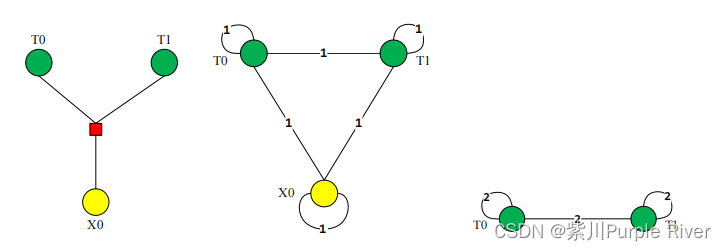
这是个最简单的例图,T代表相机位姿,X代表路标。
小红方块代表残差关联3个因子,到中间例图去掉了它转换为了6个影响(在各自的顶点与边),最后Margin掉路标形成了标准的位姿图Pose Graph,体现出共视关系,这在纯V-SLAM中是基础知识。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









