






车辆姿态主要的传感器
加速度计,陀螺仪,磁力计,方向盘转角等(本章主要讲前三种)
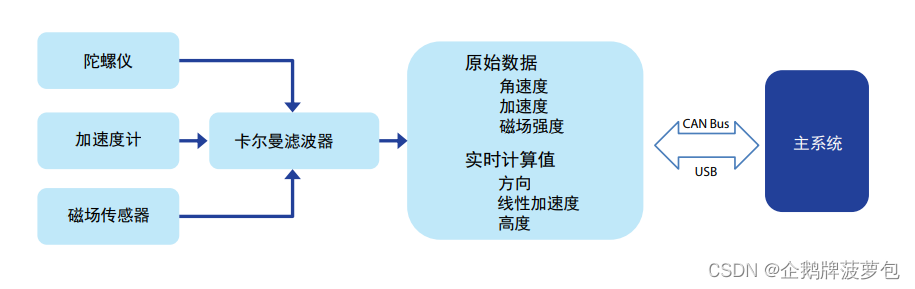
阿路比姿态传感器

集成三轴加速度计、三轴陀螺仪、三轴磁力计、气压传感器以及 温度传感器
在汽车姿态测量中,主要用到的模块有陀螺仪、加速度计和磁力计
三轴加速度计
加速度计,顾名思义就是用于测量加速度的仪器。3轴加速度传感器可以测量单个加速度,即轴上的加速度(X轴,Y轴或Z轴),加速度计主要是测量设备的受力情况,也就是三轴运动情况。
三轴陀螺仪
陀螺仪可以测量围绕轴的旋转角速度,并且,其规模已经缩小到颗粒大小,低功耗,在消费电子产品广泛应用。
( 加速度计和陀螺仪的工作原理:
加速度计、陀螺仪的工作原理和数据融合 · 给新手的两轮自平衡小车开发实战指南 )
三轴磁力计
可用于测试磁场强度和方向,定位设备的方位,磁力计的原理跟指南针原理类似,可以测量出当前设备与东南西北四个方向上的夹角。
综合:
所以,陀螺仪知道“我们转了个身”,加速计知道“我们又向前走了几米”,而磁力计则知道“我们是向哪个方向”的。
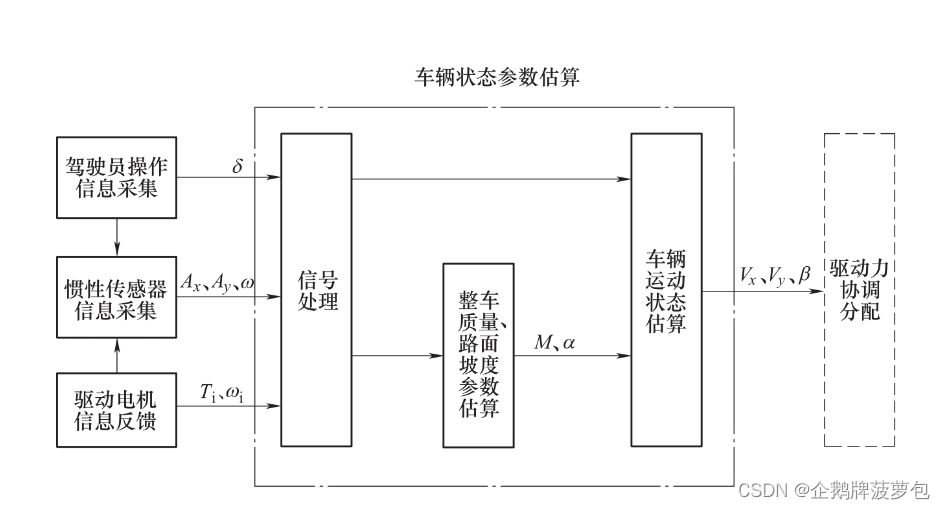
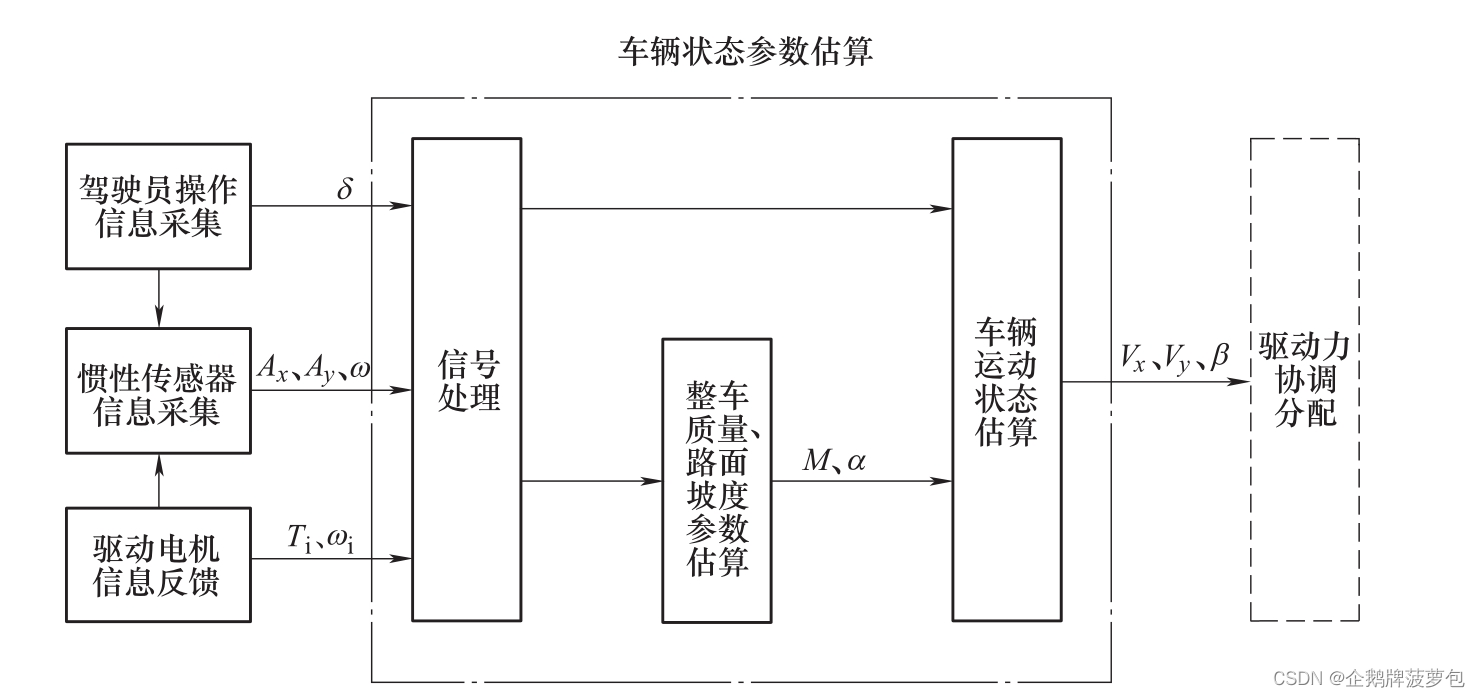
车辆状态参数估算(引用自《轮毂电机分布式控制技术》)
输入:纵向加速度Ax,侧向加速度Ay(三轴加速度计);
横摆角速度ω(三轴陀螺仪)
加速踏板开度kpd,方向盘转角δ
输出:纵向车速Vx、侧向车速Vy,质心侧偏角β,横摆角速度ω。
航向角,质心侧偏角和横摆角是什么(http://t.csdn.cn/pgJ2E)
通过对控制目标横摆角速度ω及质心侧偏角β的期望值和实际值的误差进行模糊控制等,制定整车期望横摆力矩及总驱动力。
驱动力分配模块将整车期望横摆力矩及总驱动力控制需求通过各类约束条件和分配方法转换为四轮的独立需求转矩。
驱动防滑模块以纵向车速Vx和轮速ωi为输入,以控制车轮滑移率为目标,最终确定各轮需求转矩T
 自此我们可以依据车身的姿态求出其状态参数,并根据我们的控制需求及各类约束得到各个电机的需求扭矩从而进行控制。
自此我们可以依据车身的姿态求出其状态参数,并根据我们的控制需求及各类约束得到各个电机的需求扭矩从而进行控制。















 4990
4990











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









