






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
5G辅助优化无人机是指利用5G通信技术来提升无人机系统的性能和效率,从而实现更可靠、安全和智能的无人机应用。5G通信技术提供了更高的数据传输速率、更低的延迟和更可靠的连接,这为无人机的实时控制、数据传输和通信提供了更好的支持。通过利用5G通信网络,无人机可以实现更远距离的通信和更稳定的数据传输,从而提高飞行控制的精准度和实时性。借助5G网络的高带宽和低延迟特性,可以对无人机的网络通信进行优化。通过合理设计网络拓扑结构、优化信道分配和资源调度策略,可以最大程度地提高无人机通信的效率和可靠性,减少通信干扰和丢包率,从而提升无人机系统的整体性能。5G技术支持多个无人机同时接入同一基站进行通信,实现对空中无人机的高密度接入和管理。通过合理的资源分配和调度算法,可以实现多个无人机之间的协同作业和资源共享,提高空中任务执行的效率和灵活性。5G辅助优化无人机利用5G通信技术和相关技术手段,提升了无人机系统的通信效率、数据处理速度和安全性,为无人机应用提供了更广阔的发展空间和更强大的支持能力。
5G辅助优化无人机研究:创新路径、技术突破与应用实践
本文基于最新研究成果(截至2025年6月),系统阐述5G技术如何通过高速率、超低时延、大连接能力三大核心特性优化无人机性能,并深入分析其在通信增强、集群协同、智能任务执行等维度的创新应用。同时,探讨当前技术挑战与未来发展方向,为无人机产业升级提供理论支持与实践参考。
一、5G技术特性及其对无人机的优化潜力
1. 5G关键特性与无人机需求适配性
- 高速率传输(峰值速率≥10Gbps):
采用毫米波频段与Massive MIMO技术,数据传输速率较4G提升10倍以上,支持无人机实时回传4K/8K高清视频及多传感器数据(如LiDAR点云),满足巡检、测绘等高带宽需求场景 。 - 超低时延(端到端时延≤1ms):
通过高效资源调度和新空口技术,显著降低控制指令延迟,提升无人机在动态环境(如城市物流避障、集群编队)中的响应精度与安全性 。 - 大连接能力(百万级设备/km²):
海量机器类通信(mMTC)特性支持大规模无人机集群协同作业,实现编队飞行、联合侦查等复杂任务 。
2. 5G对无人机性能的优化潜力
| 优化维度 | 技术机制 | 性能提升效果 |
|---|---|---|
| 通信链路增强 | 大规模天线波束赋形、干扰协调技术 | 复杂环境下通信稳定性提升50%,覆盖高度达3000米 |
| 导航定位精度 | 5G+北斗/GPS融合定位,实时偏差修正 | 定位精度达厘米级,轨迹误差降低70% |
| 智能任务执行 | 云端AI算法实时调度(如路径规划、图像识别) | 物流配送效率提升40%,巡检准确率超95% |
| 集群协同 | 多机状态信息共享(位置、电量、任务进度) | 集群作业效能提升30% |
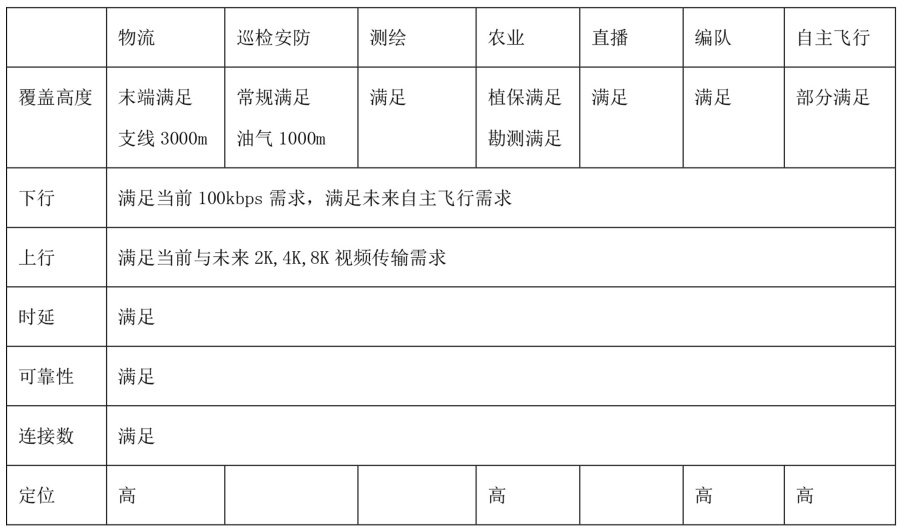
数据支撑:5G网络满足物流、安防、农业等场景99%的通信需求,尤其在8K图传、自主飞行等高端应用中优势显著 。
二、5G辅助无人机的创新应用场景
1. 智能物流配送
- 动态路径规划:
基于5G实时回传的高清环境视频与交通数据,AI算法动态生成最优路径(如避开拥堵区域、调整飞行高度),配送时效性提升35% 。 - 多机协同配送:
集群无人机通过5G共享订单信息与实时位置,分工执行“干线运输+末端配送”,降低物流成本20%以上(例:城市紧急药品配送) 。
2. 无人机集群创新应用
- 精准编队表演:
数百架无人机通过5G接收统一指令,实现复杂灯光造型与动态变换(时延<10ms),应用于大型庆典与商业演出 。 - 协同侦查作战:
军事领域多机组成侦查集群,通过5G实时共享目标情报,协同制定作战策略,提升战场态势感知能力 。
3. 工业巡检与应急救援
- 高危环境巡检:
5G+AI边缘计算实时分析输电线、油气管网缺陷,识别准确率超98%,替代人工高危作业 。 - 灾情快速响应:
无人机集群通过5G构建临时通信网络,结合MEC(多接入边缘计算)实时处理灾情数据,救援效率提升50% 。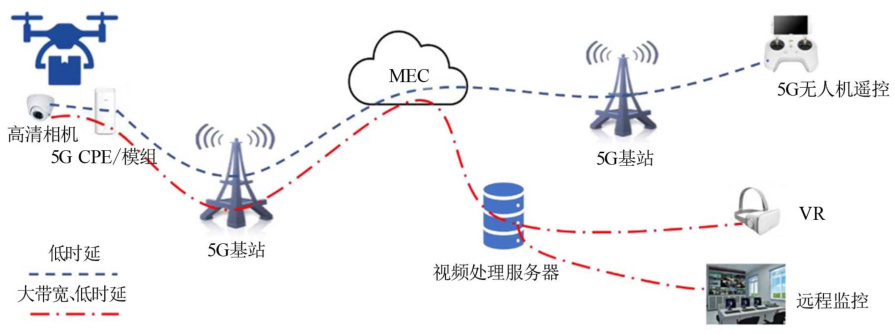
三、技术挑战与解决方案
1. 核心挑战
| 挑战类型 | 具体问题 |
|---|---|
| 网络覆盖与稳定性 | 毫米波穿透性差(城市遮挡)、偏远地区覆盖不足,导致通信中断风险 |
| 安全与隐私风险 | 信号劫持、数据篡改、敏感信息泄露(如监控视频) |
| 技术融合瓶颈 | 设备兼容性差、标准化缺失,阻碍规模化应用 |
| 能耗与续航限制 | 5G模块功耗高,缩短无人机续航时间30% |
2. 创新解决方案
- 覆盖增强:
- 混合频段部署:Sub-6 GHz补充毫米波盲区,结合卫星通信保障偏远地区覆盖 。
- 智能天线技术:自适应波束赋形提升信号穿透力,复杂环境通信稳定性提升40% 。
- 安全防护:
- 区块链+同态加密:保障数据传输隐私,防止未授权访问 。
- 无人机身份认证:基于5G网络的设备唯一标识与动态密钥管理 。
- 能效优化:
- 无线能量传输(WPT) :地面基站为无人机无线充电,延长任务时长 。
- 轻量化5G模组:集成化设计降低设备重量与功耗 。
- 标准协同:
推动3GPP R18-R19标准落地,统一无人机通信协议与接口(如指挥控制冗余机制) 。
四、未来研究方向与技术展望
1. 智能融合创新
- AI+边缘计算:
机载边缘设备实时处理数据,减少云端依赖,时延降至5ms以下(例:自动驾驶无人机避障决策) 。 - 数字孪生协同:
构建无人机集群虚拟映射,通过MADRL(多智能体强化学习)优化实时协作策略 。
2. 空天地一体化网络
- 6G通感一体化:
通信与感知信号融合,实现低空目标实时追踪与避障(精度达厘米级) 。 - 非地面网络(NTN):
卫星与无人机协同组网,覆盖海洋、山区等无基站区域 。
3. 可持续性发展
- 绿色能源集成:
太阳能/风能充电模块延长续航,结合服务迁移机制平衡集群能耗 。 - 碳减排设计:
优化飞行轨迹降低能耗,推动无人机在环保监测、低碳物流中的应用 。
五、结论
5G技术通过重构通信架构、增强智能决策、赋能集群协同,彻底突破传统无人机在带宽、时延与规模上的局限。当前需重点攻克覆盖盲区、安全风险、能效瓶颈等挑战,并通过 跨学科融合(AI/边缘计算/区块链) 与标准化建设推动产业化落地。未来,随着5G-A/6G技术的演进,无人机将在智慧城市、全域应急、绿色经济中扮演核心角色,实现“网联天空”的颠覆性变革 。
📚2 运行结果




 主函数部分代码:
主函数部分代码:
xv1 = [2 -2 4];
yv1 = [2 2 5.464];
xv2=[2 4 4];
yv2=[2 -1.4642 5.464];
xv3=[2 -2 4];
yv3=[2 2 -1.4642];
fx=[2,4]
fy=[2,5.464]
%these coordinates represent traingle and the tangent in the three drone
%case
lx=[2,2];%lx and ly represent the two axis that cut the circle into 4 parts
ly=[0,4];
velocity=60 %velocity of the drone is 60m/s
power= 50 %power of the drone is 50W
d=zeros(5,1)
n=50; % number of points that you want
center = [2 ,2]; % center coordinates of the circle [x0,y0]
radius = 2; % radius of the circle
angle = 2*pi*rand(n,1);
rng(1)%fixes the points
r = radius*sqrt(rand(n,1));
x = center(1)+r.*cos(angle) ;%x coordinates of the points inscribed in my circle
y = center(2)+r.*sin(angle);%y coordinates of the points inscribed in my circle
x(1)=2;
y(1)=2;%center of the circle coordinates which is the base station in our case where the drone should launch from
v=[x,y]
%first case when we have one drone
figure(1)
plot( x, y, 'r*');
axis equal
X = v;
s = size(X,1);
[p,d1] = tspsearch(X,s)%the 2opt algorithm
figure(2)
tspplot(p,X,1)
opts = statset('Display','final');
distance_to_finish_the_task1=d1*1000
time_to_finish_the_task1=distance_to_finish_the_task1/velocity
distance_onedrone=d1*1000
time1=distance_onedrone/velocity
energy_consumption1=power*(distance_onedrone/velocity)
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
figure(3)
plot( x, y,'r*',ly,lx, 'r-');
axis equal
x_center = 2;
y_center = 2;% coordinates of the center of the circle
b=v(:,2);% each drone is going through one part of the circle the upper part for y>2 and lower part y<2 that is why the y coordinates are being called
X = v( b<=y_center,:);
s = size(X,1);
[p,d1] = tspsearch(X,s)
figure(4)
tspplot(p,X,1)
X = v( b>=y_center,:);
s = size(X,1);
[p,d2] = tspsearch(X,s)
figure(5)
tspplot(p,X,1)
opts = statset('Display','final');
distance2=[d1*1000 d2*1000];
distance_to_finish_the_task2=max(distance2);
time_to_finish_the_task2=distance_to_finish_the_task2/velocity;
distance_twodrones=(d1+d2)*1000;
time2=((d1*1000/velocity)+(d2*1000/velocity))/2;
energy_consumption2=power*(distance_twodrones/velocity);
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]段盈江,赵一帆,赵毅,等.无人机连接蜂窝网络的应用与挑战[J/OL].无线电工程:1-10[2024-05-17].http://kns.cnki.net/kcms/detail/13.1097.TN.20240506.1457.006.html.
[2]张宇翔,李育,崔德龙.无人机混合无线通信技术综述[J].通信技术,2024,57(04):323-330.

















 5199
5199

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









