






一、单个按键读取键值——轮询方式
1.初始化
void Key_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOE,ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_4|GPIO_Pin_3;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOE,&GPIO_InitStructure);
}
2.获取键值操作
重点理解按键消抖的过程:当我们读取到键值变化时,先延迟20ms之后,检测按键是否松手,若没有就一直等待松手,直到松手之后,在延迟20ms,然后再给变量赋键值。
uint8_t Get_KeyNum(void)
{
uint8_t keynum=0;
if(GPIO_ReadInputDataBit(GPIOE,GPIO_Pin_3)==0)//检测按键是否按下
{
Delay_ms(20);//延迟20ms等待按下的机械抖动消除
while(GPIO_ReadInputDataBit(GPIOE,GPIO_Pin_3)==0);//等待按键松手,若不松手则一直while循环等待松手
Delay_ms(20);//延迟20ms等待松开的机械抖动消除
keynum=1;//给变量赋键值
}
if(GPIO_ReadInputDataBit(GPIOE,GPIO_Pin_4)==0)
{
Delay_ms(20);
while(GPIO_ReadInputDataBit(GPIOE,GPIO_Pin_4)==0);
Delay_ms(20);
keynum=2;
}
return keynum;
}3.主函数中调用
通过轮询的方式检测按键,这里注意每次调用函数的时候当按键不按下的时候,键值一直时0。某一时刻按键按下之后便会执行对应的操作,但注意下一次循环依然会把变量keynum赋值为0.
int main(void)
{
OLED_Init();
Key_Init();
Led_Init();
while(1)
{
keynum=Get_KeyNum();
if(keynum==1)
{
LedB_Turn();
}
if(keynum==2)
{
LedE_Turn();
}
OLED_ShowHexNum(1,1,keynum,4,OLED_8X16);
OLED_Update();
if(keynum!=0)Delay_ms(500);
}
}
二、矩阵按键读取键值——轮询方式
原理相同,但是要对键盘进行扫描,这里采用行扫描的方式进行:
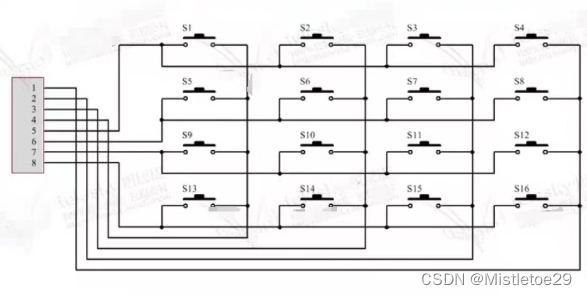

1.端口定义:
#define C4 GPIO_Pin_0
#define C3 GPIO_Pin_1
#define C2 GPIO_Pin_2
#define C1 GPIO_Pin_3
#define R4 GPIO_Pin_4
#define R3 GPIO_Pin_5
#define R2 GPIO_Pin_6
#define R1 GPIO_Pin_72.端口初始化
这里注意如果是按行扫描,那么控制列的端口需要配置成输入模式,控制行的端口配置成输出模式
void Matrix_Key_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin=C1|C2|C3|C4;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure);
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Pin=R1|R2|R3|R4;
GPIO_Init(GPIOA,&GPIO_InitStructure);
}
3.按键扫描——按行扫描
uint8_t Matrix_Key_GetNum(void)
{
uint8_t keynum=0;
GPIO_Write(GPIOA,0X00FF);
GPIO_WriteBit(GPIOA,R1,Bit_RESET);
if(GPIO_ReadInputDataBit(GPIOA,C1)==0){Delay_ms(20);while(GPIO_ReadInputDataBit(GPIOA,C1)==0);Delay_ms(20);keynum=16;}
if(GPIO_ReadInputDataBit(GPIOA,C2)==0){Delay_ms(20);while(GPIO_ReadInputDataBit(GPIOA,C2)==0);Delay_ms(20);keynum=15;}
if(GPIO_ReadInputDataBit(GPIOA,C3)==0){Delay_ms(20);while(GPIO_ReadInputDataBit(GPIOA,C3)==0);Delay_ms(20);keynum=14;}
if(GPIO_ReadInputDataBit(GPIOA,C4)==0){Delay_ms(20);while(GPIO_ReadInputDataBit(GPIOA,C4)==0);Delay_ms(20);keynum=13;}
GPIO_Write(GPIOA,0X00FF);
GPIO_WriteBit(GPIOA,R2,Bit_RESET);
if(GPIO_ReadInputDataBit(GPIOA,C1)==0){Delay_ms(20);while(GPIO_ReadInputDataBit(GPIOA,C1)==0);Delay_ms(20);keynum=12;}
if(GPIO_ReadInputDataBit(GPIOA,C2)==0){Delay_ms(20);while(GPIO_ReadInputDataBit(GPIOA,C2)==0);Delay_ms(20);keynum=11;}
if(GPIO_ReadInputDataBit(GPIOA,C3)==0){Delay_ms(20);while(GPIO_ReadInputDataBit(GPIOA,C3)==0);Delay_ms(20);keynum=10;}
if(GPIO_ReadInputDataBit(GPIOA,C4)==0){Delay_ms(20);while(GPIO_ReadInputDataBit(GPIOA,C4)==0);Delay_ms(20);keynum=9;}
GPIO_Write(GPIOA,0X00FF);
GPIO_WriteBit(GPIOA,R3,Bit_RESET);
if(GPIO_ReadInputDataBit(GPIOA,C1)==0){Delay_ms(20);while(GPIO_ReadInputDataBit(GPIOA,C1)==0);Delay_ms(20);keynum=8;}
if(GPIO_ReadInputDataBit(GPIOA,C2)==0){Delay_ms(20);while(GPIO_ReadInputDataBit(GPIOA,C2)==0);Delay_ms(20);keynum=7;}
if(GPIO_ReadInputDataBit(GPIOA,C3)==0){Delay_ms(20);while(GPIO_ReadInputDataBit(GPIOA,C3)==0);Delay_ms(20);keynum=6;}
if(GPIO_ReadInputDataBit(GPIOA,C4)==0){Delay_ms(20);while(GPIO_ReadInputDataBit(GPIOA,C4)==0);Delay_ms(20);keynum=5;}
GPIO_Write(GPIOA,0X00FF);
GPIO_WriteBit(GPIOA,R4,Bit_RESET);
if(GPIO_ReadInputDataBit(GPIOA,C1)==0){Delay_ms(20);while(GPIO_ReadInputDataBit(GPIOA,C1)==0);Delay_ms(20);keynum=4;}
if(GPIO_ReadInputDataBit(GPIOA,C2)==0){Delay_ms(20);while(GPIO_ReadInputDataBit(GPIOA,C2)==0);Delay_ms(20);keynum=3;}
if(GPIO_ReadInputDataBit(GPIOA,C3)==0){Delay_ms(20);while(GPIO_ReadInputDataBit(GPIOA,C3)==0);Delay_ms(20);keynum=2;}
if(GPIO_ReadInputDataBit(GPIOA,C4)==0){Delay_ms(20);while(GPIO_ReadInputDataBit(GPIOA,C4)==0);Delay_ms(20);keynum=1;}
return keynum;
}
4.主循环调用验证
#include "main.h"
uint8_t keynum;
int main(void)
{
OLED_Init();
Matrix_Key_Init();
while(1)
{
keynum=Matrix_Key_GetNum();
if(keynum!=0)
{
OLED_ShowString(1,1,"KEYNUM: ",OLED_8X16);
OLED_ShowNum(66,1,keynum,2,OLED_8X16);
OLED_Update();
}
}
}
PS:最后发现键值反了,最后倒着把键值改了,不过影响不大
三、矩阵键盘密码锁
实现密码锁逻辑(key1-10表示数字,10代表0,11为确认,12为退格)
#include "main.h"
uint8_t keynum,count;
uint16_t user_input,password;
int main(void)
{
OLED_Init();
Matrix_Key_Init();
OLED_ShowString(0,0,"PLEASE INPUT PASSWORD:",OLED_6X8);
OLED_Update();
password=3030;
while(1)
{
OLED_ShowNum(0,32,count,4,OLED_8X16);
OLED_Update();
keynum=Matrix_Key_GetNum();
if(keynum<=10 && keynum>0 &&count<4&&count>=0)
{
keynum%=10;
user_input*=10;
user_input+=keynum;
OLED_ShowNum(0,16,user_input,4,OLED_8X16);
OLED_Update();
count++;
}
if(keynum==11)
{
if(user_input==password)
{
OLED_Clear();
OLED_ShowString(0,0,"PASSWORD RIGHT!",OLED_6X8);
OLED_Update();
Delay_ms(2000);
count=user_input=keynum=0;
OLED_ShowString(0,0,"PLEASE INPUT PASSWORD:",OLED_6X8);
OLED_Update();
}
else
{
OLED_Clear();
OLED_ShowString(0,0,"PASSWORD ERRO!",OLED_6X8);
OLED_Update();
Delay_ms(2000);
count=user_input=keynum=0;
OLED_ShowString(0,0,"PLEASE INPUT PASSWORD:",OLED_6X8);
OLED_Update();
}
}
if(keynum==12)
{
user_input/= 10;
OLED_ShowNum(0,16,user_input,4,OLED_8X16);
OLED_Update();
count--;
}
}
}















 1051
1051











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









