







一.ROS文件系统
ROS文件系统级指的是在硬盘上ROS源代码的组织形式,其结构大致可以如下图所示:
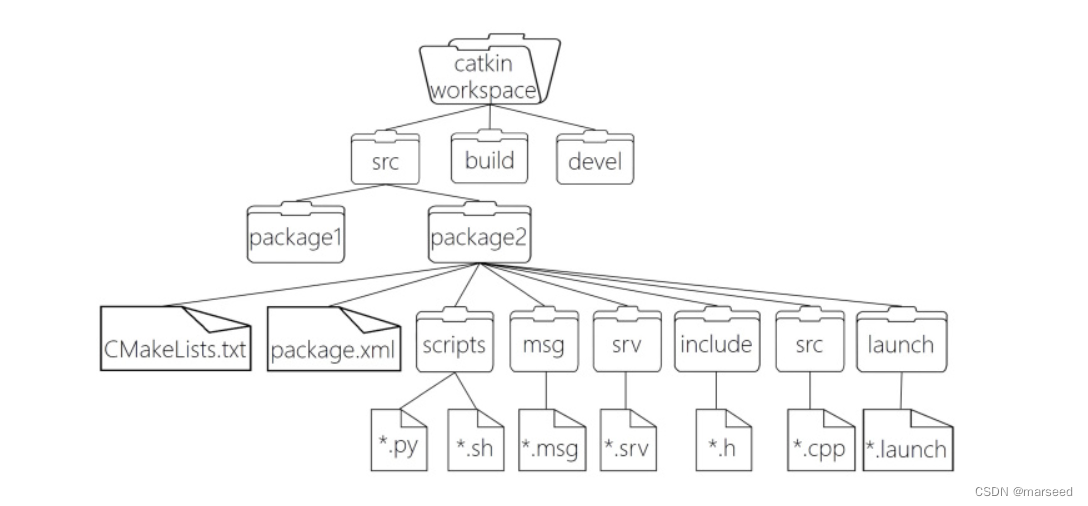
WorkSpace --- 自定义的工作空间
|--- build:编译空间,用于存放CMake和catkin的缓存信息、配置信息和其他中间文件。
|--- devel:开发空间,用于存放编译后生成的目标文件,包括头文件、动态&静态链接库、可执行文件等。
|--- src: 源码
|-- package:功能包(ROS基本单元)包含多个节点、库与配置文件,包名所有字母小写,只能由字母、数字与下划线组成
|-- CMakeLists.txt 配置编译规则,比如源文件、依赖项、目标文件
|-- package.xml 包信息,比如:包名、版本、作者、依赖项...(以前版本是 manifest.xml)
|-- scripts 存储python文件
|-- src 存储C++源文件
|-- include 头文件
|-- msg 消息通信格式文件
|-- srv 服务通信格式文件
|-- action 动作格式文件
|-- launch 可一次性运行多个节点
|-- config 配置信息
|-- CMakeLists.txt: 编译的基本配置
二.ROS计算图
1.简介
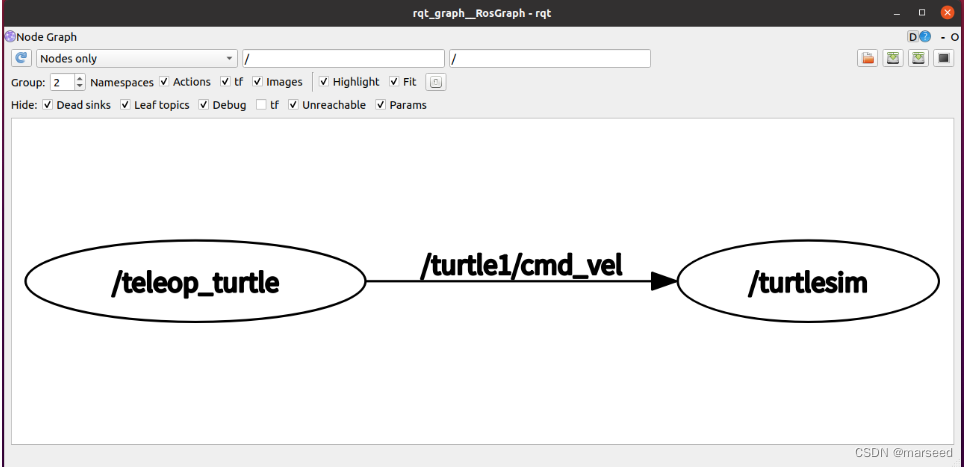
qt_graph能够创建一个显示当前系统运行情况的动态图形。ROS 分布式系统中不同进程需要进行数据交互,计算图可以以点对点的网络形式表现数据交互过程。rqt_graph是rqt程序包中的一部分。
2.计算图安装
先在终端(terminal)中输入
sudo apt install ros-<distro>-rqt
sudo apt install ros-<distro>-rqt-common-plugins
使用ROS版本名称(比如:kinetic、melodic、Noetic等)来替换掉<distro>
再在终端窗口中输入 rosrun rqt_graph rqt_graph
3.计算图演示
启动新终端,键入: rqt_graph 或 rosrun rqt_graph rqt_graph,可以看到类似下图的网络拓扑图,该图可以显示不同节点之间的关系。
三.ROS通信机制
机器人是一种高度复杂的系统性实现,在机器人上可能集成各种传感器(雷达、摄像头、GPS...)以及运动控制实现,为了解耦合,在ROS中每一个功能点都是一个单独的进程,每一个进程都是独立运行的。更确切的讲,ROS是进程(也称为Nodes)的分布式框架。 因为这些进程甚至还可分布于不同主机,不同主机协同工作,从而分散计算压力。
ROS 中的基本通信机制主要有如下三种实现策略:
-
话题通信(发布订阅模式)
-
服务通信(请求响应模式)
-
参数服务器(参数共享模式)















 700
700











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









