







概述
视觉slam十四讲作为经典书籍,习题解答博客很多,避免重复工作,1~4和8题提供了其它博客连接。5、6、7笔者重新推导一遍并整理一些推导细节。
感谢某只郭的誊抄。
- 验证SO(3)、SE(3)和Sim(3)关于乘法成群。
- 验证(R3,R,×)构成李代数。
- 验证so(3)和se(3)满足李代数要求的性质。
- 证明性质( 4.20 ) (4.20)(4.20)和( 4.21 ) (4.21)(4.21)
第四讲习题自测解答:该博客对于上述4道习题做了良好叙述,在此引用此博客,不在过多赘述。
5、证明:
Rp^RT=(Rp)^
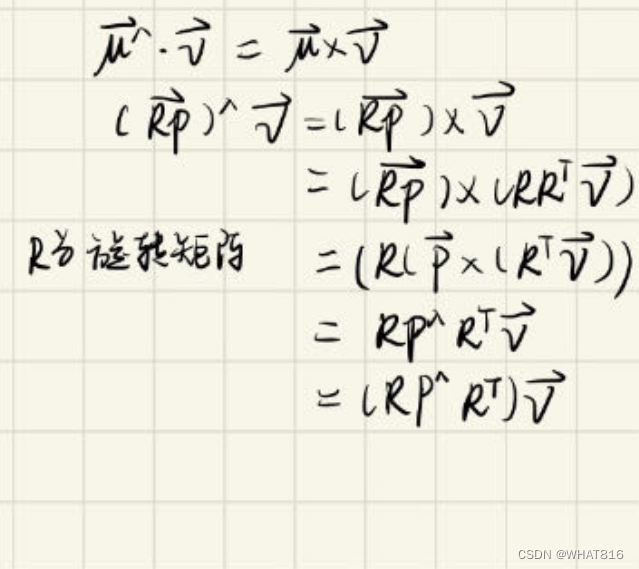
这种证明方式为简单证明。便于理解,复杂详细推导请参考博客SLAM从入门到放弃
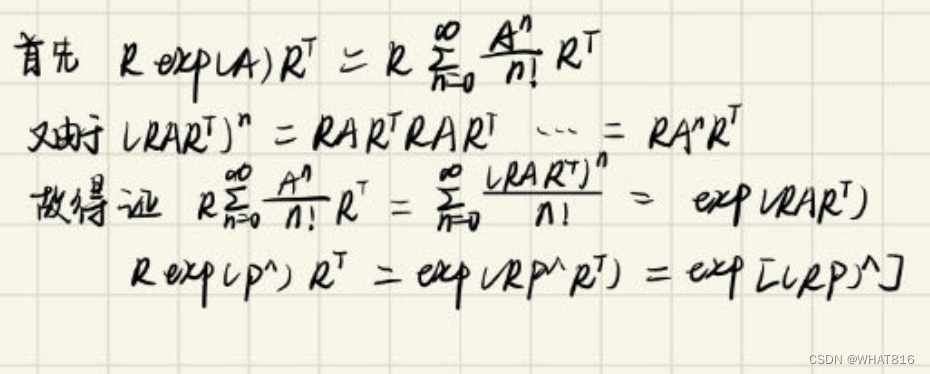
6、证明:
Rexp(p^)RT=exp((Rp)^)
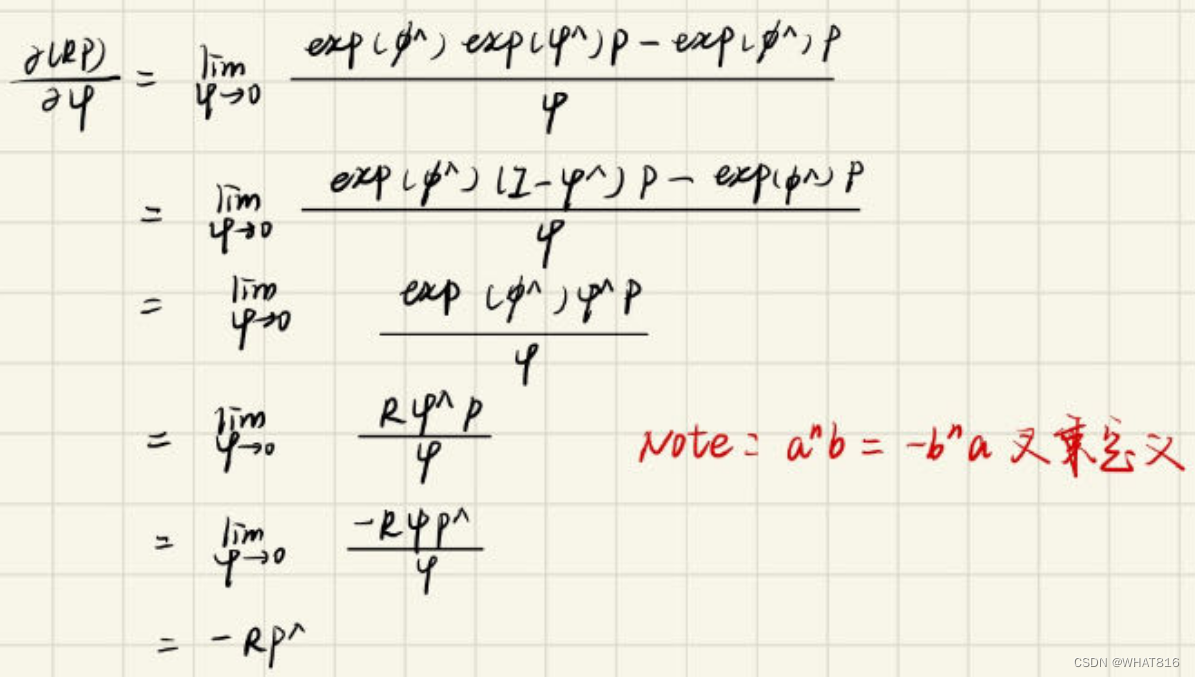
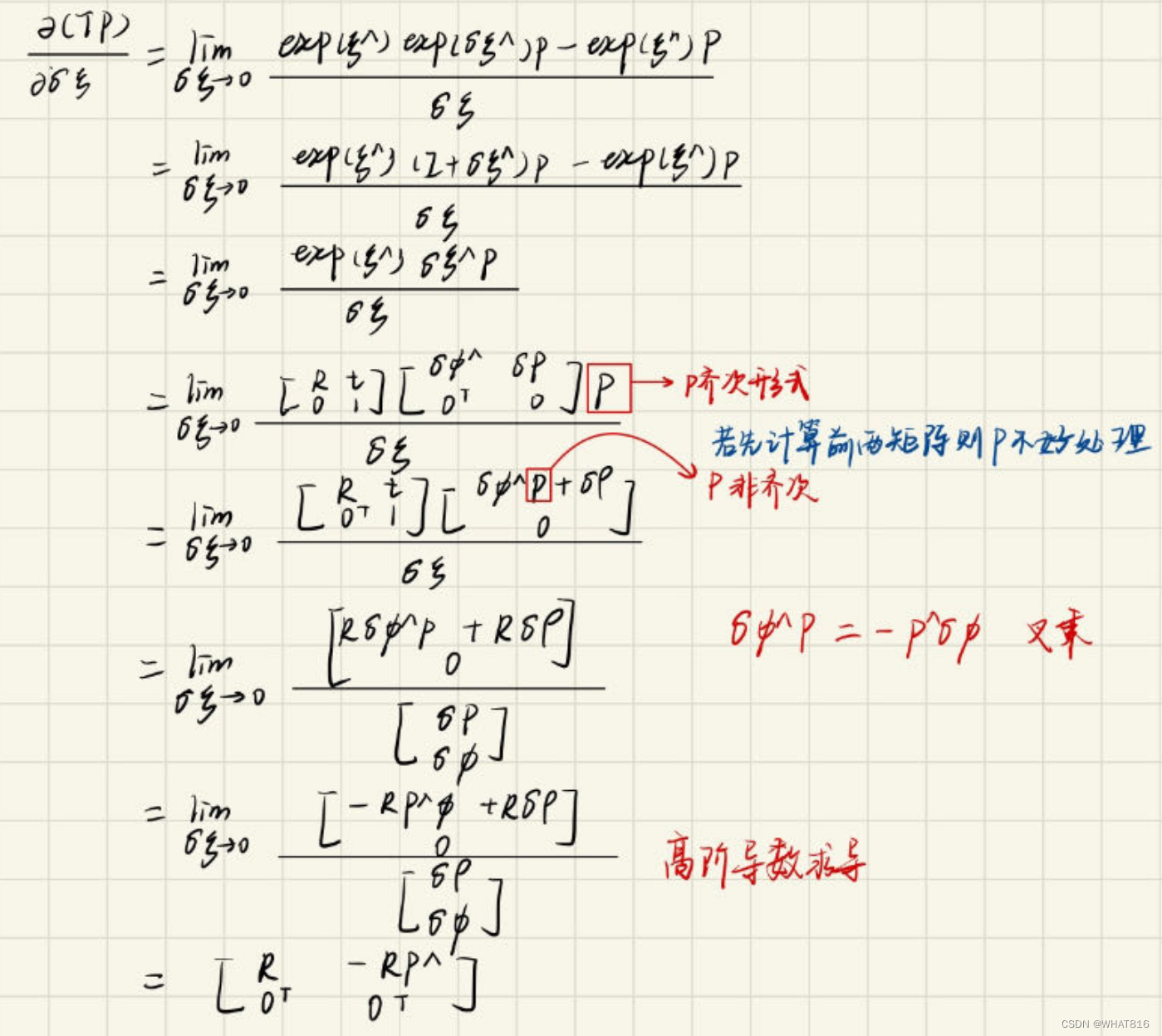
7、仿照左扰动的推导,推导SO(3)和SE(3)在右扰动下的导数
8、搜索cmake的find_package指令是如何运作的。它有哪些可选的参数?为了让cmake找到某个库,需要哪些先决条件?
cmake的find_package指令是如何运行的:该博客对于上述习题做了良好叙述,在此引用此博客,不在过多赘述















 2718
2718











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









