







DS18B20(温度传感器)
其为一款数字温度传感器,测量范围为-55°~125°,本质为一款16位单片机,所以数据位有16位,前5位为符号位,接着7位为整数位,后4位为小数位,由于2^7为126,所以其最大温度为125°,而最小温度为物理性质决定,小数位为4位,所以精度为2^(-4)也就是0.0625°,其有三根引脚,结构图如下:
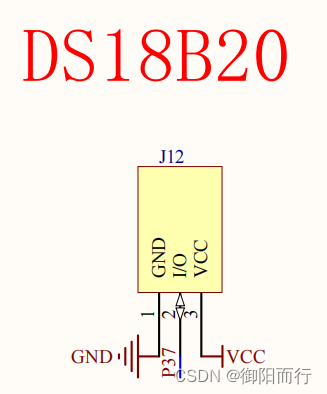
IO通过主机控制,由于只有一根引脚,只可能用单根线通信的方式来首发数据,选择单总线进行主机与从机数据的收发。
单总线
初始化:
操作:首先将线电位置高,接着将其拉低480us以上,然后释放总线(将其置高)
现象:等待15~60us后,从机会响应一个60~240us的低电平,然后也置高。
发送数据
操作:主机将总线拉低60~120us,表示发送0;拉低1~15us,表示发送1;发送完数据后将总线拉低30us,从机才能接受数据,每次发送时间应该大于60us。
接收数据
操作:主机将总线拉低1~15us,然后释放总线,接着开始读取数据&
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 308
308

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









