







通信协议简介
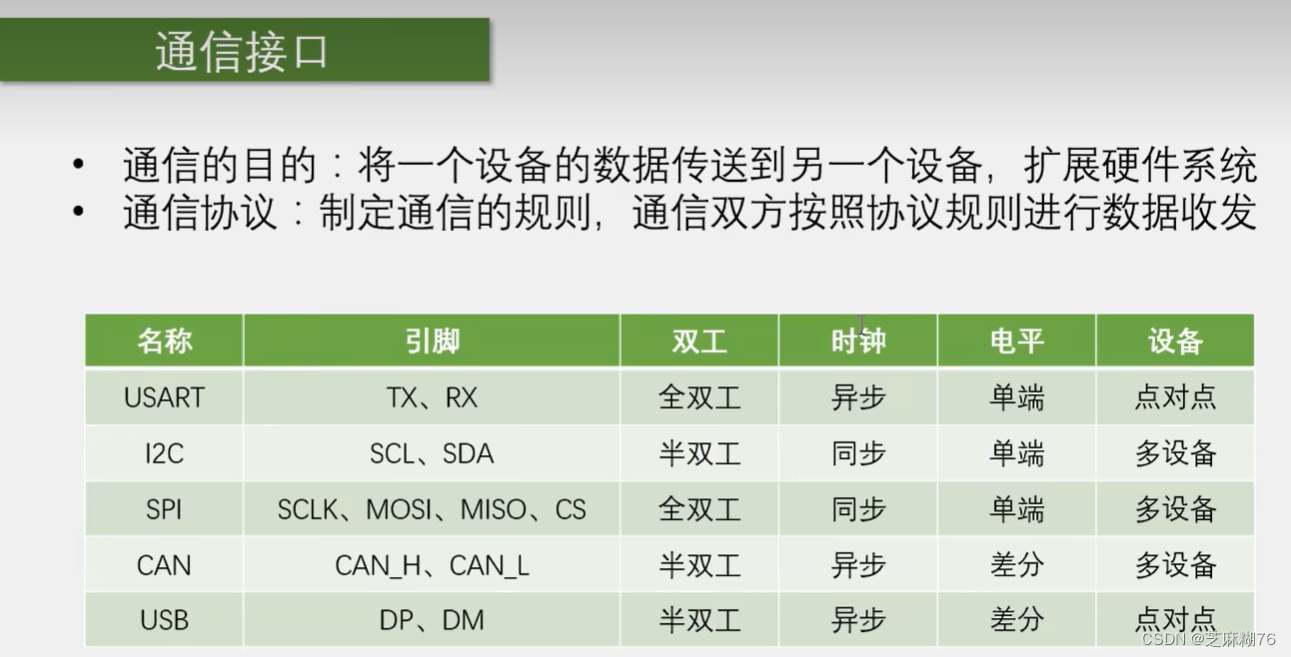
USART串口
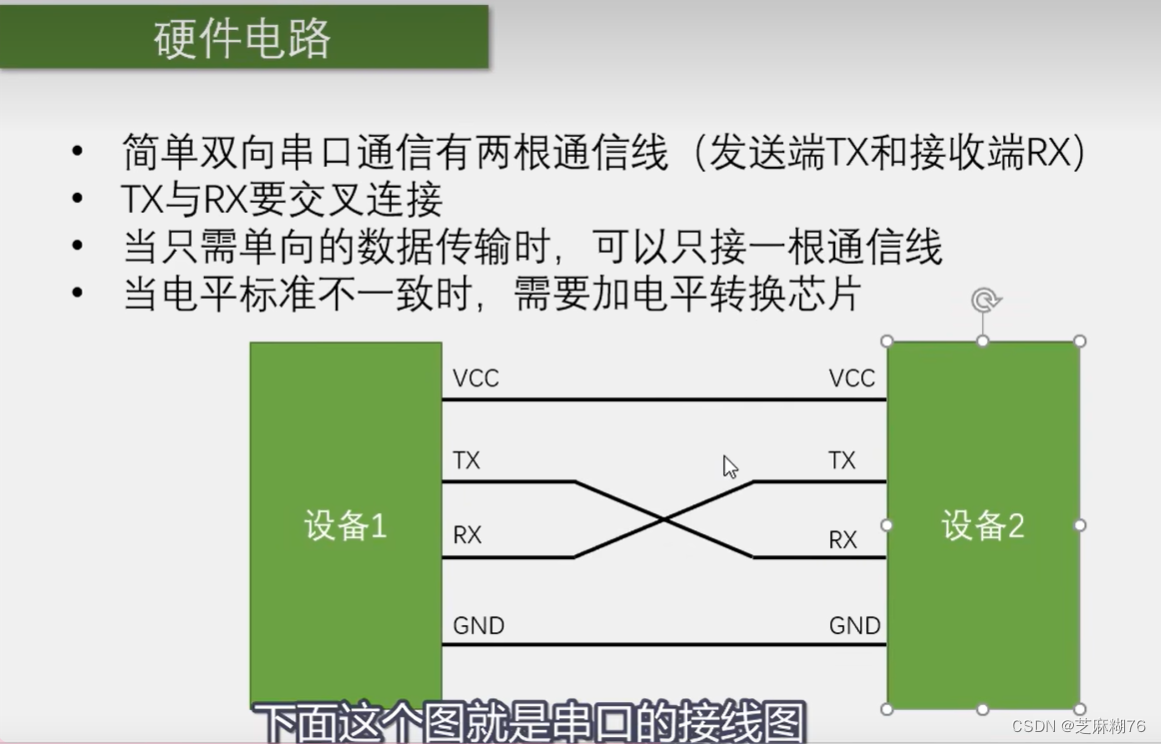
硬件电路
通信距离:
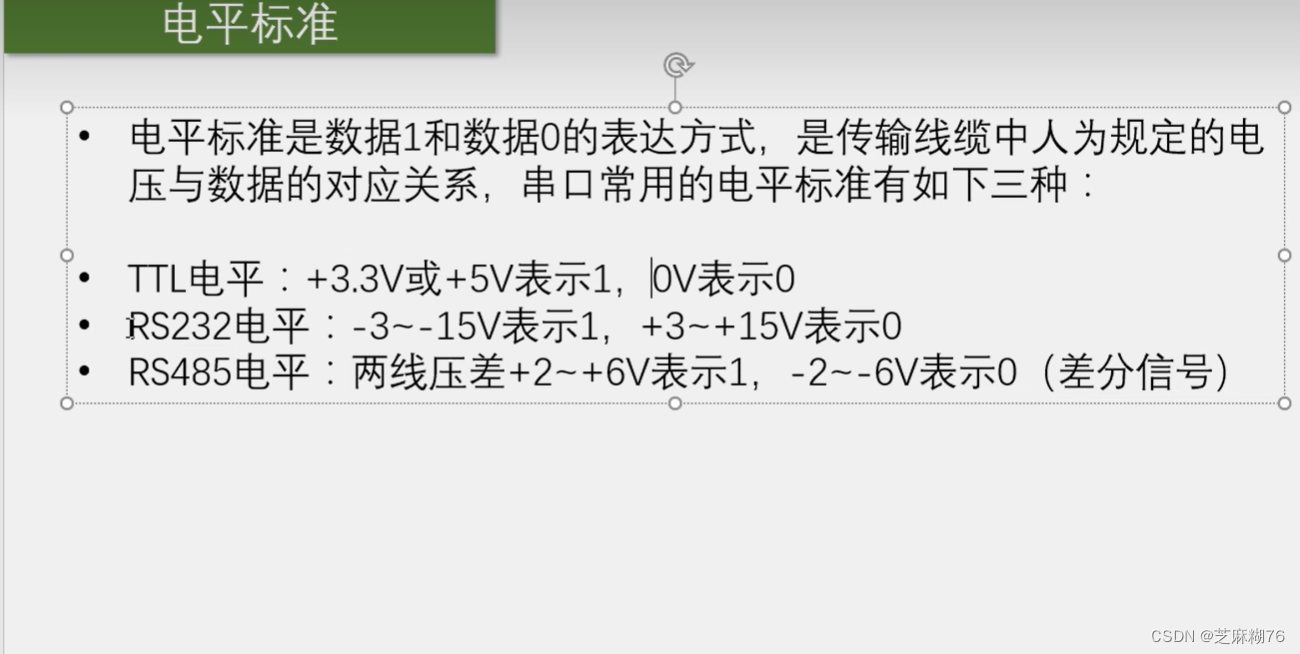
·TTL和RS232通信距离只有几十米
·RS485电平通信距离可达上千米
应用场景:
·TTL用于单片机这种低压小型设备
·RS232一般在大型机器上使用,由于环境比较恶劣静电干扰比较大,所以电压电平比较大,允许的波动范围也比较大
·RS485是两线压差,也就是差分信号,抗干扰能力较强
串口参数及时序
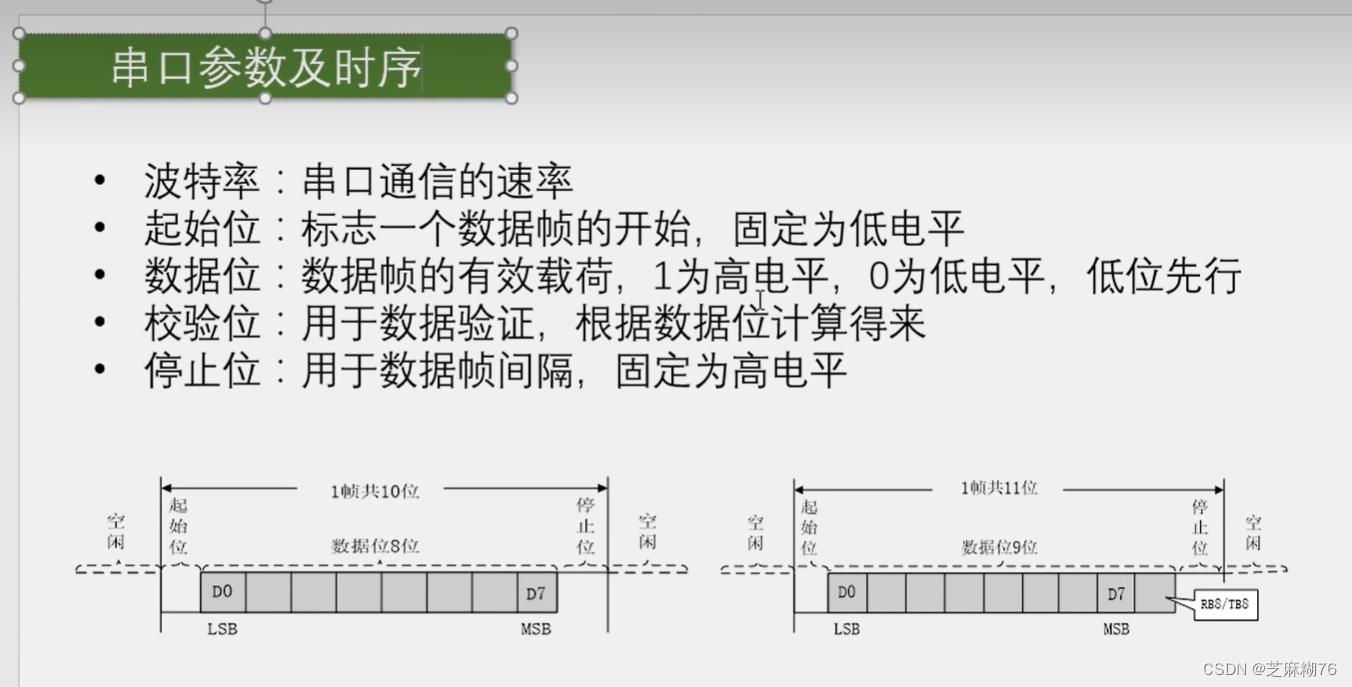
串口中,每一个数据都装载在一个数据帧里面,每个数据帧都由 起始位 数据位 和 停止位组成,左边的图数据位有八个,代表一个字节的八位,在右边的图中还可以在最后一位加上一位奇偶校验位,数据位总共就变成了9位。其中有效载荷位是前八位,代表一个字节,校验位跟在有效载荷位后面。
波特率:
用途:规定串口通信的速率。串口一般是使用异步通信,所以需要双方约定一个通信的速率。比如发送方每隔一秒发送一位,那接收方就得每个一秒接收一位,如果波特率是1000,那么一秒就发送1000位,每一位发送的间隔时间为1ms。如果接收快了就会重复接收某些位,接收慢了就会漏掉某些位。波特率是每秒传输码元的个数,单位是码元/s,或者直接叫波特(Baud),另外还有个速率表示叫比特率,意思是每秒传输的比特数,单位是bit/s,或者叫bps。在二进制调制的情况下,一个码元就是一个bit,此时波特率就等于比特率。单片机串口的通信基本都是比特率调制,高电平表示1,低电平表示0,一位就是1bit。串口的波特率经常会和比特率混用,因为这两个说法的数值相等。注意如果是多进制调制,那么波特率和比特率就不一样。
起始位:
标志一个数据帧的开始,固定位低电平。串口的空闲状态是高电平,也就是没有数据传输的时候,引脚必须置高电平。要开始传输的时候必须先发送一个起始位,这个起始位必须是低电平来打破空闲时候的高电平,产生一个下降沿。这个下降沿将会告诉接收设备,这一帧数据要开始了。如果没有起始位的话,发送八个1,那么数据线一直是高电平,没有任何数据波动,接收方无法判断是否发送了数据。所以一定要有一个固定为低电平的起始位。
数据位:
比如发送一个字节是0x0f,先转化为二进制 0000 1111 ,地位先行,所以数据要从地位开始发送,也就是将1111 0000依次放在引脚上。可以按波特率要求,定时翻转电平,产生相应的波形便可以发送该数据。
校验位:
这里串口使用的是一种叫做奇偶校验的验证方法,用来判断数据传输是否出错。如果数据出错了可以选择丢弃或者要求重传。校验可以选择三种方式,分别是:无校验、奇校验和偶校验。
无校验:
无校验就是不需要校验位,波形就是左边的图(串口参数及时序下方的图),包含有起始位、数据位和停止位三个部分。
奇偶校验:
奇校验和偶校验的波形是右边的图(串口参数及时序下方的图),包含起始位、数据位、校验位和停止位四个部分。
奇校验:
如果使用了奇校验,那么包括校验位在内的9位数据会出现奇数个1,比如传输的是
0000 1111,目前总共是4个1,是偶数个,那么校验位就需要再补一个1,连同校验位一共就是0000 1111 1 一共五个1,保障1为奇数。如果数据是0000 1110一共三个1是奇数个,那么校验位就补一个0,连同校验位一共就是0000 1110 0,总共还是3个1。发送方在发送数据后会补一个校验位,保证1的个数为奇数。接收方在接收数据后会验证数据位和校验位,如果1的个数还是奇数,那就认为数据没有出错。如果在传输过程中,因为干扰有一位由1变为0,或者由0变成1,那么整个数据的奇偶特性就会发生变化,接收方一验证,发现1的个数不是奇数,那就认为传输出错,可以选择丢弃或者重传。
偶校验:
保证1 的个数是偶数,校验方法同理奇校验。
缺点:
当两位数据同时出错时,奇偶特性不变时,那就校验不出,奇偶校验只能保证一定程度上的校验。如果要求更高的检出率,可以使用CRC校验,好用但是复杂
停止位:
同理,在一个字节数据发送完成之后必须要有一个停止位。这个停止位的左右是,用于数据帧的间隔,固定为高电平。同时这个停止位也是为了下一个起始位做准备。如果没有起始位,当数据的最后一位是0的时候,下次再发送一帧的时候就没办法产生下降沿。如果没有数据了,引脚也恰好为高电平。那么代表引脚处于空闲状态。
串口时序:
示波器捕捉波形操作方法:
将探头的GND接在负极,探头接在发送设备的TX引脚。在发送数据时就可以捕捉到这些波形。
(1)发送0x55:
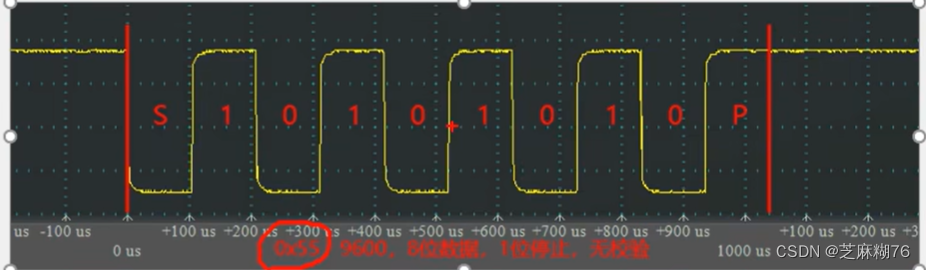
这是发送0x55时TX引脚发送数据时输出的波形。波特率是9600,所以每一位的时间就是1/9600,大概就是104us,如上图所示,比100us略多一点。没发送数据的时候是空闲时态,发送数据的时候数据帧先发送起始位,产生下降沿代表数据帧开始,数据0x55转为2进制,低位先行,发送1010 1010,八位数据,一位停止,无校验位,之后便是停止位(图中的P处),把引脚置回高电平,这样一个数据帧就完成了。
在stm32中,根据字节数据翻转高低电平是由USART外设自动完成。也可以手动完成,定时器定一个104us的时间,时间到之后,按照数据帧的要求调用GPIO_WriteBit置高低电平,产生一模一样的波形,也是可以完成串口通信的。TX引脚发送就是置高低电平,显然RX引脚就是读高低电平,定时调用GPIO_ReadInputDataBit读取每一位去拼接成一个字节。当然,接收的时候还需要一个外部中断,在起始位的下降沿触发,进入接收状态,并且对齐采样时钟,然后依次采样八次,这就是接收的逻辑。
(2)发送0XAA:
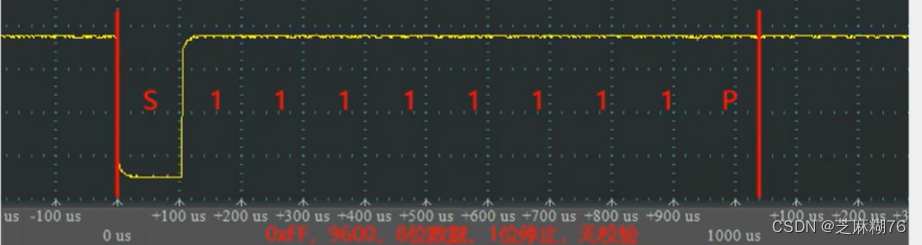 在起始位下降沿之后的一个数据帧的时间内,图中的高电平都是作为数据1来看的。当数据帧结束之后(大概在图中P的位置),虽然还是1没有变化,但是已经处于空闲状态,需要等待下一个下降沿来开启新的一帧数据。
在起始位下降沿之后的一个数据帧的时间内,图中的高电平都是作为数据1来看的。当数据帧结束之后(大概在图中P的位置),虽然还是1没有变化,但是已经处于空闲状态,需要等待下一个下降沿来开启新的一帧数据。
(3)波特率更改为一半:
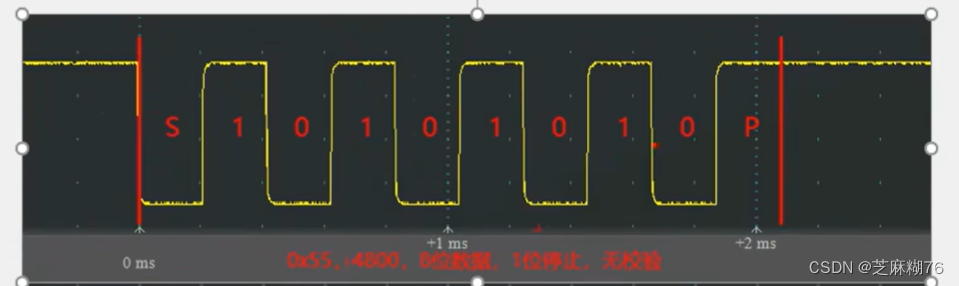
将波特率改为4800,与前面9600相比,变成了一半而已,那相应的波形时长就会变回原来的二倍,每一位的间隔也大概为208us,也就是之前的两倍。虽然波形的时间拉宽,但是波形的趋势是不变的
(4)增加奇偶校验位:
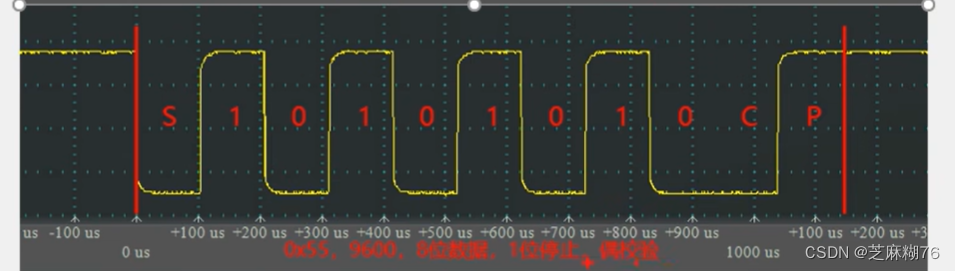 增加了偶校验位,数据还是0x55,1的个数是4个,已经是偶数了,所以如图输出校验位C是低电平0,此时包括数据校验位在内的数据总共是偶数个1
增加了偶校验位,数据还是0x55,1的个数是4个,已经是偶数了,所以如图输出校验位C是低电平0,此时包括数据校验位在内的数据总共是偶数个1
(5)停止位:
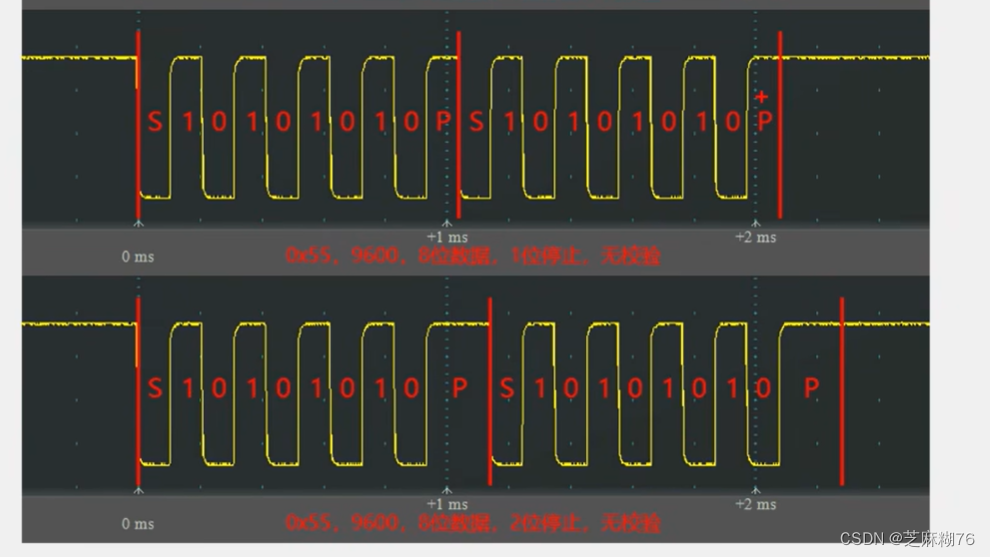 串口的停止位是可以进行配置的,可以选择1位、1.5位、2位等,上面的波形是1为停止位,连续发送两次0x55,两个数据帧会连接在一起,中间没有空闲状态。下面的是2位停止位,连续发送两个0x55,如图可见,停止位就是两位的宽度,中间也没有空闲状态,不过数据的分隔将会更宽。
串口的停止位是可以进行配置的,可以选择1位、1.5位、2位等,上面的波形是1为停止位,连续发送两次0x55,两个数据帧会连接在一起,中间没有空闲状态。下面的是2位停止位,连续发送两个0x55,如图可见,停止位就是两位的宽度,中间也没有空闲状态,不过数据的分隔将会更宽。
STM32的USART外设:
·USART,Synchronous是同步的意思,另外还有个串口叫UART,少了个S,就是异步发射器。一般串口很少使用这个功能,所以使用起来USART和UART没有什么区别。对于stm32来说USART只是比UART多了个时钟而已,但是只支持时钟输出不支持时钟输入,这个模式更多的是为了兼容别的协议或特殊用途使用的,并不支持两个USART之间进行同步通信,也就是说学习串口仅是使用异步通信,即USART和UART没区别。
·这个波特率发生器就是用来配置波特率的,本质上就是一个分频器,比如给APB2总线给个72MHz,然后波特率发生器进行一个分频,得到我们想要的波特率时钟,最后在这个时钟下进行收发,就是我们指定的通信波特率。
·可配置数据位长度8或9,这里的参数就是我们前面“串口参数与时序”中的图,是包含奇偶校验位的长度,一般不需要校验位就选8位,需要校验位就选9位。停止位长度支持多种停止位,也就是在”串口时序“这个图中,进行连续发送时,停止位长度决定了帧的间隔。常用1位的停止位,其他的较为少用。
·硬件流控制:比如A设备有个TX向B设备的RX发送数据,A设备一直在发,发的太快了,B设备处理不过来,如果没有硬件流控制,那B设备只能抛弃新数据或覆盖原数据。如果有硬件流的话,在硬件电路上就会多出一根线,如果B没准备好接收就置高电平,如果准备好了就置低电平,A接收到了B反馈的信号,就只会在B准备好的时候才会发送数据,如果B没准备好那么数据就不会发送出去。硬件流控制可以较好的防止设备B因处理慢而导致数据丢失的问题。
·DMA:如果有大量的数据进行收发,可以使用DMA转运数据,减轻CPU的负担
·USART1是APB2总线上的设备,USART2和USART3都是APB1总线上的设备,开启时钟的时候需要注意,使用的时候挂载哪个总线影响并不是很大。
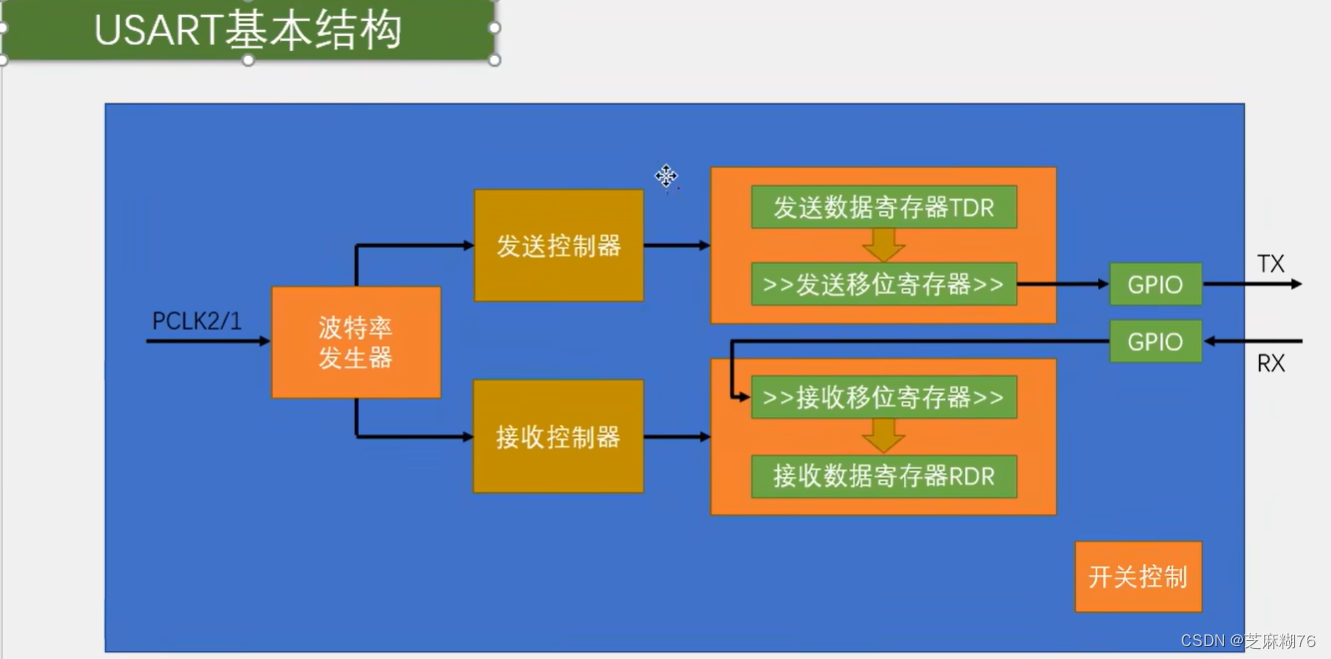
USART框图
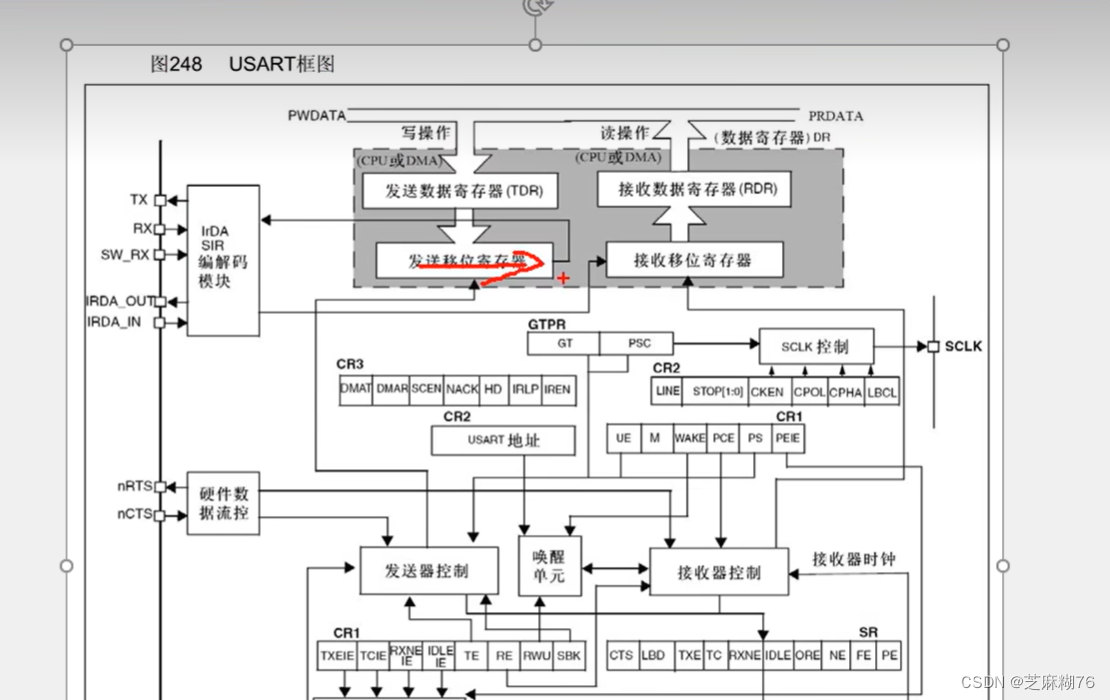
串口数据寄存器:
右上角这一块,是串口的数据寄存器,发送或接收的字节数据就寄存在这个地方。这里有两个寄存器,一个数TDR(Transmit DR)发送数据寄存器,另一个是RDR(Receive)接收数据寄存器。这两个寄存器占用同一个地址,在程序上只表现为一个寄存器,就是数据寄存器DR(Data Register),但是在实际硬件中分成了两个寄存器。其中TDR是只写的,RDR是只读的。当进行写操作时,数据就写入了TDR,当进行读操作时,数据就从RDR读出来。
数据移位寄存器:
数据寄存器下边是两个移位寄存器
发送移位寄存器:
作用:把一个字节的数据一位一位的移出去,正好对应串口协议波形的数据位。关于移位寄存器的工作状态,举个例子,比如某时刻给TDR写入了0x55,,在寄存器里就是二进制存储0101 0101,此时硬件检测到你写入数据了,他就会检查当前移位寄存器是否有数据在进行移位,如果没有则0101 0101会立刻移动到移位寄存器准备发送。当数据从TDR移动到移位寄存器时,会置一个标志位叫TXE(TX Empty),发送寄存器空。检查标志位如果置1了就可以在TDR写入下一个数据了。但TXE置1时其实数据还没有发送出去,只要数据从TDR移动到发送寄存器了,TXE就会置1,我们就可以写入新数据。下一步发送移位寄存器就会在发送器控制的驱动下向右移位,按箭头方向向右一位一位把数据移动到TX引脚,此处也和串口协议规定的低位先行是一致的。当数据移位完成之后,新的数据将会自动从TDR寄存器转移到发送移位寄存器中,如果当前移位寄存器移位还没有完成,TDR的数据就会进行等待,一旦移位完成,就会立即转移进发送移位寄存器。
优点:有了TDR和移位寄存器的双重缓存,可以保证发送数据的时候数据帧之间不会有空闲,提高了工作效率。
接收移位寄存器:
作用:数据从RX引脚通向接收移位寄存器,在接收器控制的驱动下,一位一位的读取RX的高低电平,按箭头先放在最高位,然后向右移,移位8次之后就可以接收一个字节了。因为串口协议定义低位先行,所以接收移位寄存器时从高位往低位这个方向移动的,当一个字节移位完成之后,这一个字节的数据就会整体地一下子移动到数据接收寄存器RDR里边去。在转移的过程中依然会置一个标志位RXNE(RX Not Empty),接收寄存器非空,如果发送设备发送过快,接收设备来不及处理,就会出现丢弃或覆盖数据的现象。有了流控就可以避免这个问题,流控的两个引脚nRTS和nCTS。
硬件数据流控:(了解即可,一般不用)
nRTS(Request To Send):是请求发送,是输出脚,也就是告诉别人我当前能不能接收
nCTS(Clear To Send):是清除发送,是输入脚,也就是用于接收别人nRTS的信号的,前面加个n就是低电平有效。
工作模式:
首先找一另一个支持流控的串口(B),B的 TX 接到stm32(A)的 RX ,然后A的RTX要输出一个能不能接收数据的反馈信号,接到B的CTS,当A能接受的时候,RTS就发置低电平请求对方发送,B的CTS接收到之后就可以一直发,当A处理不过来时,比如接收寄存器一直没有读,又有新数据过来了,代表A没有及时处理,那么RTS就会置高电平,B的CTS接收到就会暂停发送,直到A的数据被读走,RTS被置低电平,B才会继续发送。
反过来,当A用TX给B发送数据时,A的CTS就要接收到B的RTS,用于判断对方能不能接收。TX和CTS是一对的,RX和RTS是一对的。CTS和RTS要交叉连接
时钟功能:(了解即可,一般不用)
在图的最右边SCLK,用于产生同步的时钟信号,用于配合发送移位寄存器进行输出,发送移位寄存器每移位一次,同步时钟电平就跳变一个周期。也就是说,有了时钟兼容的输出串口就可以兼容SPI,另外这个时钟也可以做自适应波特率,比如接收设备不确定发送设备给的是什么波特率,便可以通过测量这个时钟的周期,计算得到波特率。
唤醒单元:(了解即可,一般不用)
作用:实现串口挂载多设备
串口一般是点对点的通信,一般只支持两个设备互相通信,想发数据的话直接发送就行。而多设备可以在一条总线上挂载多个从设备,每个设备分配一个地址,通信时先进行寻址确定通信对象,再进行数据收发。在 唤醒单元 上方有一个 USART地址 ,先给串口分配一个地址,当发送指定地址时,此设备唤醒开始工作。当发送别的设备地址时,别的设备唤醒开始工作。当设备没收到地址时就会保持沉默,以此来实现多设备的串口通信。
中断控制:
中断申请位就是右边状态寄存器里的各种标志位。TXE(发送寄存器空)和RXNE(接收寄存器非空)这两个是比较重要的标志位,这两个是用于判断发送状态和接收状态的必要标志位。中断控制就是控制中断能不能通向NVIC。
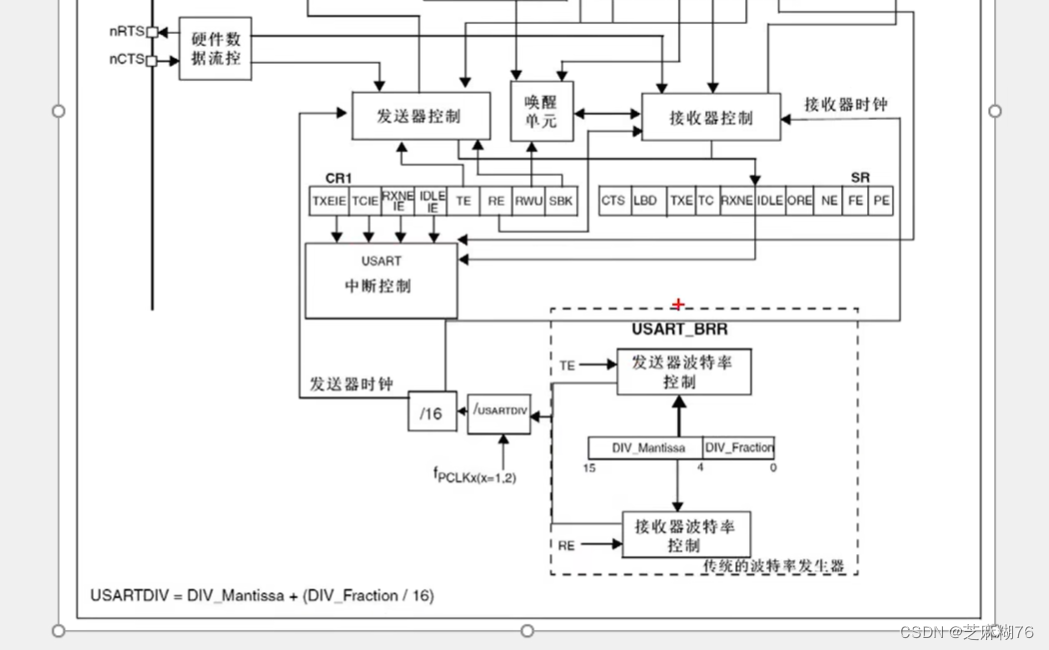
波特率发生器:
在图的最下面部分。波特率发生器其实就是分频器。APB时钟进行分频,得到发送和接收移位的时钟。时钟输入时 ,x = 1 或 2,USART挂载在APB2,一般是PCLK2的时钟72MHz。其他的USART都挂载在APB1,一般是PCLK1的时钟36MHz。之后时钟进行分频,除以一个USARTDIV的分频系数,这个系数包含了整数部分和小数部分。有些波特率用72M除以一个整数可能除不尽会有小数,带有误差,这里的分频系数支持小数点后4位,分频更加精准。分频完之后要除以16,得到发送器时钟和接收器时钟通向控制部分。
在这个板块右边的TE为1,就是发送器使能,发送部分的波特率就有效,如果是RE为1,那就是接收器使能,接收部分的波特率有效。
引脚功能复用表:
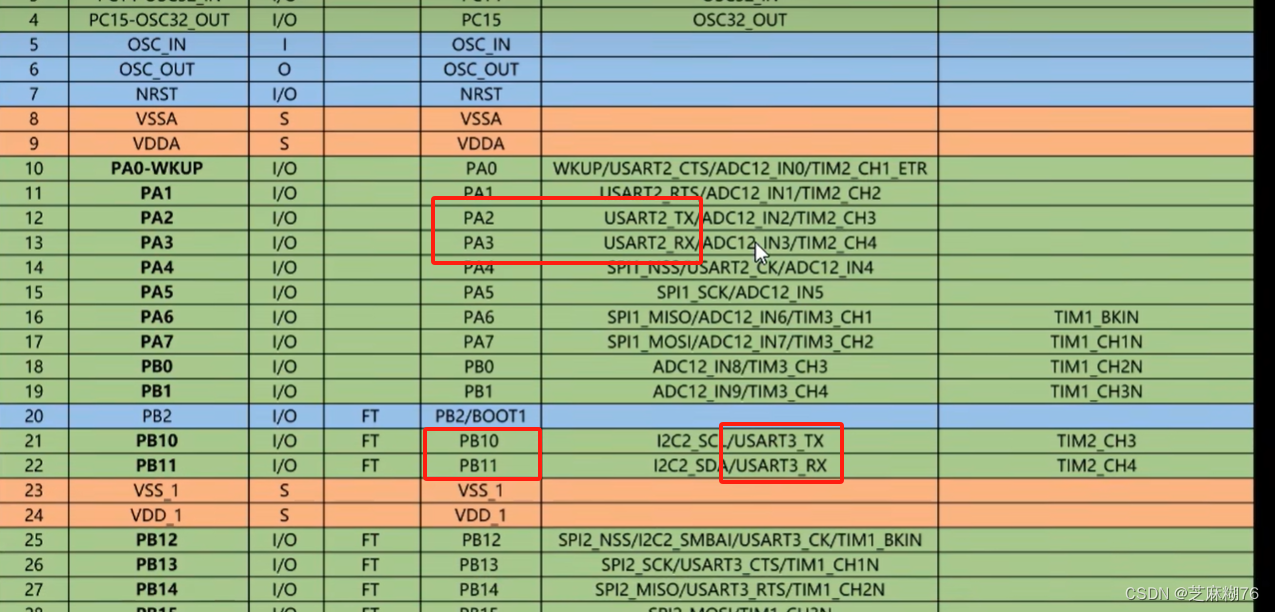

使用USART必须严格按照表里面的引脚来,对应哪一个不得修改

如这张图,有USART1的重映射,所以有机会换引脚,其他的引脚都没有办法作为USART的引脚。
USART基本结构:
数据帧:
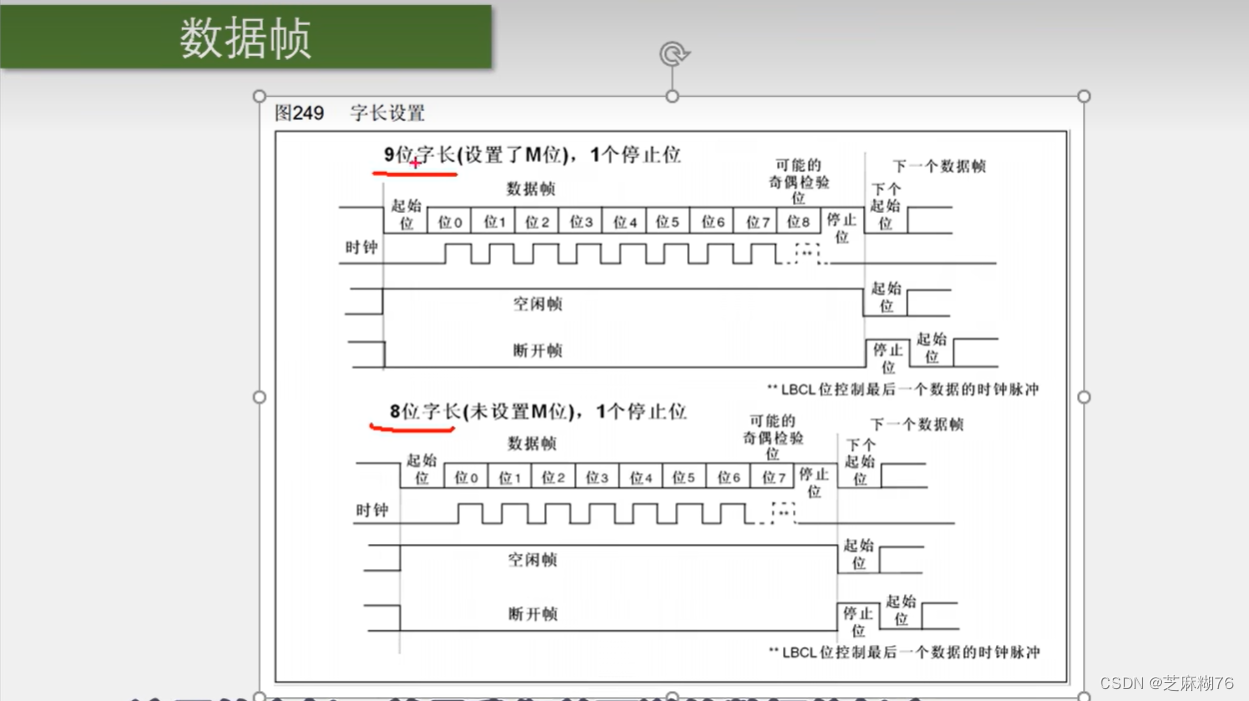 这个图是在程序中配置8位字长和9位字长的波形对比,这里的字长就是我们前面说过的数据位长度,包含校验位。
这个图是在程序中配置8位字长和9位字长的波形对比,这里的字长就是我们前面说过的数据位长度,包含校验位。
9位字长:
第一条时序明显是TX发送或RX接收的数据帧格式,空闲高电平,起始位低电平,然后根据写入的数据置0或1,依次发送位0至位8,共计9位,最后停止位置1,数据帧结束。其中位8是可能的校验位,通过配置寄存器可配置成奇校验、偶校验或无校验位。这里可配置成八位有效载荷+一位校验位或者9位有效载荷位。一般选择9位字长都是加上校验位的,因为8位有效载荷刚好对应一个字节。
第二条时序就是前面提及的同步时钟输出功能。在每个数据位之间都有一个时钟的上升沿。时钟的频率和数据速率都是一样的,接收端可以在时钟上升沿进行采样,以便于精准定位每一位数据。时钟的最后一位(图中的虚线部分),可以通过LBCL位控制是否要输出,时钟的极性和相位也可以通过配置寄存器进行配置。
空闲帧:从头到尾都是1
断开帧:从头到尾都是0
这两个数据帧通常用于局域网协议,串口用不着,了解即可
8位字长的:
从位0一直到位7,共八位,比上边的少位八。同样最后一个位7也可能是校验位,同样如果选择了八位字长最好选择无校验,否则有效载荷位只剩7位。下面的时钟部分同上。
数据帧停止位:
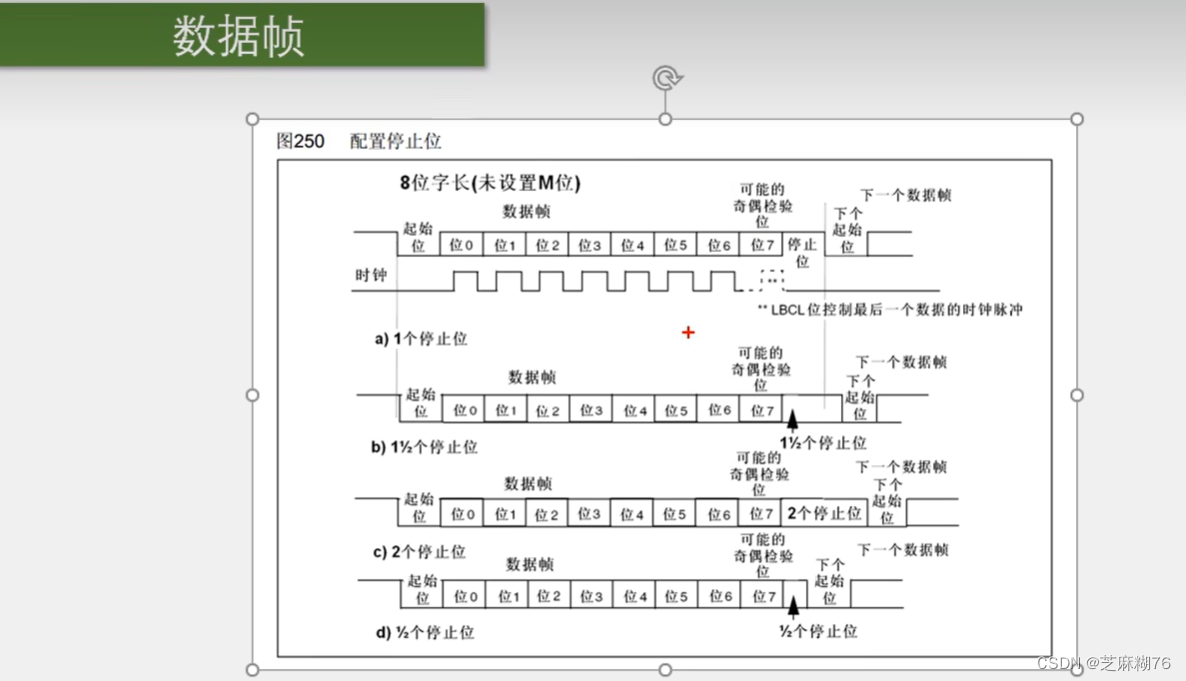
可配置为0.5、1、1.5、2共四种,这四种参数的区别就是停止位的长度不一样,第一行是一个停止位,停止位的时长和数据位一位的时长一样,第二行是1.5个停止位,此时停止位就是数据位时长的1.5倍,同理两个停止位就是时长的2倍,0.5倍同上。停止位就是用于控制停止时长的。一般使用1位停止位
起始位侦测:(细节)
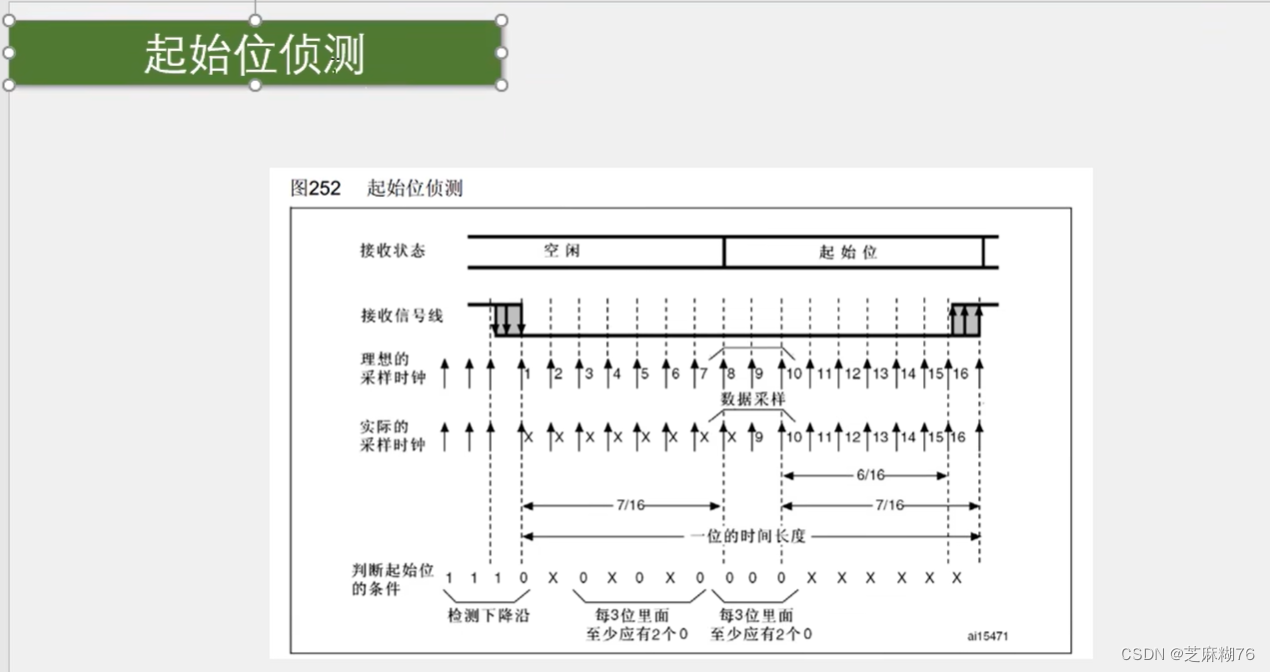
TX定时翻转电平即可,输入较为麻烦,不仅需要保证采样频率和波特率一致,还要保证每次输入采样的位置正好处在每一位的正中间。只有在正中间采样读进来的数据才是最可靠的。如果采样点过于靠前或靠后,可能高低电平正在翻转,电平不稳定,稍有误差就采样错误。另外输入最好对噪声有一定的判断能力,如果是噪声最好置一个标志位进行提醒。
当输入电路侦测到一个数据帧的起始位之后,就会以波特率的频率,连续采样一帧数据。从起始位开始,采集位就要对其位的正中间,只要第一位对其后边必定对齐。在输入部分对采样时钟进行了细分,将会以波特率的16倍进行采样,换句话说就是在一位的时间里进行16次采样。最开始空闲状态置高电平,那采样就一直是1,在某个位置突然采样到0,说明在两次采样之间出现了一次下降沿,如果没有任何噪声,那之后就应该是起始位。在起始位会进行连续16次采样,没有噪声的话16次采样必定都是0,但是实际电路必定有噪声,所以即使出现了下降沿仍需多采样几次以防万一。该电路会在下降沿的第3、5、7次进行一批采样,在8、9、10再进行一批采样,这两批采样中都要求每三位里面至少要有2个0,如果没有噪声那么全是0满足情况,如果有轻微噪声,导致里面2位是0一位是1,哪页算是监测到了起始位,但在状态标志位里会置一个标志位NE(noise error)噪声标志位,作用是提醒数据收到了但是有噪声,谨慎使用。如果三位里只检测到1个0那就不算检测到起始位,可能前面的下降沿是噪声导致的,电路就会忽略前面的数据重新开始捕捉下降沿。如果通过了起始位侦测,那么状态就会由空闲变为接收起始位,同时第8、9、10次的采样位置正好是起始位的正中间,之后的数据位接收都将会在第8、9、10位进行采样,用于保证采样都在位的正中间,这就是起始位侦测和采样位置对其的策略。
数据采样的流程:
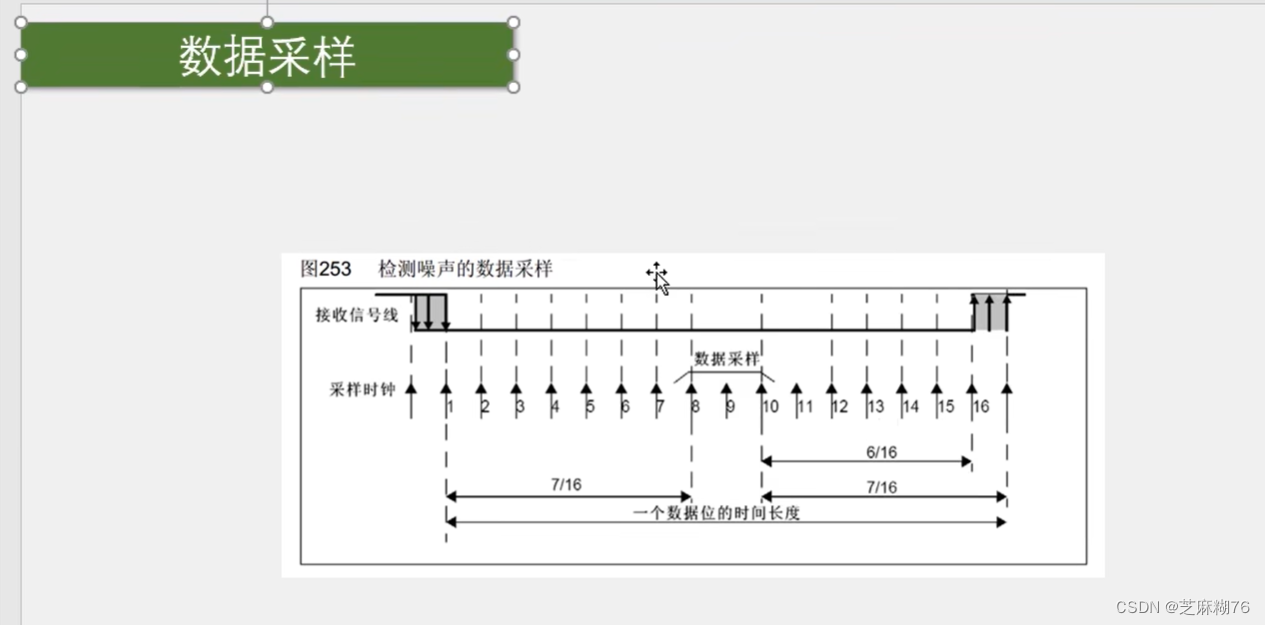
从1-16是一个数据位的时间长度,在一个数据位有16个采样时钟,由于起始位侦测已经对齐了采样时钟,所以将会直接在第8、9、10位进行采样,为了保证数据的可靠性,将会连续采样3次,没有噪声的情况下全为1或全为0,全为1就认为收到了1,全为0同理。如果有噪声导致三次采样不全为1或0,那就按照2:1的规则进行,两次为1就认为收到1,0同理。在这种情况下NE也会置1
波特率发生器:
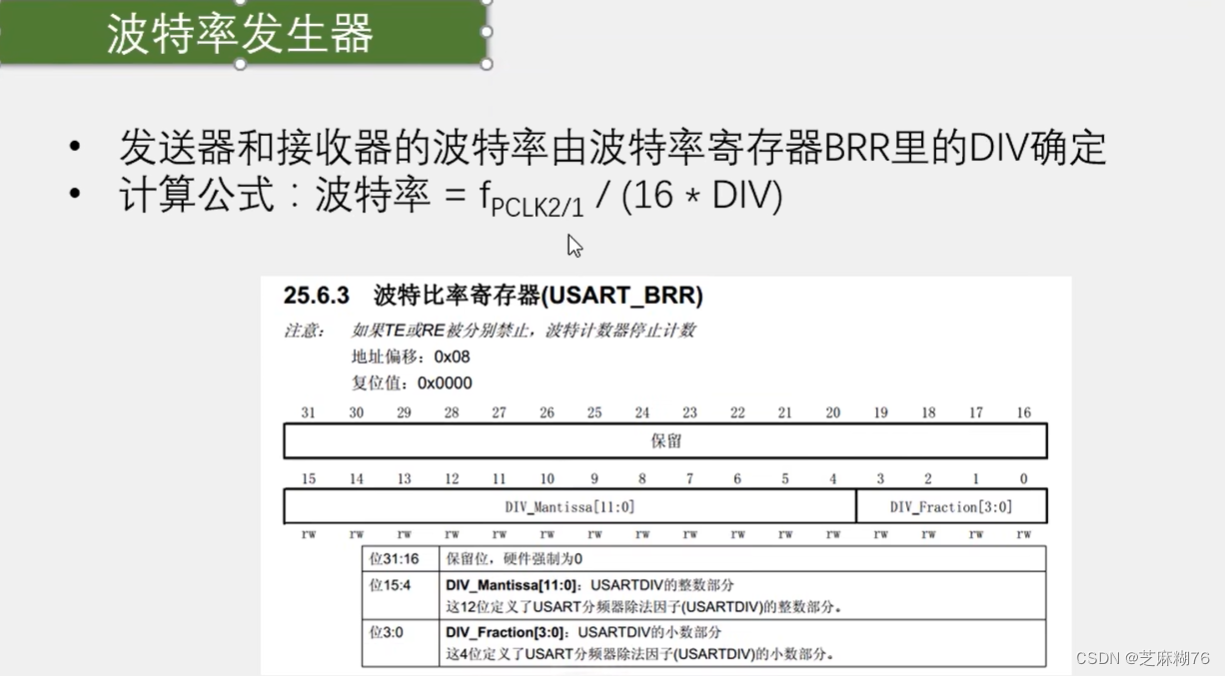
波特率发生器就是分频器,发生器和接收器的波特率由波特率寄存器BRR里面的DIV确定,DIV分为整数部分和小数部分,可以实现更细腻的分频。波特率 = f_pclk1(或2) / (16 * DIV),这里的16是因为内部还有个16倍波特率的采样时钟,所以这里的 输入时钟 除以 DIV 会等于16倍的波特率。举个例子,要配置USART1为9600的波特率,带入公式为: 9600 = 72 000 000 /(16 * DIV),所以DIV = 468.75,转化成2进制就是 11101 0100.11,写到寄存器中前后剩下的部分补0,就是0001 1101 0100.1100。如果用库函数配置的话直接写即可,库函数会自动帮我们计算。
















 4314
4314











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









