






单片机串口通讯有着许多通讯方式,例如R485/RS232/RS422/TTL/网口等等,在现实生活中RS485通讯是使用频率最高的一种通讯方式,因为485通讯是采用一对多的通讯方法,何为一对多,即一个主机若干个从机,一个负责发数据,其他负者数据的接收;那么那么多数据接收设备不会导致数据混乱吗?答案是肯定会的,在这时就需要用到通讯协议了。
通讯协议一般分为帧头、地址、数据包、帧尾组成;其中帧头一般是2byte,地址1byte,数据包看自己需要自定义字节大小,帧尾1byte;其中帧头是判断整体设备通讯接收数据的正确性,地址是用来区分接收设备的判断,帧尾一般是数据包的校验和,这样帧尾是随着数据的变化而变化,通讯失准确性更加精准。
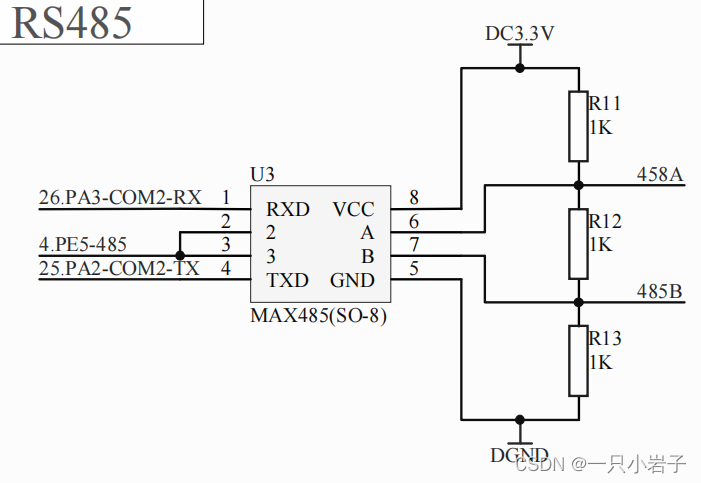
以上为硬件MAX485通讯芯片连接定义,在本篇当中RXD、TXD我们使用C8T6当中的串口1进行配置(PA9、PA10),其中数据发送时需要把2、3脚拉高,接收数据时需置低;其中PA9需复用推挽输出,PA10浮空输入;
** 1脚和4脚(RO\DI)端分别为接收器的输出和驱动器的输入端
**2脚和3脚(RE/DE)端分别为接收和发送的使能端
** A端和B端分别为接收和发送的差分信号端。
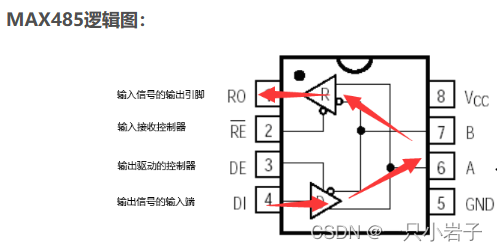
MAX485芯片的结构和引脚都非常简单,内部含有一个驱动器和接收器。RO和DI端分别为接收器的输出和驱动器的输入端,与单片机连接时只需分别与单片机的RXD和TXD相连即可。RE和DE端分别为接收和发送的使能端,当/RE为逻辑0时,器件处于接收状态;当DE为逻辑1时,器件处于发送状态,因为MAX485工作在半双工状态,所以只需用单片机的一个管脚控制这两个引脚即可。其最主要工作原理就是将RS485信号转成单片机的TTL信号。
以下为485通讯.c文件
#include "stm32f10x.h" // Device header
#include <stdio.h>
#include "Delay.h"
#include <stdarg.h>
#include <Serial.h>
uint8_t Serial_RxPacket[8]; //8个字节
uint8_t Serial_RxFlag; //发送完成的标识符
void Serial_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //使能GPIOA
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE); //使能USART1时钟
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11; //控制数据的接收、发送
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //485-TX
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空输入
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; //485-RX
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
USART_InitStructure.USART_BaudRate = 9600;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//8位
USART_InitStructure.USART_StopBits = USART_StopBits_1;//停止位1
USART_InitStructure.USART_Parity = USART_Parity_No ;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;//模式:接收/发送
USART_Init(USART1, &USART_InitStructure); //初始化USART1
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE); //接收中断使能
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; //分优先级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_Init(&NVIC_InitStructure);
USART_Cmd(USART1, ENABLE);
RS485_receive(); //默认打开接收机
}
void Serial_SendByte(uint8_t Byte) //发送单个字节
{
RS485_send(); //开启发送模式,关闭接收模式
USART_SendData(USART1, Byte);
while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
Delay_ms(2);
RS485_receive(); //默认打开接收机
}
void Serial_SendArray(uint8_t *Array, uint16_t Length) //发送数组式字节
{
uint16_t i;
for (i = 0; i < Length; i ++)
{
Serial_SendByte(Array[i]);
}
}
uint8_t Serial_GetRxFlag(void)
{
if (Serial_RxFlag == 1)
{
Serial_RxFlag = 0; //开始标识
return 1;
}
return 0;
}
uint8_t Sum_Check(uint8_t *buf, uint16_t len)
{
uint16_t i = 0;
uint8_t sum_temp = 0;
for (i = 0; i < len; i++)
{
sum_temp += buf[i];
}
return sum_temp;
}
void USART1_IRQHandler(void)
{
static uint8_t RxState = 0;
static uint8_t pRxPacket = 0;
if (USART_GetITStatus(USART1, USART_IT_RXNE) == SET) //接收数据
{
uint8_t RxData = USART_ReceiveData(USART1); //回传数据赋给RxData
if (RxState == 0)
{
if (RxData == 0xFF) //帧头判断
{
RxState = 1; //帧头无误标志位
pRxPacket = 0;
}
}
else if (RxState == 1)
{
Serial_RxPacket[pRxPacket] = RxData; //RxData分别赋给Serial_RxPacket[0]*Serial_RxPacket[3]
pRxPacket ++;
if (pRxPacket >= 6)
{
RxState = 2; //数据接收完毕标志位
}
}
else if (RxState == 2)
{
uint8_t sum;
sum = Sum_Check((u8*)Serial_RxPacket,6);
if (RxData == sum) //校验和验证
{
Serial_RxFlag = 1; //结束标识
Serial_SendArray(Serial_RxPacket,6);
}
if (RxData != sum) Serial_SendByte(0x00); //发送校验不通过字节
pRxPacket = 0; RxState = 0; //pRxPacket、RxState重新赋值方便下次接收数据
}
USART_ClearITPendingBit(USART1, USART_IT_RXNE);
}
}.h文件
#ifndef __SERIAL_H
#define __SERIAL_H
#include "stm32f10x.h"
#define RS485_send() GPIO_SetBits(GPIOA,GPIO_Pin_11); //发送使能
#define RS485_receive() GPIO_ResetBits(GPIOA,GPIO_Pin_11); //接收使能
extern uint8_t Serial_RxPacket[]; //extern 数组 方便数据调用
void Serial_Init(void);
void Serial_SendByte(uint8_t Byte);
void Serial_SendArray(uint8_t *Array, uint16_t Length);
void USART2_IRQHandler(void);
#endifmain函数
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h" //可以打印出来数据
#include "Serial.h"
#include "Key.h" //可以通过按键来发射数据
uint8_t KeyNum;
int main(void)
{
OLED_Init();
Key_Init();
Serial_Init(); //串口初始化
Serial_SendByte(0XAA); //上电初始化发送AA 表示设备通讯正常
while (1)
{
KeyNum = Key_GetNum();
}
}
以上为通讯全部代码,代码经过博主验证,通讯正常无异;
下图为数据测试截图,测试在100ms/次的发送频率下用通讯全部正常,无异常;
程序设计:
1.帧头正确校验码不对接收数据0x00;
2..帧头不对无回应;
3.帧头正确校验码正确回应接收数据;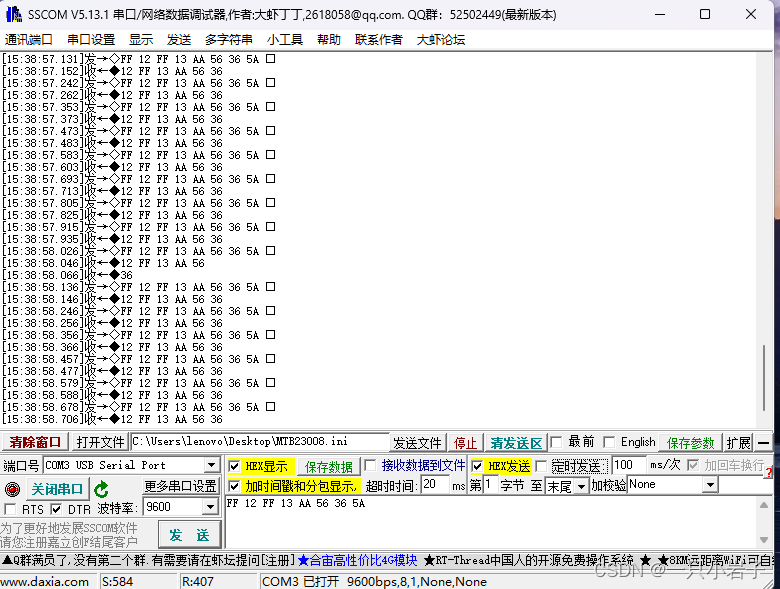
如要源码程序包可私信博主

















 2392
2392

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









