









 本文详细介绍了如何在RT-Thread操作系统上移植和配置蓝牙功能,包括在Ubuntu平台上使用QEMU模拟蓝牙,配置NimBLE软件包,以及通过btproxy和串口方式实现蓝牙通信。此外,还提到了在ArtPi硬件平台下与AP6212蓝牙的集成方法。
本文详细介绍了如何在RT-Thread操作系统上移植和配置蓝牙功能,包括在Ubuntu平台上使用QEMU模拟蓝牙,配置NimBLE软件包,以及通过btproxy和串口方式实现蓝牙通信。此外,还提到了在ArtPi硬件平台下与AP6212蓝牙的集成方法。
rtthread移植平台说明
rtthread_uart
rtthread平台下通用uart接口实现。
Ubuntu平台下利用qemu实现蓝牙功能
搭建 RT-Thread QEMU 环境
参考 文档:在 Ubuntu 平台开发 RT-Thread 完成 RT-Thread qemu 环境的搭建。目前我们使用qemu-vexpress-a9的bsp环境。
配置 NimBLE 软件包
1、在 qemu-vexpress-a9 BSP 根目录输入:
scons --menuconfig
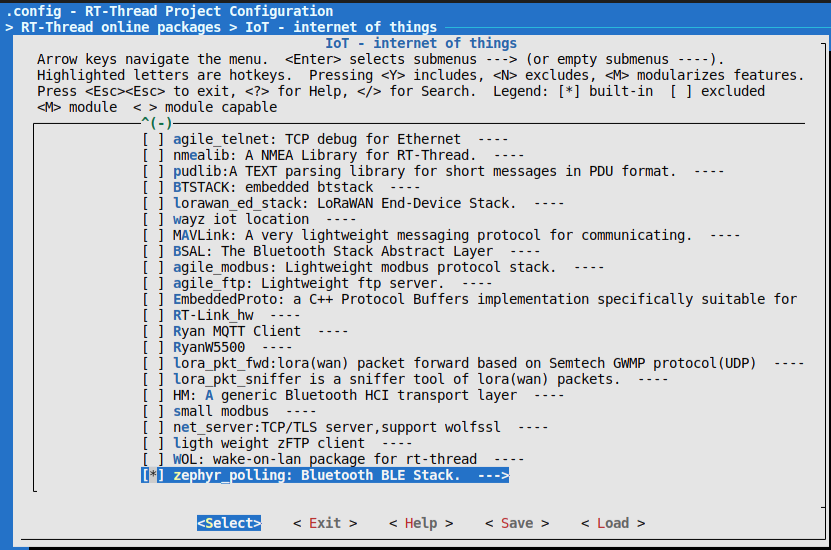
2、进入 RT-Thread online packages → IoT - internet of things 目录即可看到 zephyr_polling软件包,勾选软件包。
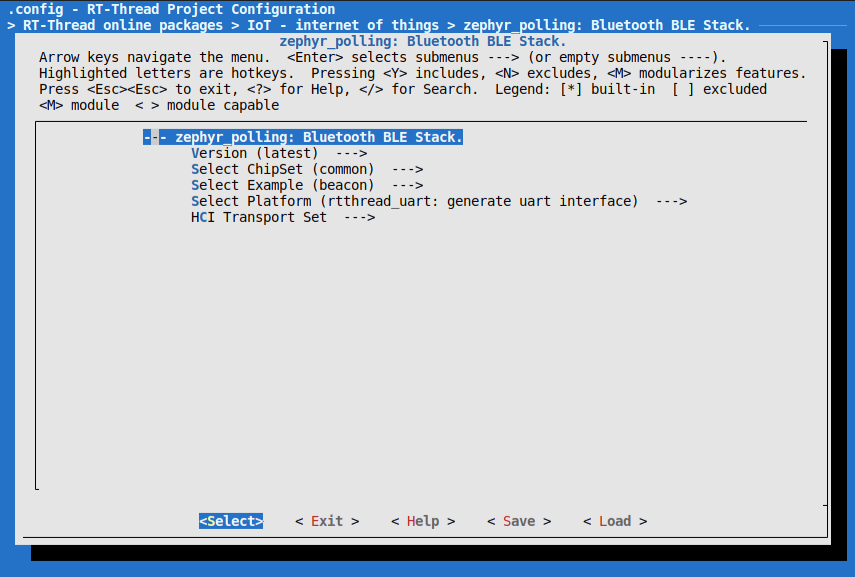
3、配置 zephyr_polling项目的参数,如下述配置chipset选common,example选beacon,platform选rtthread_uart。
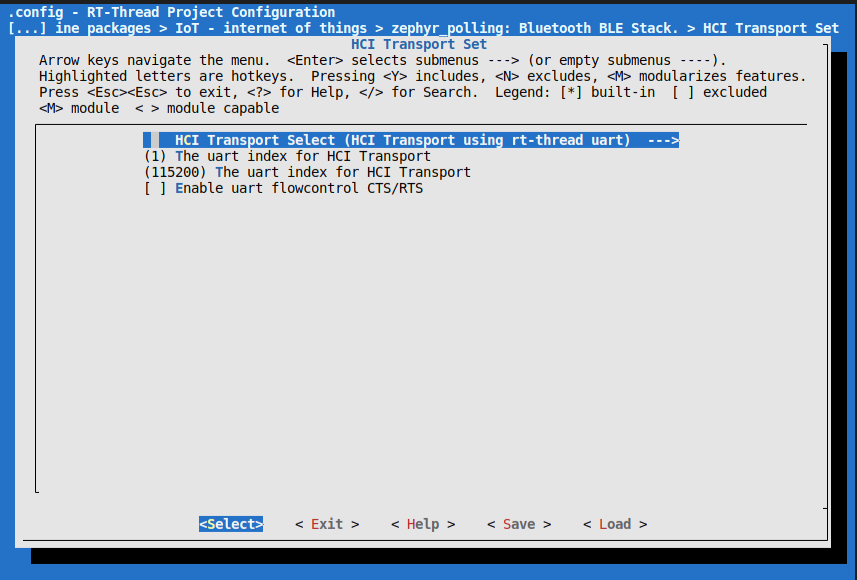
4、选择HCI接口参数
这里 The uart for HCI Transport 默认输入 “uart1” 就好
保存后退出。
下载软件包
使用 scons --menuconfig 命令后会安装及初始化 Env 工具,并在 home 目录下面生成 “.env” 文件夹,此文件夹为隐藏文件夹,切换到 home 目录,使用 ls 命令可查看所有目录和文件。
$ ls ~/.env
env.sh local_pkgs packages tools
运行 env.sh 会配置好环境变量,让我们可以使用 pkgs 命令来更新软件包,执行
$ source ~/.env/env.sh
使用 pkgs --update 命令下载 NimBLE 软件包到 BSP 目录下的 packages 文件夹里。
$ pkgs --update
btproxy方式
本节是参考:QEMU BLE (rt-thread.org)。
如果你手头有一个USB蓝牙dongle。只要Ubuntu能识别的都可以使用。
环境介绍
本次搭建环境所使用的资源和版本为:
- Ubuntu 18.04
- Bluez - v5.55
- ell - v0.35
- qemu - v2.11.1
- RT-Thread - v5.0.0
- 一个蓝牙适配器
环境搭建
环境搭建主要分为两部分,
- bluez 的编译
- Ubuntu里 RT-Thread QEMU 环境的搭建
首先需要更新源:
sudo apt update
sudo apt upgrade
安装所需要的依赖:
sudo apt install git automake libtool libelf-dev elfutils libdw-dev libjson-c-dev libical-dev libreadline-dev libglib2.0-dev libdbus-1-dev libudev-dev libncurses5-dev python3 python3-pip qemu
bluez 编译安装
bluez 里有许多实用的工具,例如 btproxy,但是 Ubuntu 自带的 bluez 并未将这些工具都编译出来,因此需要我们重新编译 bluez。
在相同目录下克隆获取 0.35 版本的 ell,5.55 版本的 bluez 。
git clone -b 0.35 git://git.kernel.org/pub/scm/libs/ell/ell.git
git clone -b 5.55 https://github.com/bluez/bluez.git
最终 ell 和 bluez 应该在同一个目录级别下,目录结构为:
.
|--- ell
| |--- ell
| |--- unit
|--- bluez
| |--- src
| |--- tools
然后输入下述命令编译 bluez:
cd bluez
./bootstrap-configure --disable-android --disable-midi --disable-mesh
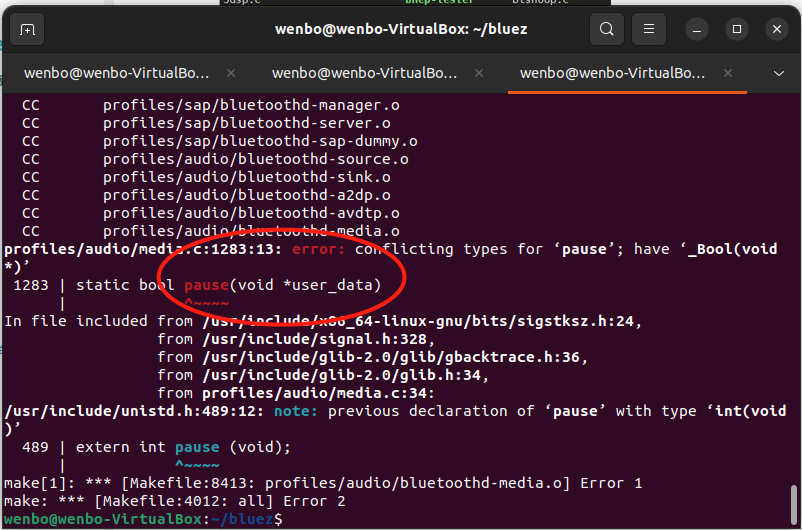
make
注意,这个时候会报错,但是不用管,tools目录下已经有所需的btproxy。
QEMU 运行 BLE
qemu 运行 BLE 时,本质上还是在和物理机的蓝牙设备通信,下面介绍如何在 qemu 环境中使用蓝牙设备。
首先输入 hciconfig 查看本机的蓝牙设备,
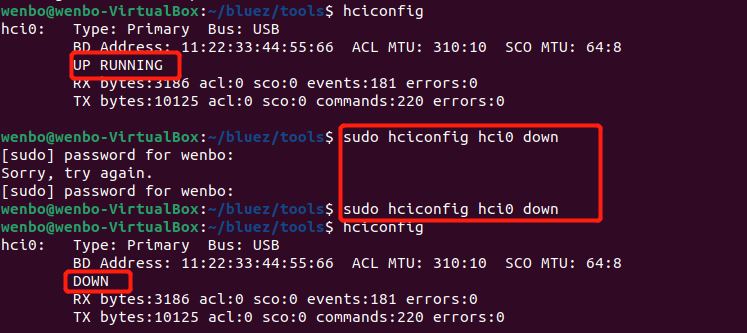
我这里是 hci0 蓝牙设备,需要保证上述红框框住的部分为 DOWN,也就是该蓝牙设备未打开,否则需要输入下述命令关闭该蓝牙设备:
sudo hciconfig hci0 down
然后进入 bluez 的 tools 目录,输入命令为该蓝牙设备创建一个代理(proxy)。
sudo ./btproxy -u -i 0
其中 -u 代表使用 Unix Server,默认路径为 /tmp/bt-server-bredr,-i 0 指使用 hci0 蓝牙设备,如果是 hci1 蓝牙设备,则需更改为 -i 1 。运行成功后会有下述显示:

然后在 RT-Thread 的 bsp/qemu-vexpress-a9 目录下编译运行:
scons
qemu-system-arm -M vexpress-a9 -kernel rtthread.bin -nographic -serial mon:stdio -serial unix:/tmp/bt-server-bredr
即可成功在 qemu 环境里与蓝牙卡片交互,下面稍微介绍下原理和注意事项。
qemu 命令参数里与串口相关的有 -serial mon:stdio -serial unix:/tmp/bt-server-bredr,-serial 参数的介绍为:
-serial dev redirect the serial port to char device ‘dev’
这个参数将 qemu 程序的串口重定向到物理机的设备文件,
第一个 -serial mon:stdio 将 qemu 里的 uart0 重定向到了物理机的 stdio 设备文件,而且在 qemu 程序里 uart0 用作 msh 命令行工具,类似 stdio,因此我们可以在物理机上看到 qemu 程序的打印数据,也可以输入命令。
第二个 -serial unix:/tmp/bt-server-bredr 是将 qemu 里的 uart1 重定向到物理机的 /tmp/bt-server-bredr 文件,而这个文件又是 hci0 设备的代理,因此从 qemu 程序的角度来看,就是使用 H4 协议,通过 uart1 去访问蓝牙设备。uart1 的波特率使用 115200 即可(未找到说明,但一般都是这样使用)。
注意:上述两个 -serial 的顺序不能颠倒,否则 qemu 程序无法正常运行。
若成功运行,则在 btproxy 界面会有如下显示:

若蓝牙设备未关闭,则会显示设备或资源忙:

建议每次运行前都关闭一次蓝牙设备:sudo hciconfig hci0 down 。
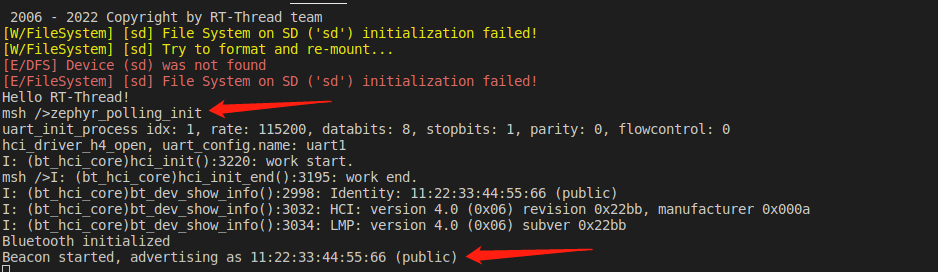
测试运行
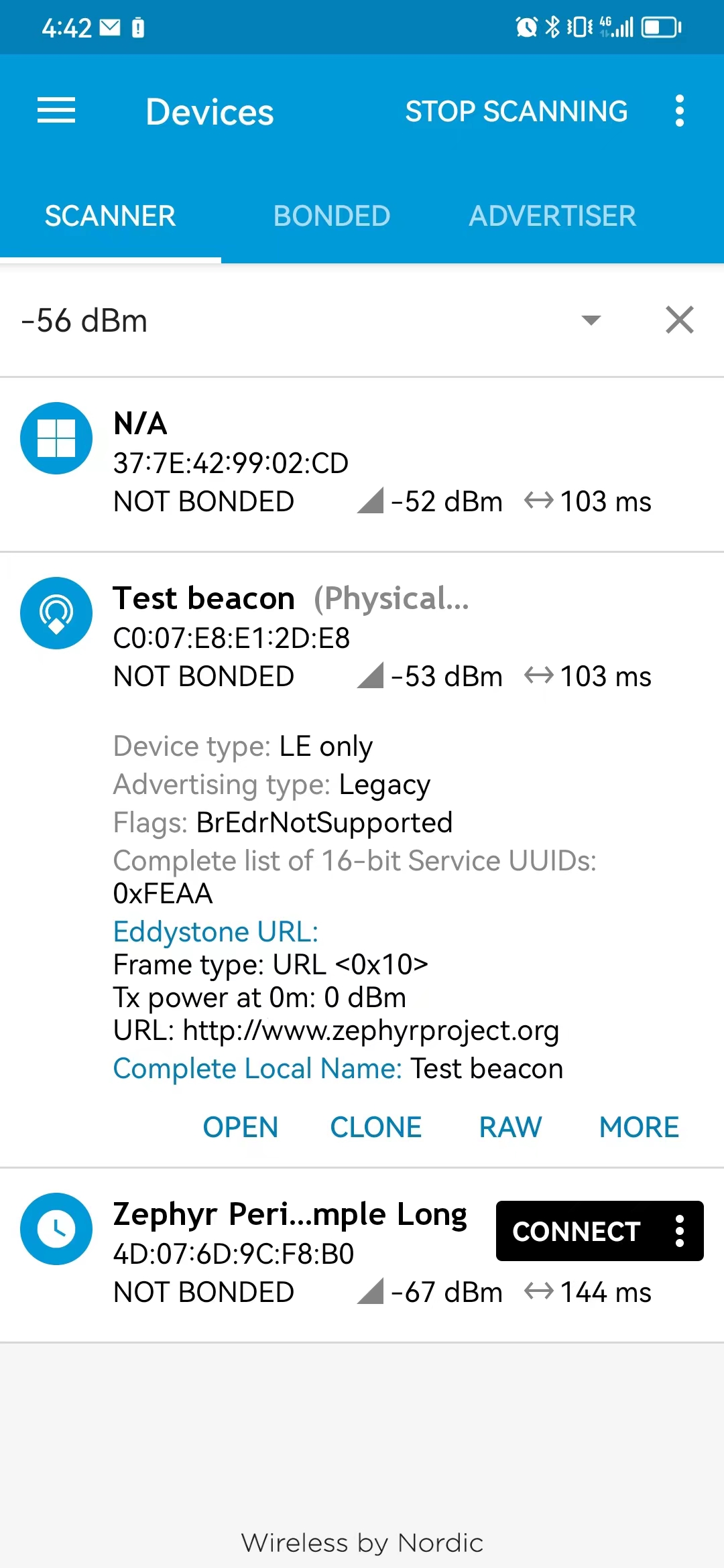
而后输入zephyr_polling_init既可以运行demo工程了。可以看到蓝牙地址是11:22:33:44:55:66。
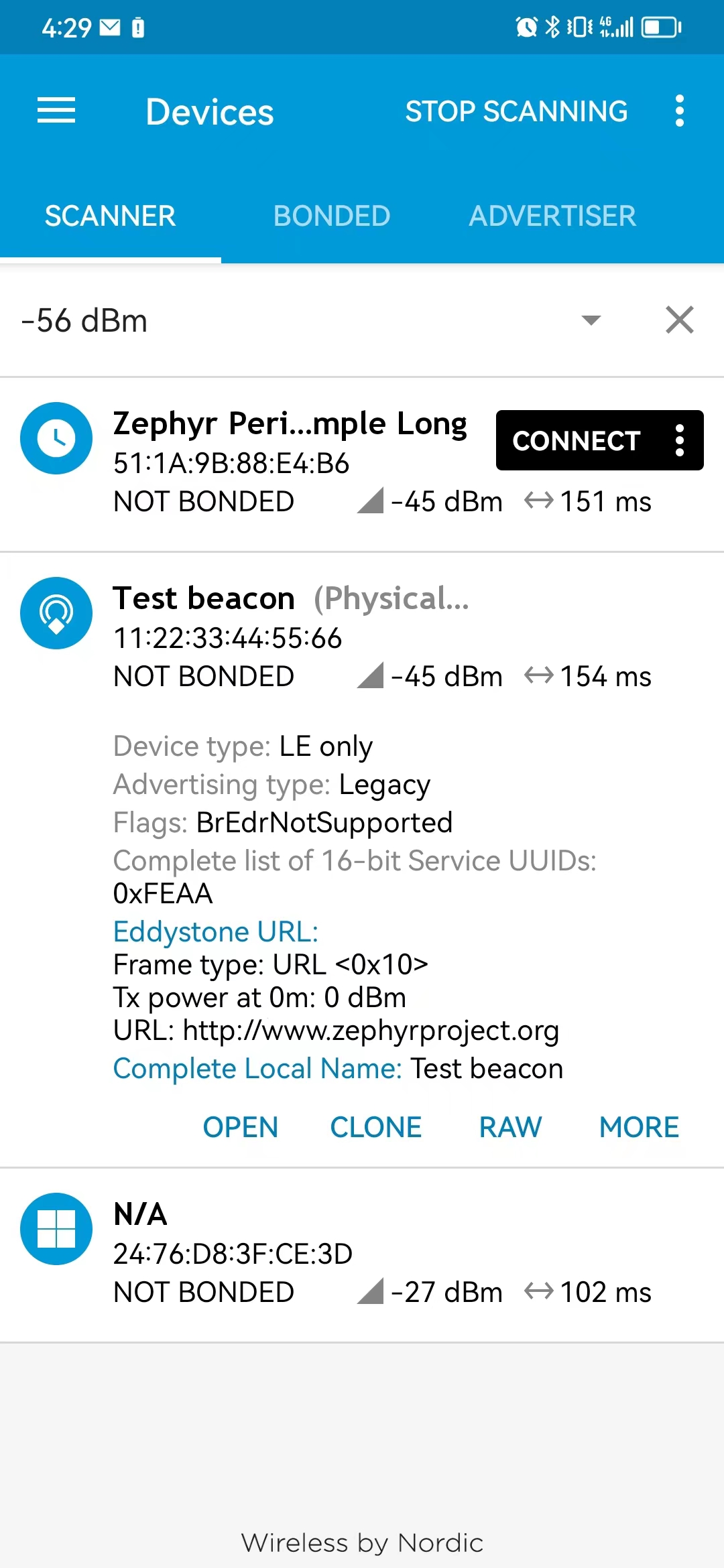
用nordic的app搜索,就可以看到发送的beacon数据包了。
串口方式
本节是参考:RT-Thread-QEMU下运行NimBLERT-Thread问答社区 - RT-Thread。
如果你手头就是一个uart设备,系统中还没驱动的情况下。
环境介绍
本次搭建环境所使用的资源和版本为:
- Ubuntu 18.04
- qemu - v2.11.1
- RT-Thread - v5.0.0
- 一个蓝牙UART模组
环境搭建
连接蓝牙 Control 芯片(使用 pts_dongle 进行演示,将其直接连接电脑)。
需要注意,下面的**/dev/ttyACM0**需要根据具体情况调整,看你实际的串口是哪个。Linux串口是默认普通用户没有读写权限的,每次开机后对串口读写都要附加权限。
sudo chmod 666 /dev/ttyACM0
qemu-system-arm -M vexpress-a9 -smp cpus=2 -kernel rtthread.bin -nographic -sd sd.bin -serial mon:stdio -serial /dev/ttyACM0
测试运行
而后输入zephyr_polling_init既可以运行demo工程了。可以看到蓝牙地址是c0:07:e8:e1:2d:e8。

用nordic的app搜索,就可以看到发送的beacon数据包了。
rtthread_artpi
rtthread在ArtPi硬件平台下和AP6212蓝牙实现。
RT-Thread Studio下利用ArtPi实现蓝牙功能
搭建 RT-Thread Studio 环境
参考完成快速开始 (rt-thread.org) RT-Thread studio 环境的搭建。
本文是参考: RT-Thread-如何在 ART-Pi 的 Studio 工程中使用 NimBLE 蓝牙协议栈RT-Thread问答社区 - RT-Thread来实现的。
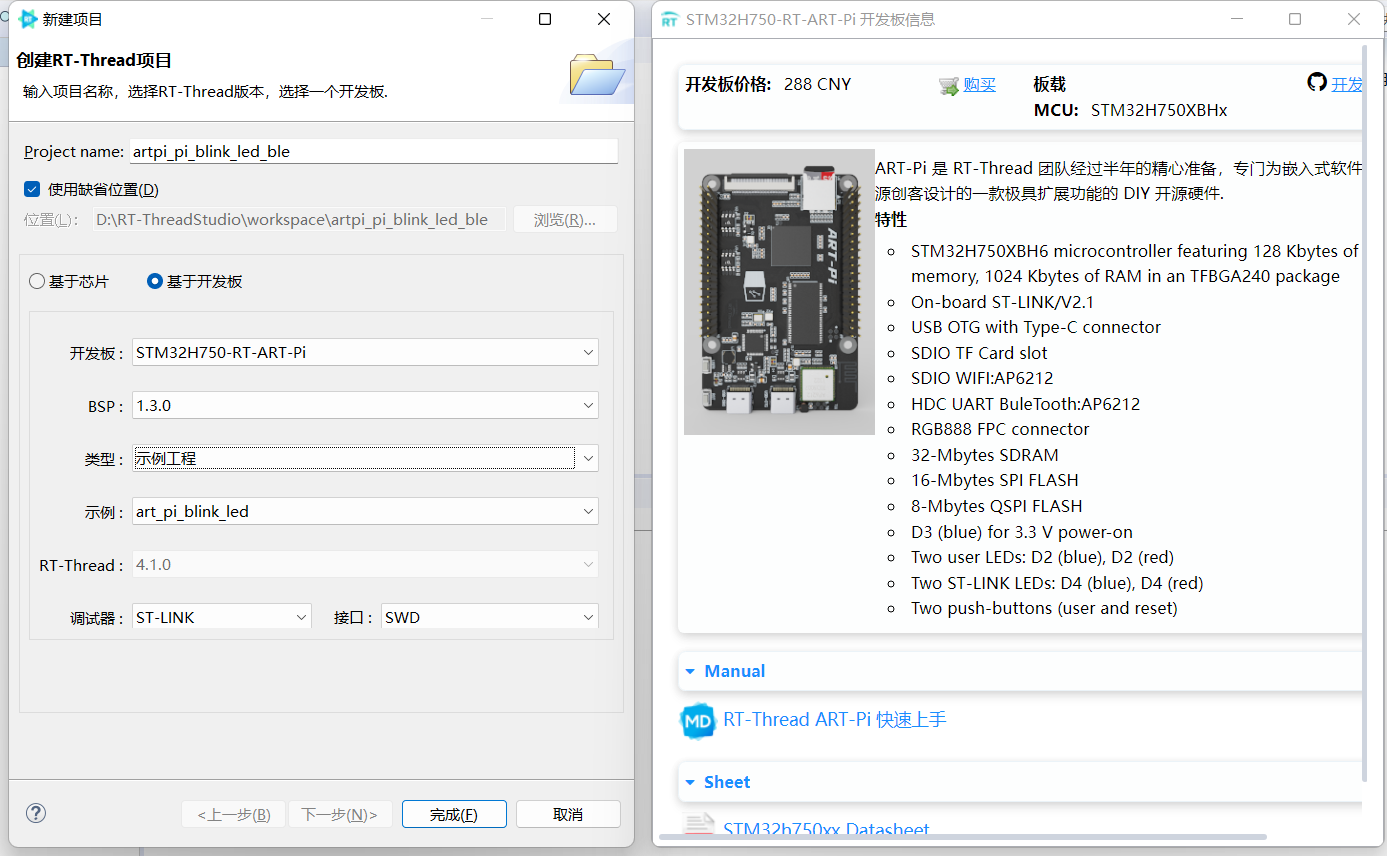
新建 ART-Pi 示例工程
按照下图新建一个 art_pi_blink_led 示例工程,等待创建完成。
配置使用 zephyr_polling
进入工程 RT-Thread Settings 界面, 进入到软件包页面,找到zephyr_polling,并按照下面的参数配置好。
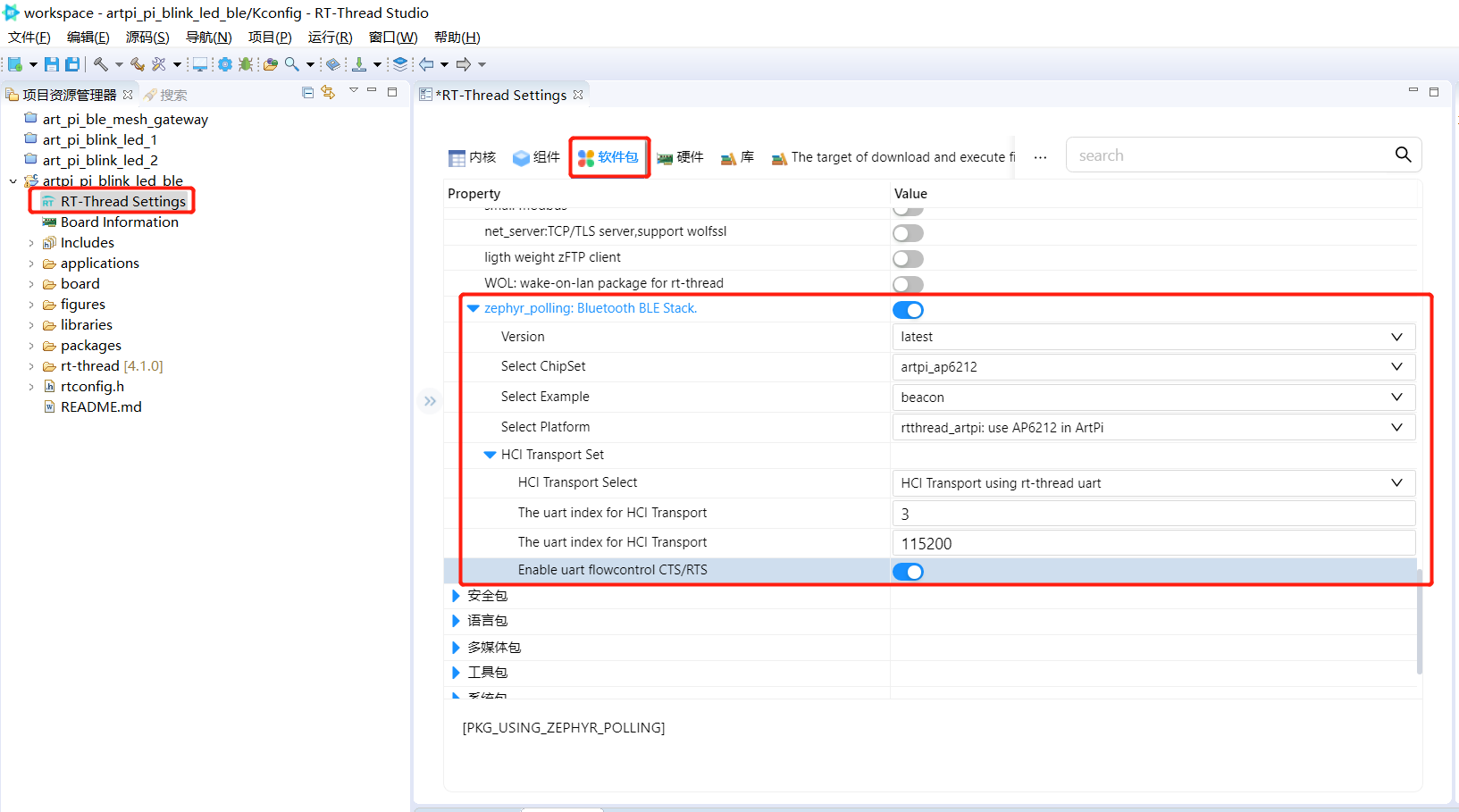
配置完成后保存,studio 将自动更新下载软件包。
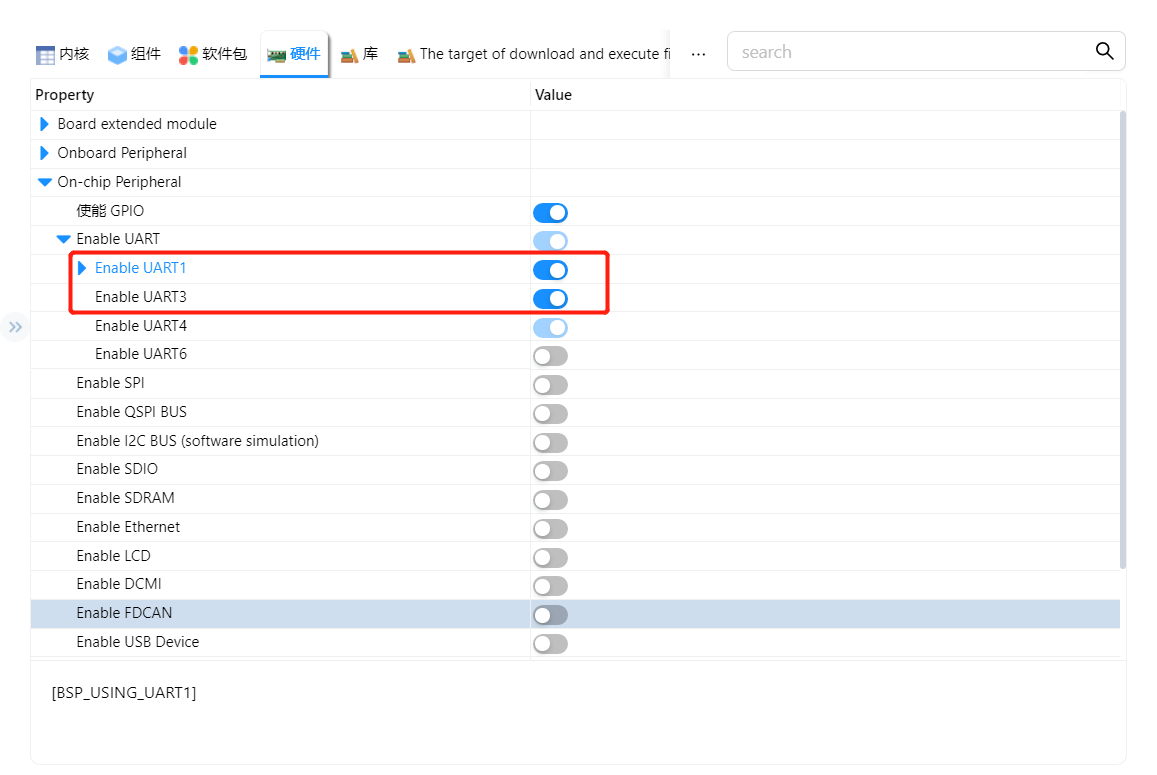
配置相关串口
在 RT-Thread Settings 下硬件选项页中使能对应串口,如下图,按照实际需求开启。AP6212内部接的是UART3,所以UART3必须打开。
串口接收buffer记得调整一下。
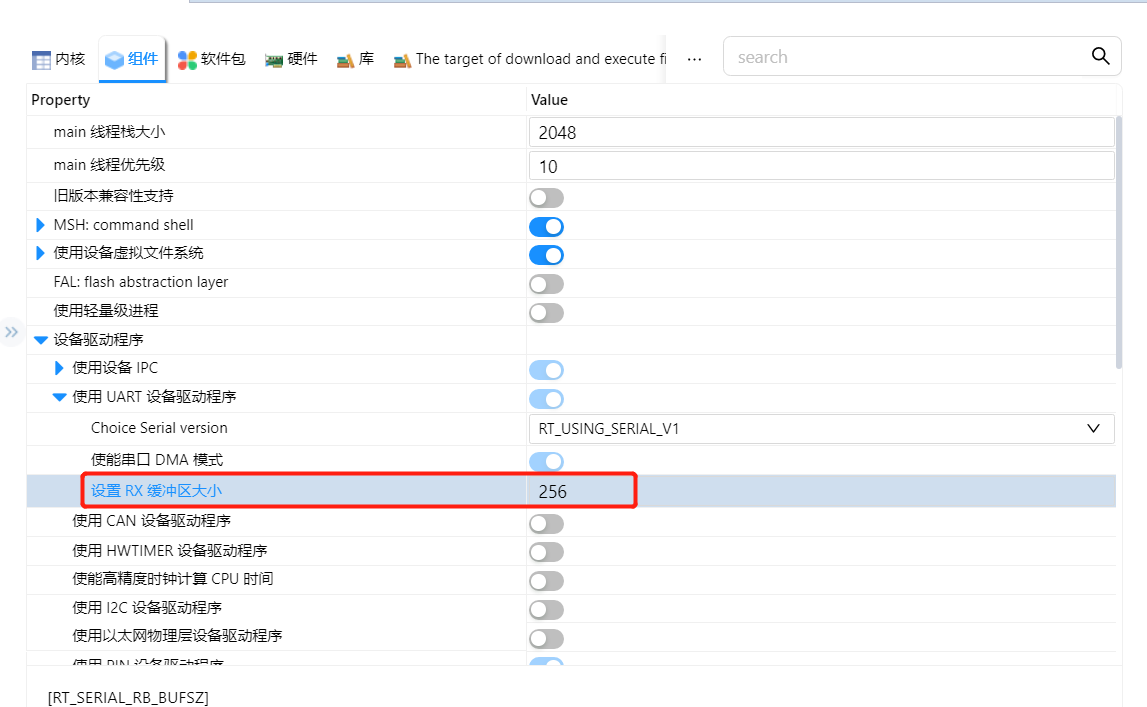
保存退出。
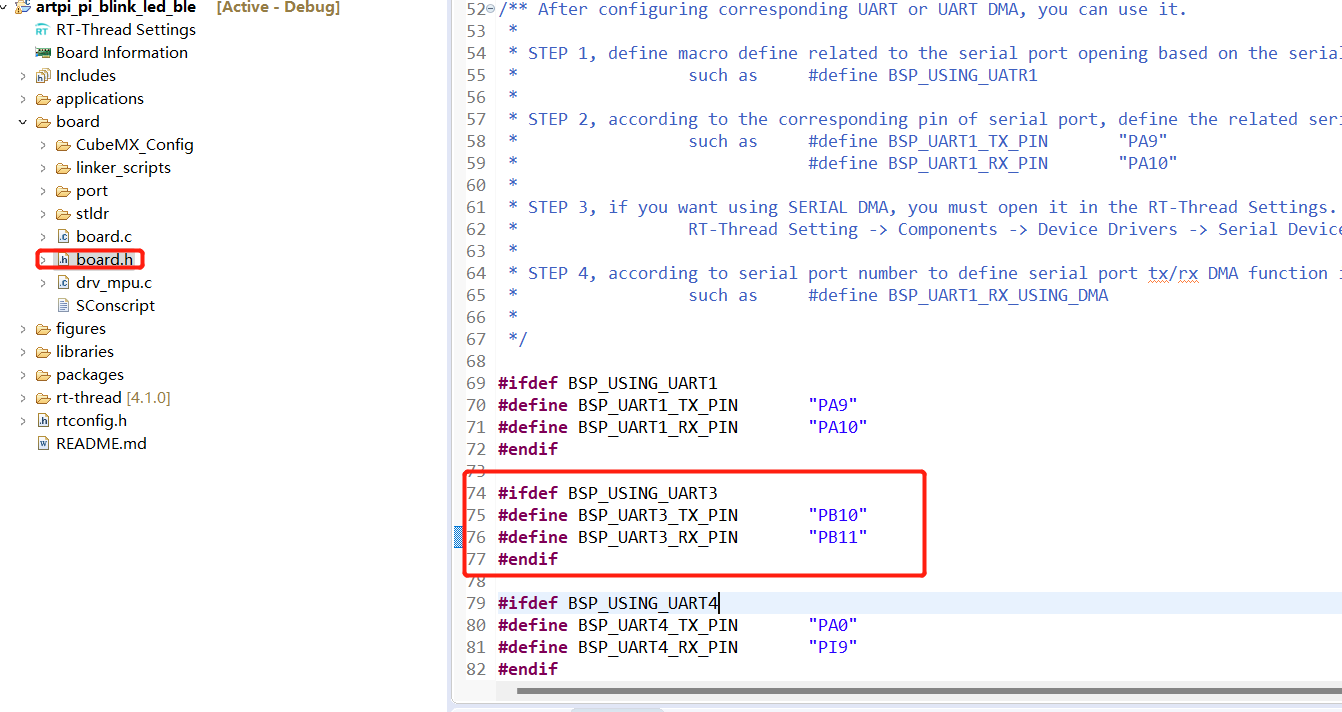
在 borad.h 头文件中添加对应串口的引脚定义。
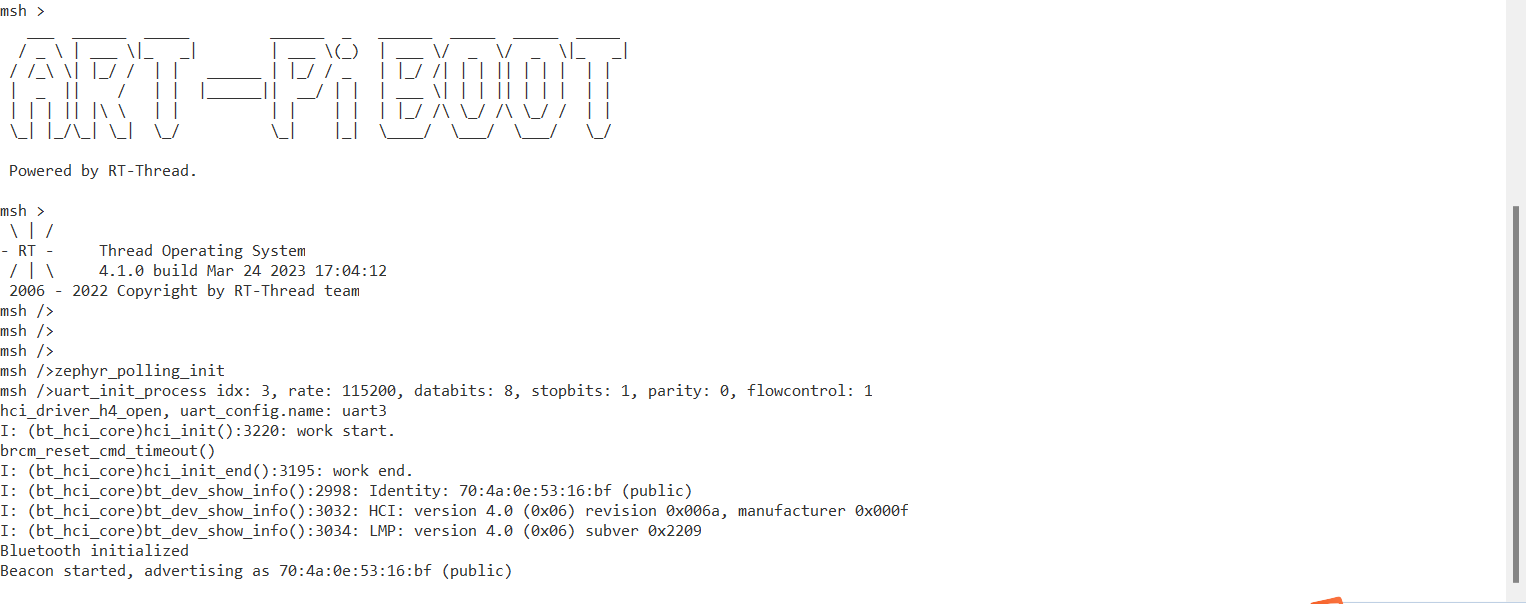
编译运行
直接烧录进去即可,这里直接使用 ART-Pi 板载的 AP6216 芯片。而后输入zephyr_polling_init指令,启动beacon程序。
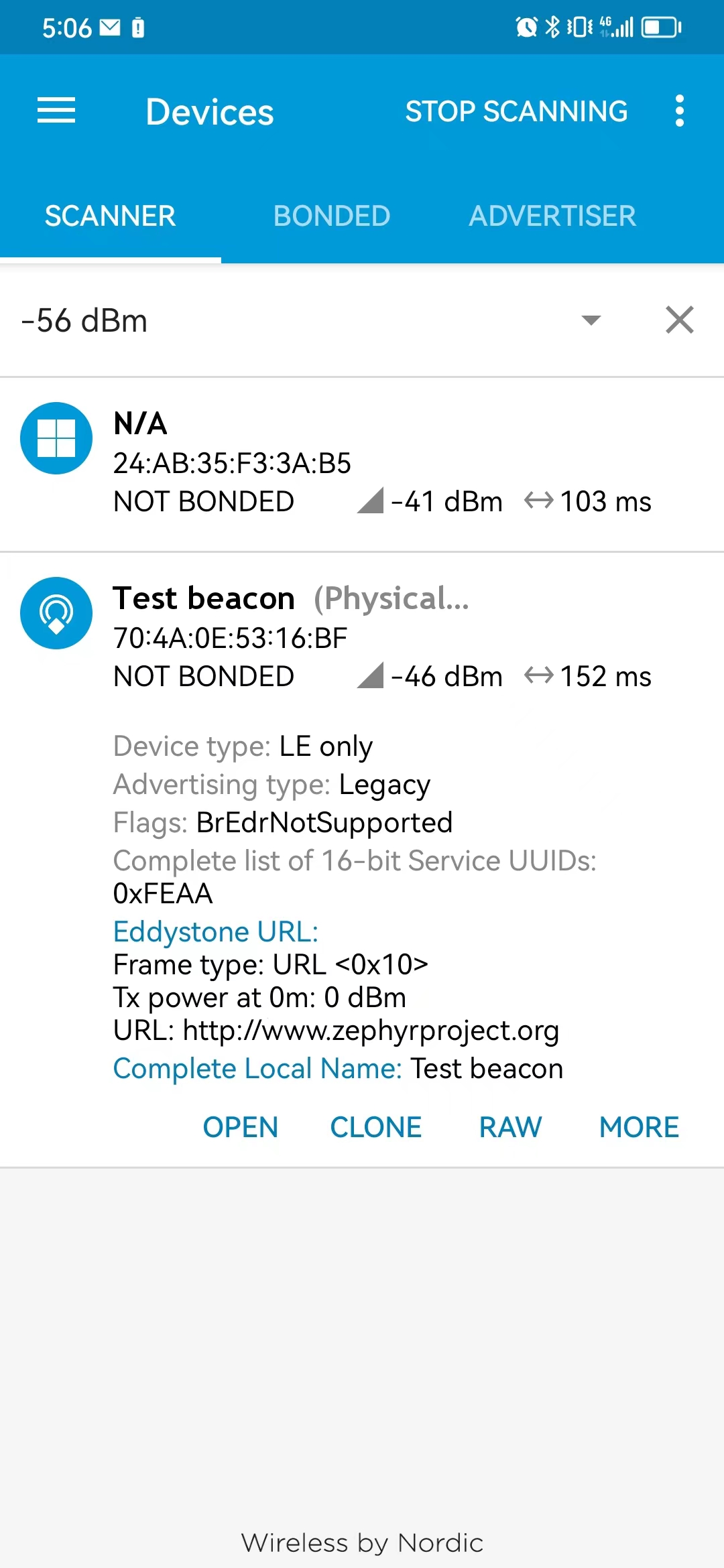
使用 nRF Connect 手机 APP 即可成功观察到蓝牙设备地址为70:4a:0e:53:16:bf的beacon设备。


















 1269
1269

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











