







主页传送门:📀 传送
概述
目录结构
按照功能模块划分:
|-cyber 消息中间件,替换ros作为消息层
|-docker 容器相关
|-docs 文档相关
|-modules 自动驾驶模块,主要的定位,预测,感知,规划都在这里
|-calibration 校准,主要用于传感器坐标的校准,用于感知模块做传感器融合
|-canbus 通讯总线,工业领域的标准总线,鉴于工业界的保守,我估计后面会有新的总线来取代
|-common
|-contrib
|-control 控制模块,根据planning生成的路径对车辆轨迹进行控制,再底层就是发送命令到can总线,实现车辆的控制。
|-data 地图等生成好的数据放在这里(其他数据待补充)
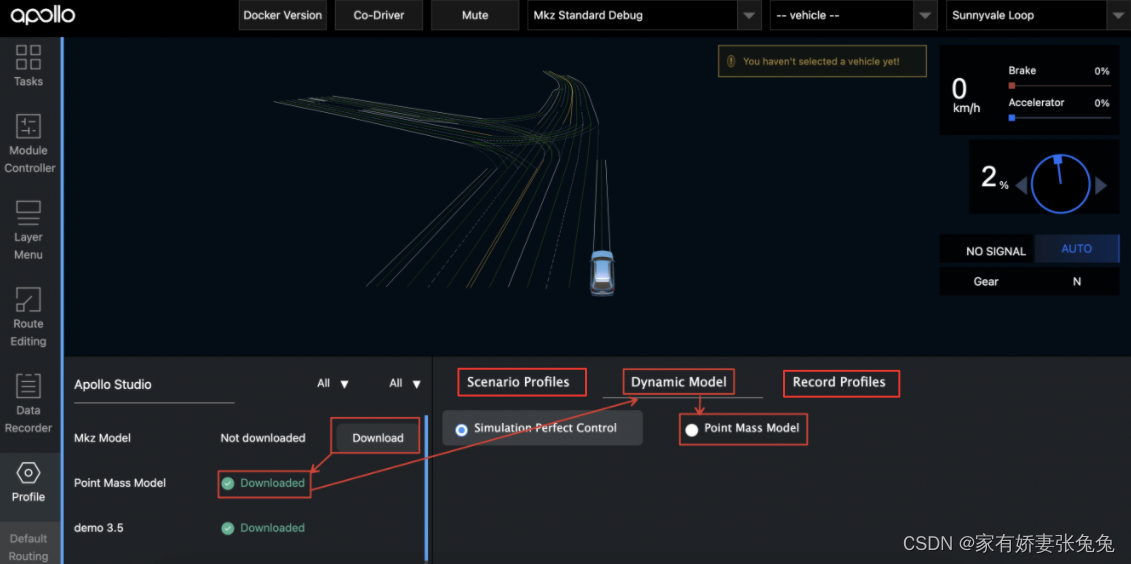
|-dreamview 仿真,能够对自动驾驶过程中的数据进行回放,其他厂家也有推出一些仿真平台,后面有机会再介绍下
|-drivers 雷达,lidar,GPS, canbus,camera等驱动
|-guardian 监护程序
|-localization 定位,获取汽车的当前位置
|-map 地图模块
|-monitor 监控模块,主要是监控汽车状态,并且记录,用于故障定位,健康检查等
|-perception 感知,获取汽车当前的环境,行人,车辆,红绿灯等,给planning模块规划线路
|-planning 规划,针对感知到的情况,对路径做规划,短期规划,只规划100-200M的距离,生成好的路径给control模块
|-prediction 预测,属于感知模块,对运动物体的轨迹做预测
|-routing 导航线路,就是百度地图上查询2点之间的线路,生成的线路短期规划还是planning模块
|-third_party_perception 第三方感知模块
|-tools 工具,这里面的工具倒是很多,后面再详细介绍下
|-transform 转换
|-v2x 顾名思义就vehicle-to-everything,其希望实现车辆与一切可能影响车辆的实体实现信息交互,
目的是减少事故发生,减缓交通拥堵,降低环境污染以及提供其他信息服务.
|-scripts 脚本
|-third_party 第三方库
|-tools 工具目录,基本就是个空目录
功能模块
定位 - 知道汽车在哪里,这里的定位可能涉及方方面面,比如GPS,但是GPS的精度只有米级别,在下面几个场景会不太合适,比如你在桥洞里,GPS信号不好的情况,另外还有一种情况是,停车的时候,你要知道前后车的距离,另外比如在雪天或者路况复杂的情况,这些情况下,仅有的GPS信号可能不能满足我们的要求,因此无人车又增加了激光雷达来测量周围环境的距离,而且可以精确到厘米。
因此产生了高精地图的需求,高精地图可以把周围的3D环境都记录下来,这样我们就可以通过3D图像来匹配周围的场景,来找到自己的位置,而且高精地图还可以记录比地图多的多的东西,比如红绿灯的位置,交通标志,左转还是右转道.通过高精地图我们不仅可以知道道路情况,还可以知道车辆需要获取的一些其他信息,让车辆知道自己的实时位置。
感知 - 我们总是希望车辆行驶在马路中间,这样更加安全,这就需要追踪到道路的路牙线,而道路随时会出现拐弯,那么追踪路牙线就用到了图像处理技术,另外还要感知到什么是车辆,什么是行人,主要涉及到图像的语义分割,感知是自动驾驶中最难,而且最具有挑战性的一块,因为只有感知到周围的行人,车辆,以及突发状况,才能为后面规划线路。
规划 - 目前已经知道当前道路情况,而且也已经感知到前面的车辆或者行人,如何去规划我们的行驶线路呢,这里需要解决的就是2个点之间的线路,而且行驶中途可能会出现新的情况,又需要重新规划线路,还有一种情况是,通过高精地图,我们已经知道前面需要转弯了,我们可以提前调整线路来适应这种需求。
控制 - 现在已经规划出了一条线路,剩下的就是控制汽车,按照已经规划好的线路行驶,而且如果遇到突发状况,需要立即停车,而且控制汽车能够按照预定的线路不会出现很大的偏离,这就是控制要做的事情。
编译
apollo采用的是bazel来进行编译。bazel就是c++对应的编译管理,bazel主要是通过WORKSPACE和BUILD文件来进行编译。
福利活动
加入课程

Apollo开发者社区 观看课程学习apollo
课程进度可以拖动 几秒就能完成。
学完填表选心仪的奖品领奖就行

















 1105
1105











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











