








紧接着之前的博客,我们继续来看faster rcnn中的AnchorTargetLayer层:
该层定义在lib>rpn>中,见该层定义:
首先说一下这一层的目的是输出在特征图上所有点的anchors(经过二分类和回归);
(1)输入blob:bottom[0]储存特征图信息,bottom[1]储存gt框坐标,bottom[2]储存im_info信息;
(2)输出blob:top[0]存储anchors的label值(fg是1,bg是0,-1类不关心),top[1]存储的是生成的anchors的回归偏移量,即论文中的tx,ty,tw,th四个量(所以说整个faster rcnn总共两次bbox回归,第一次在RPN中,第二次在fast rcnn中),top[2]和top[3]分别存储的是bbox_inside_weights和bbox_outside_weights,这两者的具体形式后面再说,作用还不是很清楚;
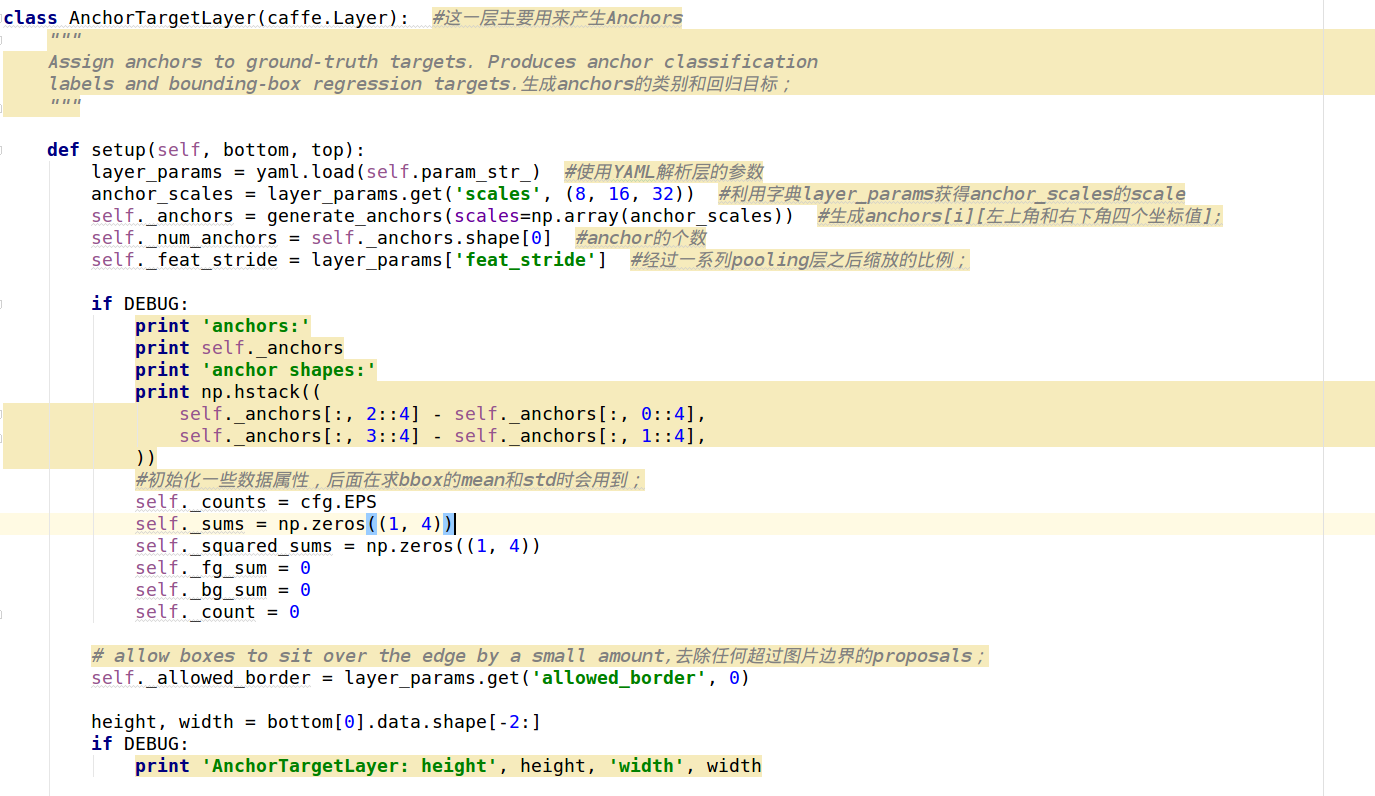
好的,先进入层的setup函数:
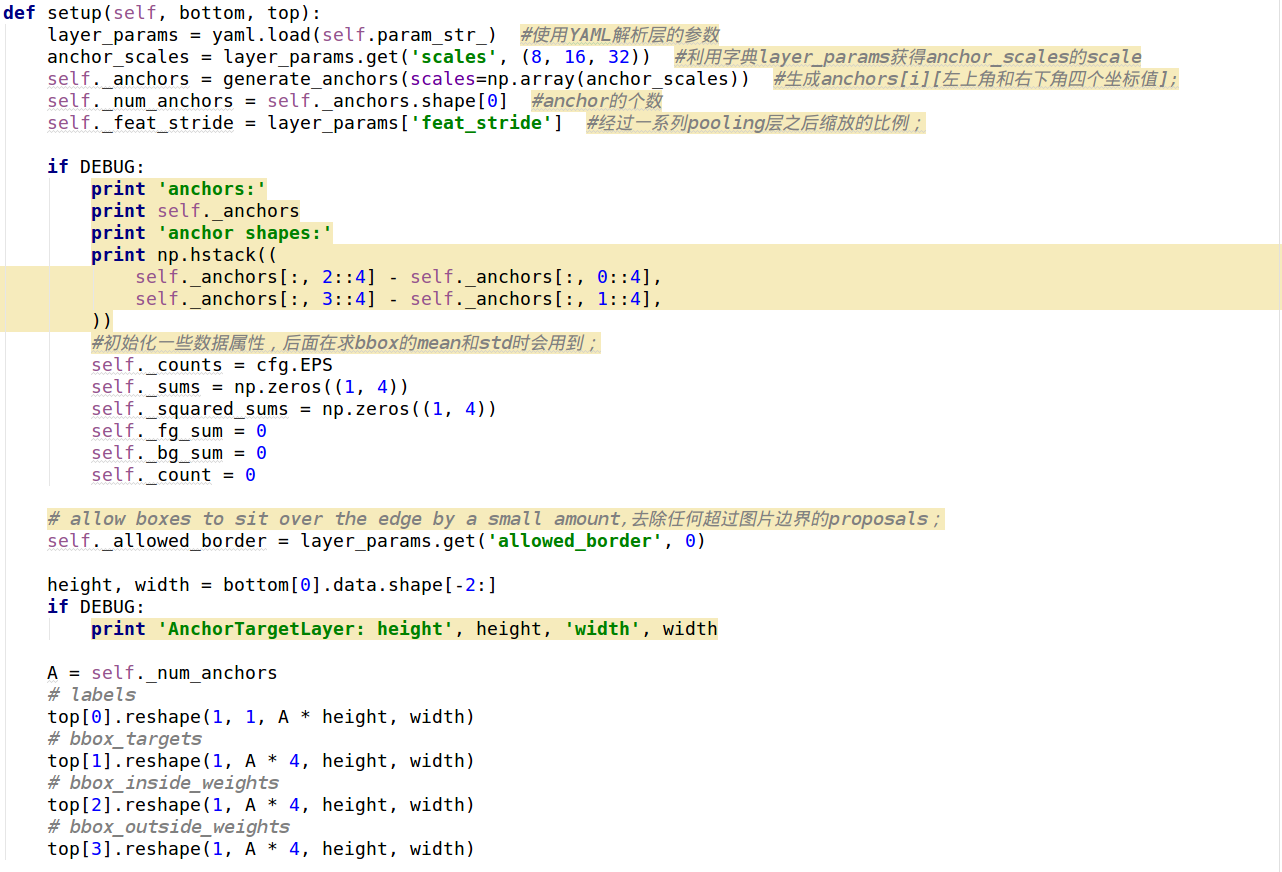
该函数通过解析父类对自己的一些参数进行初始化,同时定义该层的输入输出blob;
该函数中要注意的是generate_anchors()函数,它的作用是产生对应与特征图上最左上角那个点的九种anchor(尺寸对应与输入图像),这9个anchor在后面被用来产生所有图像上的anchors,进入generate_anchors()函数:
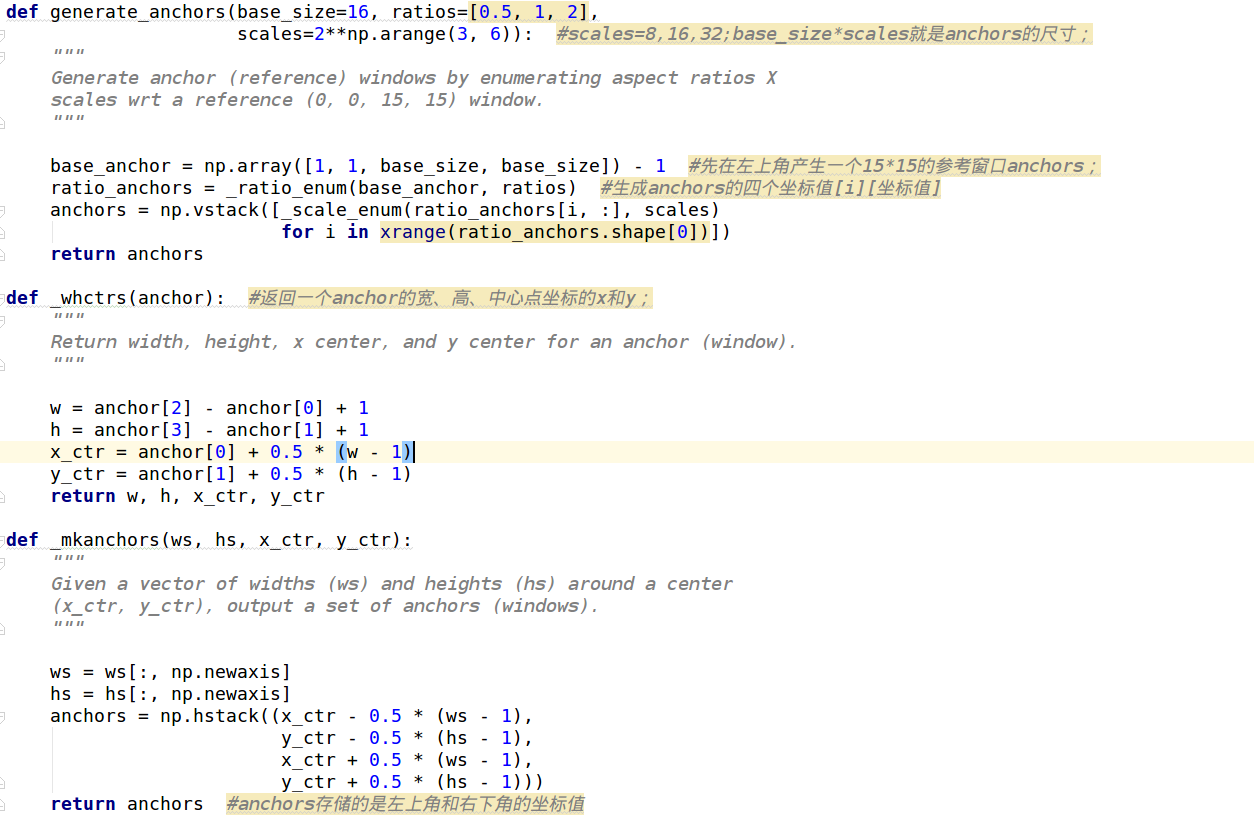
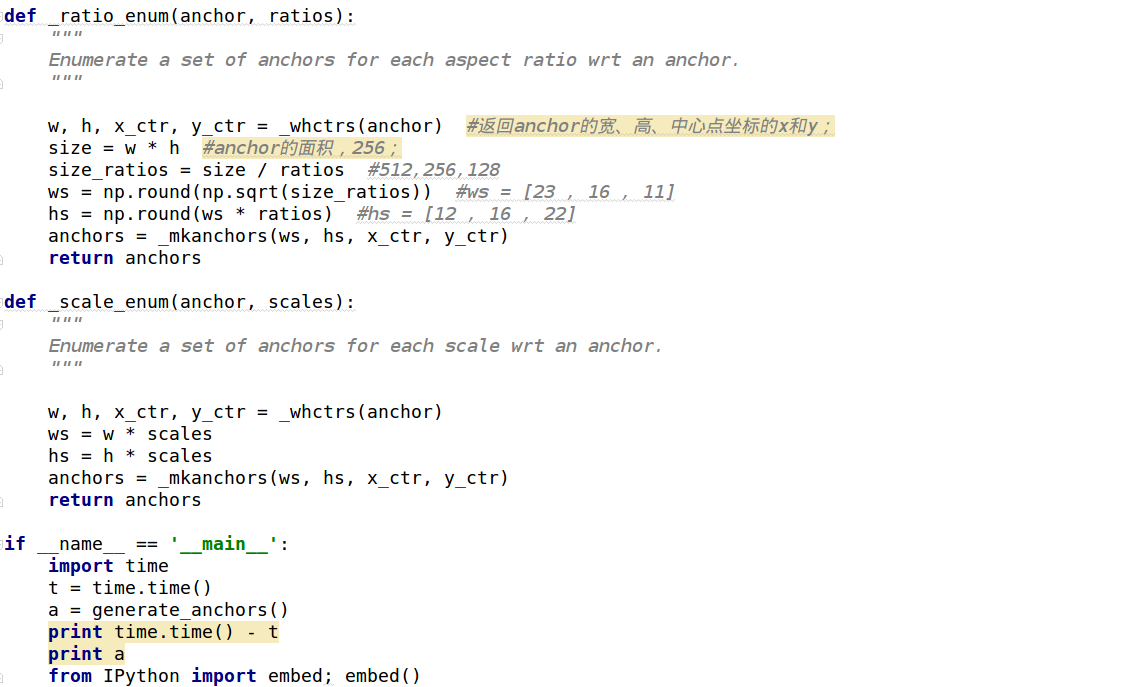
三种长宽比(0.5,1,2)和三种参考尺寸(128,256,512)形成了九种anchors(注意这里只是参考尺寸,是用来计算anchors尺寸时用到的三种规格,并不是说anchors的规格就是这三种);
接着向下看该层的前向传播函数forward函数:
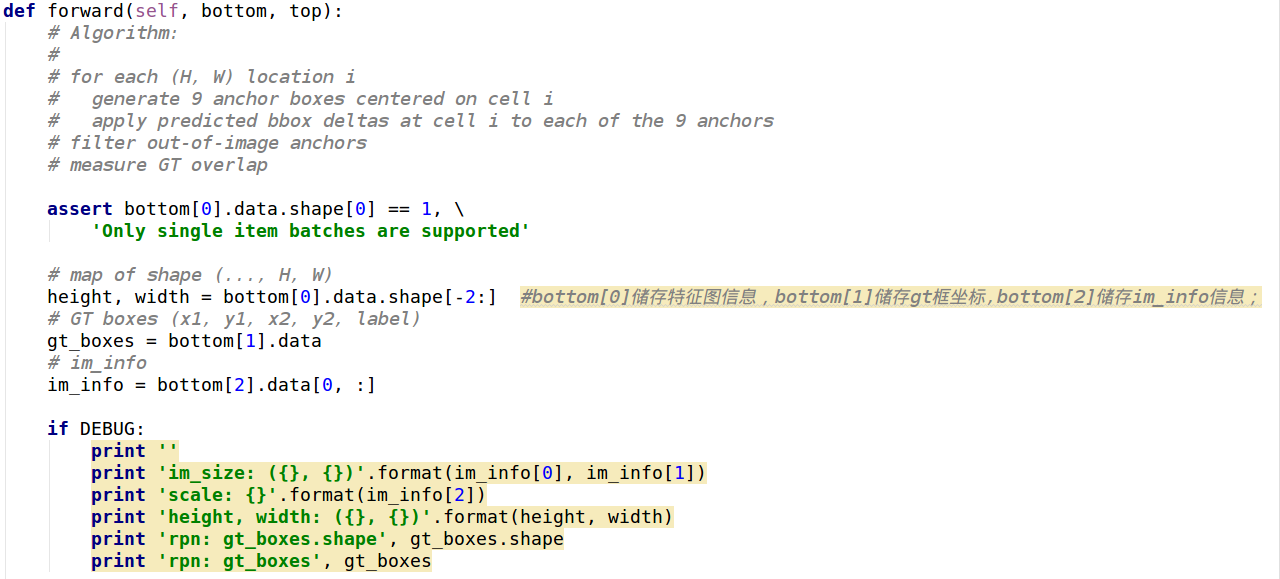
这里获得输入bottom[0]、bottom[1]、bottom[2],继续:

这里的shift_x和shift_y分别对应x和y轴上的偏移量,用在之前说过的用generate_anchors()函数生成的最左上角的anchors上,对其进行偏移,从而获得所有图像上的anchors;all_anchors用来存储所有这些anchors,total_anchors用来存储这些anchors的数量K×A,其中,K是输入图像的num,A是一幅图像上anchor的num;之后作者还对这些anchors进行了筛选,超出图像边界的anchors都将其丢弃~继续:
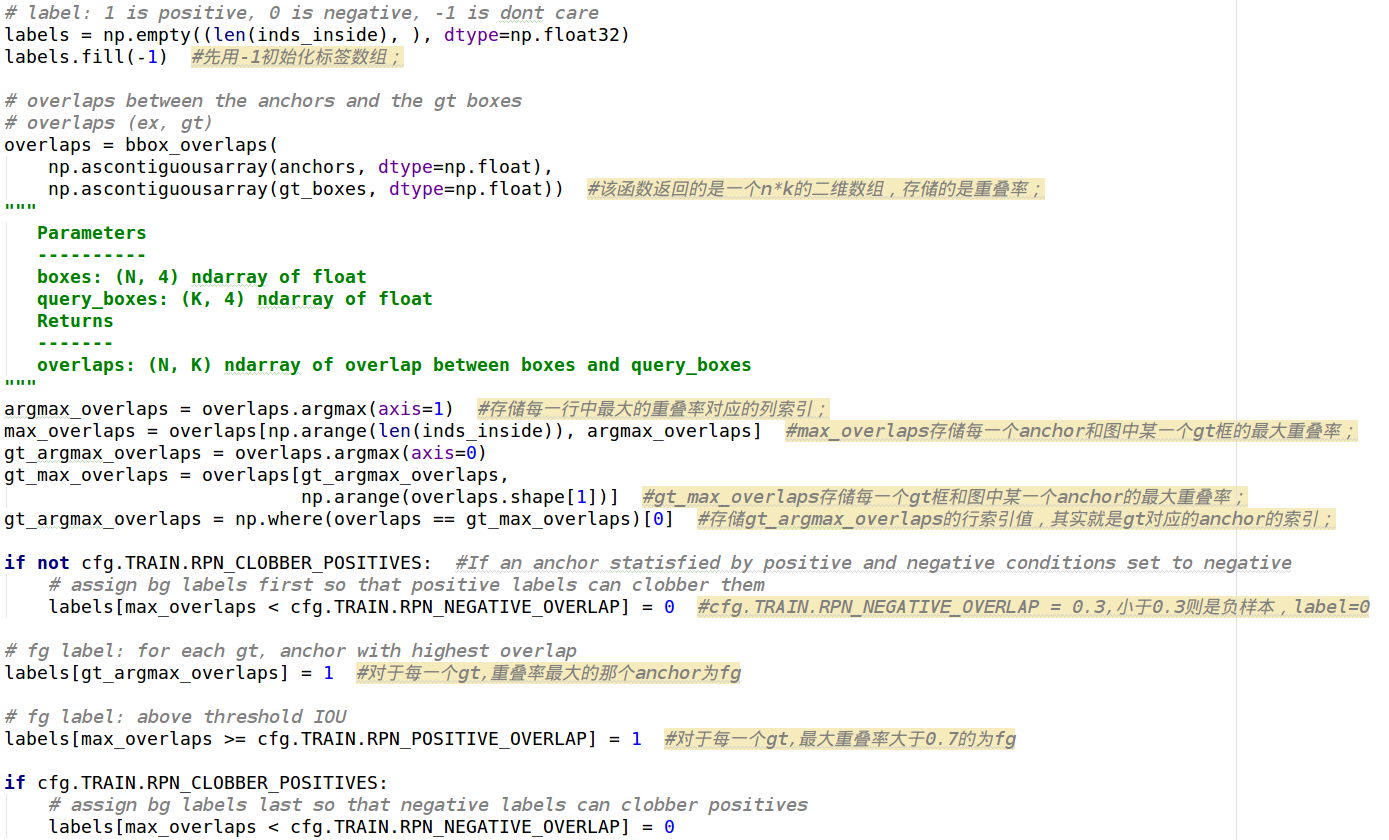
这一部分主要就是获得这些anchors和对应gt的最大重叠率的情况,以及正样本的划分标准:a.对于每一个gt,重叠率最大的那个anchor为fg;b,对于每一个gt,最大重叠率大于0.7的为fg;
cfg.TRAIN.RPN_CLOBBER_POSITIVE则涉及到一种情况,即如果最大重叠率小于cfg.TRAIN.RPN_NEGATIVE_OVERLAP=0.3,则到底正还是负,这里的cfg.TRAIN.RPN_CLOBBER_POSITIVE默认是False;
继续:

这一部分是说,如果我们得到的正样本或者负样本太多的话,那么就选取一定数量的,丢弃一定数量的anchors,应该是为了加速(这里的选取方法也很直接,就是随机选取),继续:
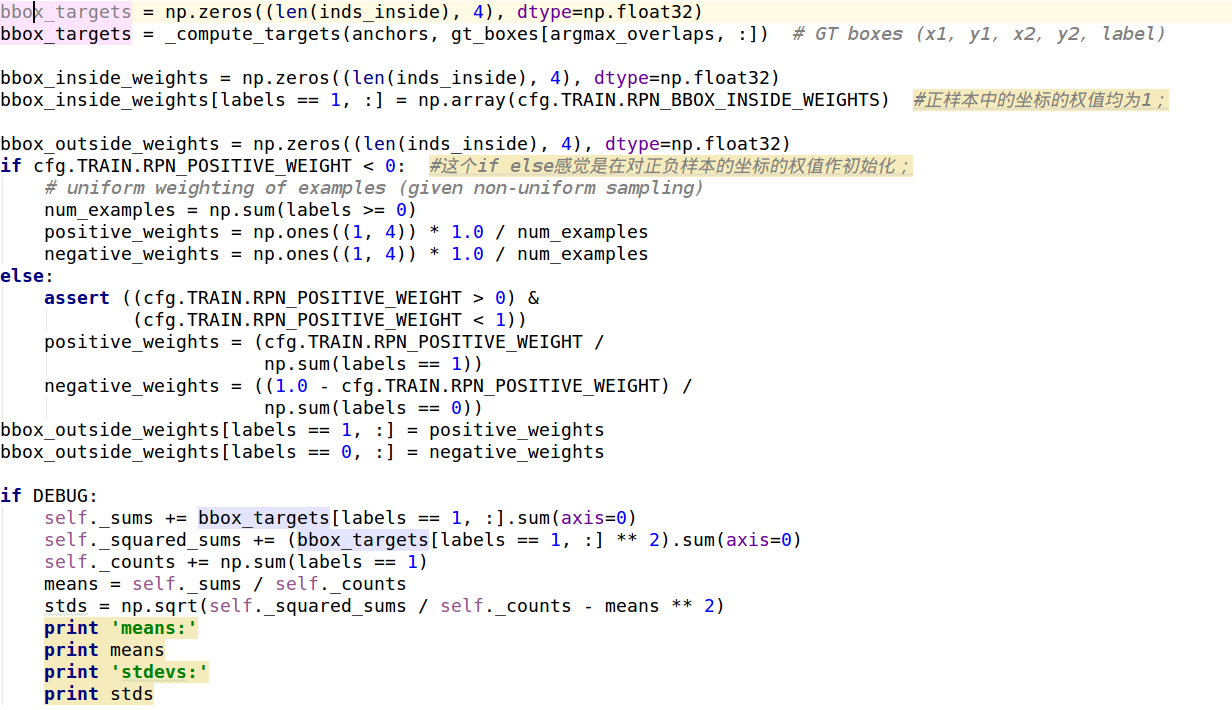
这一部分是生成bbox_targets、bbox_inside_weights、bbox_inside_weights;其中对于bbox_targets,它这里是调用了_compute_targets()函数,见:

在该函数又接着调用了bbox_transform函数,见:

从而得到了论文中所需要的四个偏移量tx,ty,tw,th四个量;
而对于后两个bbox_inside_weights和bbox_outside_weights,函数中定义的是bbox_inside_weights初始化为n×4的0数组,然后其中正样本的坐标的权值均为1;而bbox_outside_weights同样的初始化,其中正样本和负样本都被赋值1/num(anchors的数量),还有另一种非统一的赋值方式在else中,这里就不说了;继续:

这里则是通过_unmap()函数实现将之前在所有图像上产生的anchors都赋上label、bbox_targets、bbox_inside_weights、bbox_outside_weights属性,见该函数:
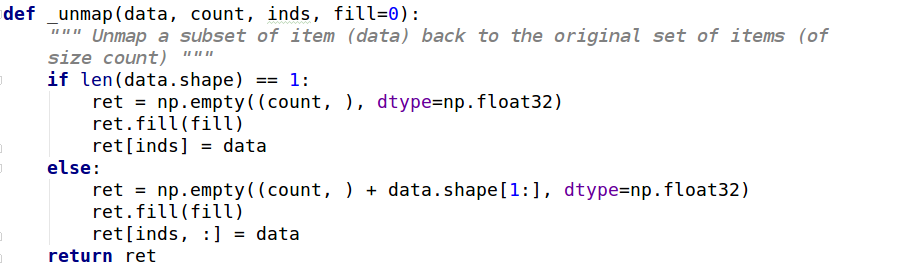
之后会把这些属性信息经过reshape封装进该网络层的输出blob,即top[0]、top[1]、top[2]、top[3]中;之后:

由于该层不需要反向传播,所以backward函数也不需要写了,在前向传播中已经reshape了,就不用再写reshape函数了~
好了,到此,AnchorTargetLayer层的定义就写到这儿,若有错误请指出~
http://www.cnblogs.com/zf-blog/p/7307502.html















 6727
6727











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









