









目录
动态规划和强化学习的关系,以及优缺点比较。请详细进行解释
**动态规划(Dynamic Programming, DP)和强化学习(Reinforcement Learning, RL)**都是用于决策问题的优化方法,但它们在理论背景、实现方式和应用场景上有所不同。
下面将详细探讨这两者的关系及各自的优缺点。
一、动态规划和强化学习的关系
-
相似性:
- 目标相似:两者都旨在解决最优决策问题,也就是找到一个策略,使得智能体在不同状态下采取的动作可以最大化长期回报(或奖励)。
- 基础概念相似:在强化学习和动态规划中,通常都会涉及价值函数(Value Function)和最优策略(Optimal Policy)的计算。它们都试图通过估计状态的价值来指导决策过程。
- Bellman方程:动态规划和强化学习都基于Bellman方程。动态规划直接使用完整的状态转移模型来递归地计算状态的价值,而强化学习则通过与环境的交互来估计这些价值。
-
区别:
- 环境模型:
- 动态规划假设我们已经知道环境的模型(即状态转移概率和奖励函数),因此可以通过递推的方法直接计算最优策略。
- 强化学习则通常在未知环境下进行学习。智能体通过与环境的交互来获得经验,进而估计出最优策略。强化学习不要求环境的完整知识,可以处理部分可观测的环境。
- 计算方法:
- 在动态规划中,我们通过穷举所有状态的方式计算最优解,通常使用值迭代或策略迭代方法。
- 强化学习通过样本学习的方式,从与环境的交互中逐步获得信息,采用Q学习、蒙特卡罗方法或策略梯度方法等技术。
- 环境模型:
-
动态规划是强化学习的基础:
- 强化学习中的许多算法(如Q-learning、SARSA等)本质上都可以视为动态规划的近似或扩展。强化学习通过与环境的交互逐步逼近动态规划方法所得到的最优解,尤其是在模型未知的情况下。强化学习常常使用类似动态规划的Bellman更新公式来更新值函数或策略,但不要求已知环境的精确模型。
二、动态规划和强化学习的优缺点比较
动态规划的优缺点
优点:
- 理论基础:动态规划提供了一个严格的理论框架,基于Bellman方程和最优性原理,能够为确定性问题提供最优解。
- 精确性:在已知环境的模型时,动态规划能够精确计算出最优策略,不需要依赖与环境的交互。
- 可解释性:动态规划的求解过程清晰明确,可以提供完整的最优值函数或策略。
缺点:
- 状态空间爆炸:动态规划需要遍历所有可能的状态和动作,这在大规模状态空间中可能导致计算复杂度极高,尤其是对于连续状态空间问题而言。
- 模型要求:动态规划要求已知环境的完全模型(即转移概率和奖励函数)。如果环境是部分可观测或未知的,动态规划无法直接应用。
- 不可扩展:当状态空间非常庞大(例如,高维空间或复杂任务)时,动态规划的计算会变得不可扩展,需要很大的存储和计算能力。
强化学习的优缺点
优点:
- 不需要环境模型:强化学习最大的优点是能够在无模型的情况下工作,即使环境的转移概率和奖励函数不完全已知,智能体也能够通过与环境的交互逐步学习最优策略。
- 适应性:强化学习可以适应动态和复杂的环境。在不完全可观测的环境中,强化学习仍然可以通过采样和试错逐渐学习到较优的策略。
- 可扩展性:强化学习尤其在深度强化学习(如DQN)中,通过深度神经网络的泛化能力,能够处理高维、复杂状态空间,适用于大规模和高维问题(如视频游戏、机器人控制等)。
缺点:
- 样本效率低:强化学习通常需要大量的与环境的交互才能收敛到最优解,尤其在探索-利用问题中,收敛速度可能非常慢。
- 不稳定性和收敛性:强化学习的训练过程可能非常不稳定,特别是在复杂环境中,由于过度依赖随机样本,可能导致策略的波动性和收敛性问题。
- 策略优化困难:一些强化学习算法(如Q-learning)可能需要复杂的策略搜索或近似方法,尤其在状态空间大时,直接求解最优策略变得非常困难。
三、总结
- 动态规划适用于环境模型已知的情况,能够提供最优解,但计算复杂度较高且难以扩展到大规模问题。它的缺点主要是依赖环境模型和在大规模问题中的计算复杂度。
- 强化学习能够在未知环境中通过与环境的交互学习最优策略,适应性强且具有较好的扩展性,尤其适用于大规模、复杂、动态的任务。但是,强化学习通常需要大量的样本和时间才能收敛,且训练过程可能不稳定。
在实际应用中,强化学习通常用于动态规划无法处理的问题(例如,模型未知或状态空间巨大)。而当问题规模较小且已知环境模型时,动态规划则提供了一种精确的解决方案。
Bellman方程是什么。请详细进行解释
Bellman方程是动态规划(Dynamic Programming)和强化学习(Reinforcement Learning)中的一个核心概念,它描述了一个决策过程中的最优策略或最优价值的递归关系。
这个方程最早由Richard Bellman在1950年代提出,是解决最优化问题的一个重要工具,尤其在动态决策和多阶段决策过程中广泛应用。
Bellman方程的核心思想
Bellman方程的核心思想是将一个复杂的决策问题分解成多个简单的子问题,通过递归方式从最简单的子问题开始逐步解决,从而得到全局最优解。具体来说,Bellman方程提供了一种方式来计算每个状态下采取的最优策略或最优价值,它依赖于该状态的即时奖励和从该状态出发后可能的未来状态的价值。
Bellman方程的形式
在强化学习中,Bellman方程通常有两种常见形式:
-
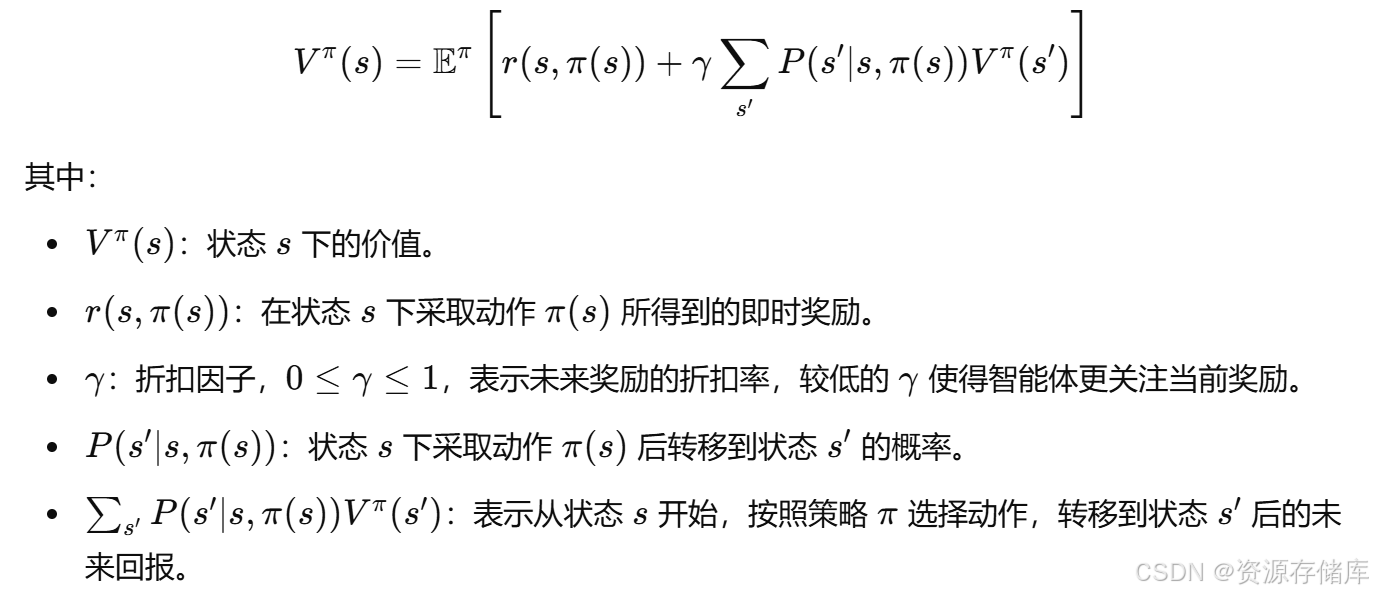
状态值函数(State Value Function):该方程给出了一个状态的价值,即从该状态出发,遵循某一策略能获得的期望回报。
-
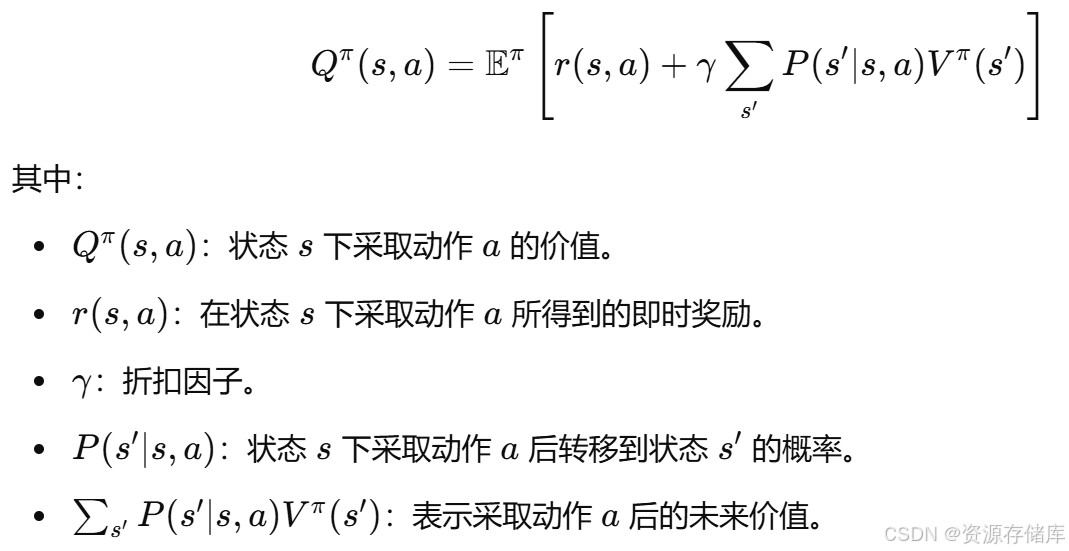
动作值函数(Action Value Function):该方程给出了在某一状态下采取某一动作的价值,即从该状态采取某个动作,随后遵循某一策略能获得的期望回报。
1. 状态值函数的Bellman方程
假设有一个马尔可夫决策过程(Markov Decision Process, MDP),其状态空间为S,动作空间为A,在每个状态s下,智能体可以选择一个动作a,从而根据转移概率和奖励函数决定下一个状态和获得的奖励。
状态值函数
表示的是在状态 s下,遵循策略 π时,能够获得的期望总回报(从该状态开始,依次采取策略 π 所得到的回报的期望值)。
Bellman方程的形式如下:
2. 动作值函数的Bellman方程
在动作值函数的情况下,我们关心的是在特定状态下,选择特定动作之后的价值。动作值函数 表示的是在状态 s 下采取动作 a,然后遵循策略 π所能获得的期望回报。它的Bellman方程形式如下:
Bellman方程的递归性
Bellman方程的递归性是其核心特点。
它表示某一状态的价值(或某一状态-动作对的价值)依赖于该状态的即时奖励以及从该状态-动作对出发的后续状态的价值。
这个递归关系帮助将问题从整体的最优解分解成每个小子问题的最优解。
Bellman最优性方程
对于最优策略而言,Bellman方程有一个最优性版本,称为Bellman最优性方程。
它描述了在最优策略下的价值函数。
-
最优状态值函数 V∗(s) 表示的是在状态 s 下,遵循最优策略时能获得的最大期望回报。

-
最优动作值函数 Q∗(s,a)表示的是在状态 s 下采取动作 a后,遵循最优策略时能获得的最大期望回报。

在最优策略下,价值函数达到最大,因此最优策略对应的值是通过选择能够最大化价值的动作来递推计算的。
Bellman方程在强化学习中的应用
在强化学习中,Bellman方程被广泛应用于值迭代(Value Iteration)和策略迭代(Policy Iteration)等方法,用于求解最优策略和最优值函数。特别是在Q-learning和SARSA等算法中,Bellman方程用于更新Q值。
-
Q-learning:是一种无模型的强化学习算法,使用贝尔曼最优性方程来更新Q值函数。它通过更新 Q(s,a)来逼近最优值。
更新公式为:

其中 α 是学习率。
-
SARSA:是一种基于策略的强化学习算法,通过Bellman方程来更新当前策略下的Q值。
更新公式为:

总结
Bellman方程是动态规划和强化学习中至关重要的工具,提供了一种递归关系来描述状态或状态-动作对的价值。通过Bellman方程,智能体可以计算最优策略或最优值函数,并逐步逼近最优解。它的核心思想是将复杂的多阶段决策问题分解成一个个简单的子问题,利用递归关系求解。
最优性原理是什么。请详细进行解释
最优性原理(Principle of Optimality)是动态规划和强化学习中的核心概念之一。它由Richard Bellman提出,强调在多阶段决策问题中,最优策略的特性:一个问题的最优解包含其子问题的最优解。换句话说,最优解不仅在初始阶段是最优的,而且在后续的每个阶段也是最优的。
最优性原理的基本定义
最优性原理的基本含义是,如果我们在某个时刻采取了最优的决策,并且从该时刻起的剩余决策问题的子问题也是最优的,那么我们得到的整体决策就是最优的。
用更简洁的语言表述:一个问题的最优策略包含了它所有子问题的最优策略。
这种递归的性质允许我们将一个复杂的最优化问题分解为多个子问题,从而简化求解过程。
最优性原理的数学表述
设有一个决策问题,智能体从某一初始状态出发,进行若干阶段的决策以最大化累积奖励。
假设从某一状态 s 开始,智能体采取了最优的策略,并且在每一步都做出了最优的决策。
最优性原理可以通过 Bellman方程 来表达。假设 V∗(s)表示在状态 s下,从当前时刻起执行最优策略所能获得的最大期望回报,那么:
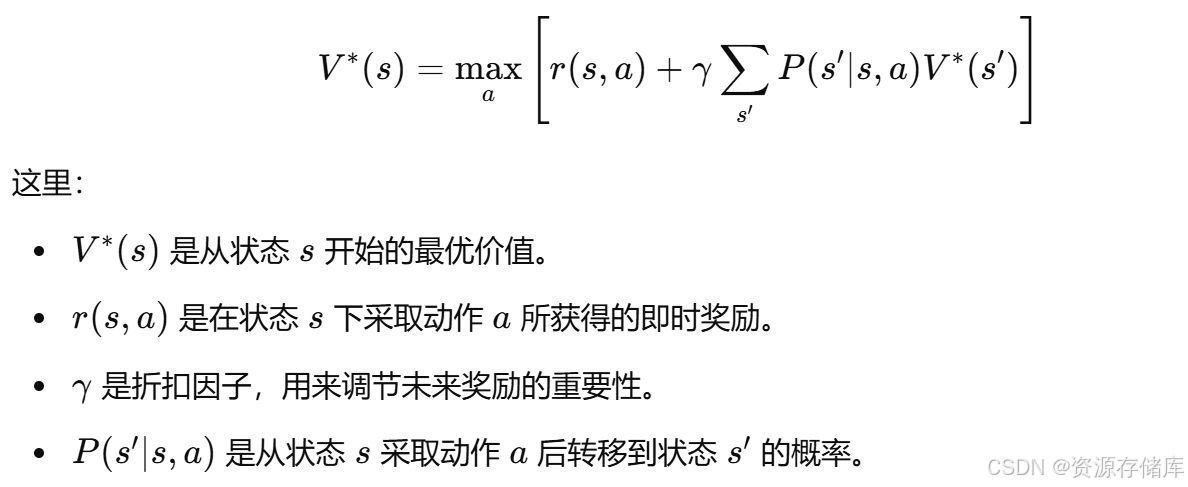
最优性原理在这个方程中体现为:即使我们从状态 s开始,决定当前的最佳动作 a后,未来的决策过程(即从状态 s′开始的最优策略)仍然是最优的。
最优性原理的实际意义
最优性原理的实际意义在于,它允许我们从当前状态向后推导出最优策略,而不需要全局优化。在多阶段决策问题中,如果我们知道如何在每个状态下选择最优动作(即根据最优性原理),就可以构建出整个问题的最优解。
- 分治思想:最优性原理体现了分治思想。在一个大问题中,我们可以将其拆解为若干个子问题,逐一求解每个子问题的最优解,最终合并这些最优解得到整个问题的最优解。
- 递归结构:最优性原理的递归性质使得它成为动态规划和强化学习算法的理论基础。通过递归地计算每个阶段的最优解,我们能够逐步求解整个问题的最优解。
最优性原理的应用:动态规划与强化学习
1. 动态规划中的最优性原理
动态规划方法通过最优性原理分解问题。
在已知环境模型的情况下,动态规划可以递归地计算每个状态的价值,并最终得到最优策略。
-
值迭代(Value Iteration):值迭代算法通过迭代更新状态值函数 V(s),直到收敛。每次更新时,都利用了最优性原理,计算当前状态下的最优价值。
-
策略迭代(Policy Iteration):策略迭代通过迭代地改进策略,每次评估当前策略的价值,并根据最优性原理改进策略,直到收敛。
2. 强化学习中的最优性原理
强化学习算法通常是在无模型的情况下学习最优策略,因此它们通过与环境的交互来逐步逼近最优解。
在强化学习中,最优性原理依然是关键,因为许多算法(如Q-learning、SARSA等)都依赖于Bellman方程来更新价值函数。
Q-learning:Q-learning是一种无模型的强化学习算法,它通过学习每个状态-动作对的Q值(即动作价值),并使用Bellman方程递归地更新Q值,最终收敛到最优Q值。这个过程是通过最优性原理来指导的。
具体更新公式为:
SARSA:SARSA是另一种强化学习算法,它与Q-learning不同,SARSA是基于策略的算法,更新过程不仅依赖当前状态和动作,还依赖于下一个状态和动作。
更新公式为:
同样,最优性原理通过递归地更新Q值,使得最终的策略趋向最优。


最优性原理的实际例子
举一个简单的例子:假设有一个棋盘,智能体从起点出发,需要到达终点,过程中会获得奖励或惩罚。智能体在每一步需要做出决策,选择某个方向移动。通过应用最优性原理,智能体可以通过计算从当前状态到终点的期望回报,逐步推导出最优路径。每一步的决策不仅仅依赖于当前状态,还依赖于后续步骤的最优决策。
最优性原理的优势
- 问题分解:最优性原理使得复杂的决策问题可以分解为多个子问题,从而简化求解过程。
- 递归性质:最优性原理具有递归性质,可以帮助我们通过逐步优化子问题来求解整个问题的最优解。
- 广泛适用:它是动态规划和强化学习中最基本的理论工具,适用于求解各种最优化问题。
总结
最优性原理是动态规划和强化学习中的一个核心概念,它表明:一个问题的最优解包含其子问题的最优解。
通过这一原理,可以将一个复杂的最优化问题分解成多个简单的子问题,从而逐步求解整体的最优解。
在动态规划中,最优性原理通过递归的方式帮助我们计算最优值或最优策略;而在强化学习中,它通过值函数的更新来引导智能体学习最优策略。



















 3935
3935

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











