







软件:博途V15、Matlab2018b
非必须软件:Modbus Poll(模拟Client端)、Modbus Slave(模拟Server端)
编程:梯形图
此通信可分为Server端和Client端。将数据被读写的端理解为Server端,进行操控的端理解为Client端。故这个PLC为Server端,Matlab部分为Client端。
Server端:
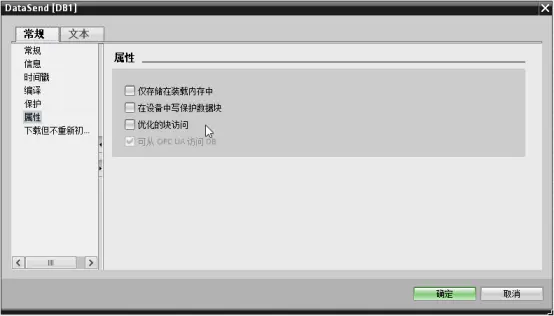
1.创建DataSend数据块,用于matlab对其数据进行读写(data1为Bool类型不能成功写入)。

2.右键单击DataSend数据块,在属性里取消勾选优化块的访问(很重要,不然数据无法使用绝对地址,数据无法通信)
3.创建全局数据块SEND作为TCON_IP_v4传输对象
在块里创建SendObj,数据类型为TCON_IP_v4,该变量是ModBus TCP的通信描述。
变量的含义:
- InterfaceId: PLC的硬件标识符
- ID: 连接编号,取值范围1~4095
- ADDR[1]~[4]: Client端的IP地址(参考适配器设置里PLC的那个网络连接(非PLC自身IP))
- LocalPort: Server的端口,一般Server端才需要设置,Client端可采用默认值(默认用502)

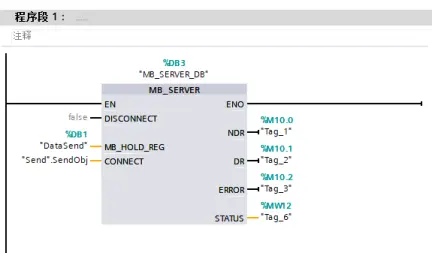
4.编写梯形图
首先需要使用MB_SERVER指令

将其拉到程序段中并配置如下,其中MB_HOLD_RGB接上要读写的数据块(直接拉上去就行),CONNECT则连上通信描述。
然后将程序下载到PLC中。
可以监控变量或者用比较指令编写简单梯形图来看是否通信成功。
Matlab端:
代码:
clear
clc
%创建modbus连接对象
m = modbus('tcpip','192.168.10.1',502); %IP地址为PLC硬件上的地址
%% modbus的读取写法:https://ww2.mathworks.cn/help/instrument/modbus.write.html
% read(m,target,address)
% read(m,target,address,count)
% read(m,target,address,count,serverId,precision)
% count这个参数要和数据个数保持一致,不然可能出错
%% modbus的写入写法:https://ww2.mathworks.cn/help/instrument/modbus.read.html?searchHighlight=read%20modbus&s_tid=srchtitle
% write(m,target,address,values)
% write(m,target,address,values,serverId,'precision')
%% 读写Q端
% data3 = read(m,'coils',1,8)
% write(m,'coils',1,[0,0,0]);
%% 读I端
% data2 = read(m,'inputs',1,8)
%% 读写保持寄存器(数据块)里的内容
%布尔值写不进去
data1 = read(m,'holdingregs',1,3) %第四个参数要和读取的数据个数保持一致,不然可能出错
write(m,'holdingregs',1,[1,1,1]);
clear m
运行此matlab代码即可读取出那3个数据,并且将[1,1,1]对应的写进去,data1为Bool类型故写不进去。
如果通信失败:
PLC下载好程序后如果通信不上首先应尝试重启PLC,然后再次通信。
如果还是不行可用Modbus Poll和Modbus Slave来调试
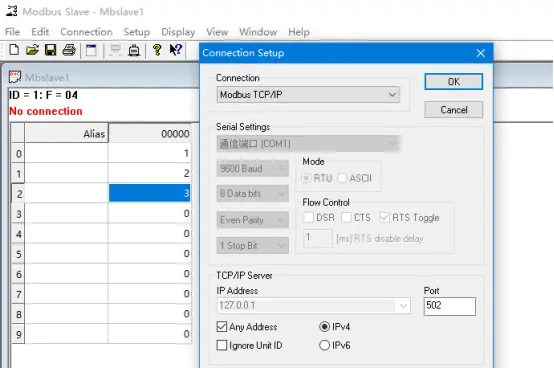
Modbus Slave使用:
在Connection里的Connection Setup可以创建连接,如下配置后点击ok就启动了
在Setup的Slave Definition里可以设置相关参数

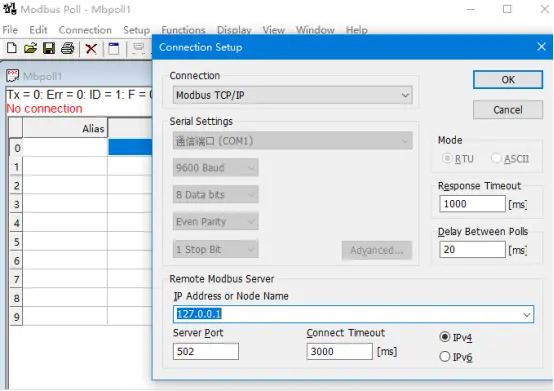
Modbus Poll使用:
由于两个软件都是在本机,故ip写127.0.0.1
在Setup里的Read/Write Definition里设置如下,注意相关参数要和Modbue Slave或者PLC的相对应。
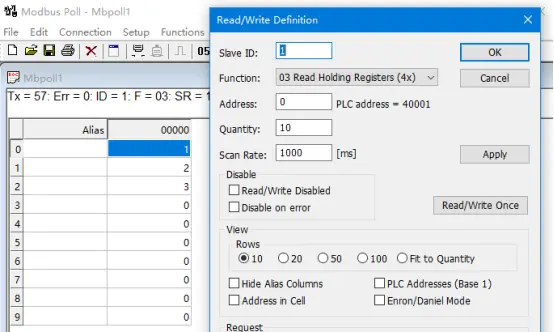
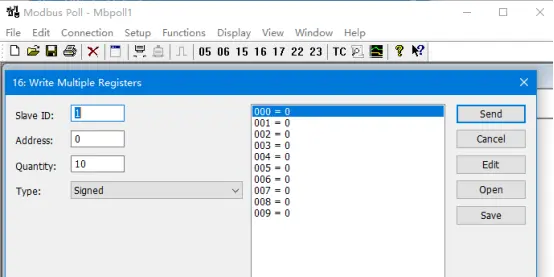
如果要用这个软件修改PLC的数据需要在Functions里成组的修改,在界面单个修改无效。
总结
此为个人备忘笔记

















 1281
1281

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









