







笔者在翻看之前学习Grbl的笔记时,突然发现有些部分由于粗心遗漏没有写出来,但是又是比较重要的内容:架构的补充和Grbl重要源码的学习。于是本文将对框架知识进行补充,下一篇介绍重要的源码后再继续重要算法的介绍
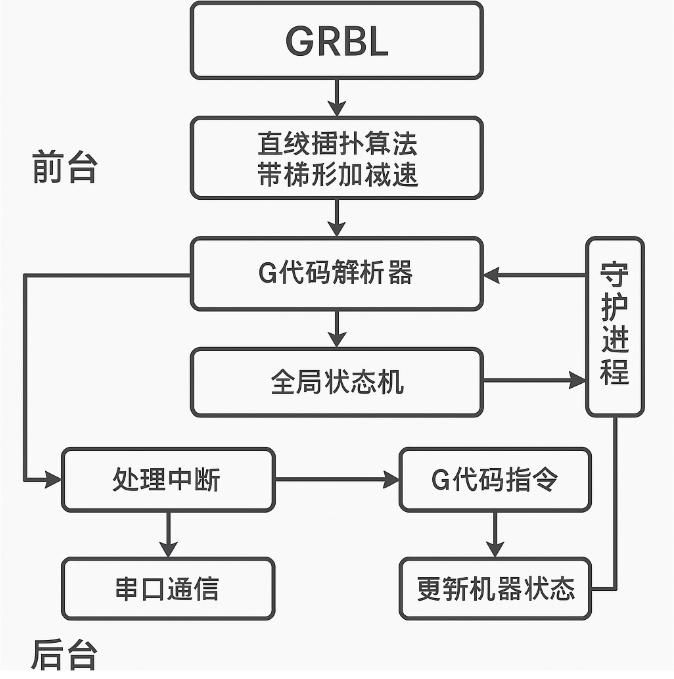
Grbl的核心是带有梯形加减速过程的直线插补算法的实现,它包含一个G代码的解析器,一个全局状态机,还有一系列的守护进程,是一个典型的前台+后台架构(架构图如下)
前台:指的是直接与硬件交互的部分,如处理中断。前台负责快速响应外部事件,如串口通信和硬件中断。
后台:指的是持续运行的循环,它执行不那么紧急的任务,如执行G代码指令、更新机器状态等。后台通常是一个无限循环,它不断地检查和执行任务,直到控制器关闭。
状态机关联前后台: 前台和后台通过状态机相互关联。状态机定义了控制器在任何给定时间应该处于的状态,以及如何根据前台接收的输入(如G代码指令)和后台执行的任务在不同状态之间转换。
用一个形象的比喻来描述此架构就是:GRBL 就像一座智能工厂,前台是快速响应的接待台和急件处理员,负责快速响应外部事件;后台是稳定可靠的生产线,负责稳定执行加工指令;状态机则是调度中心,协调二者运作,实现高效精准的运动控制。
总的来说,Grbl的这种架构设计使其能够高效地处理实时输入和后台任务,同时保持对机器运动的精确控制。这种设计在实时控制系统中非常常见,因为它可以确保系统的响应性和稳定性。
下一篇将详细介绍Grbl的源码分析
以上便是本篇的全部内容啦!
欢迎大家一起交流学习!

















 4432
4432

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









