







这两天在做百度前端技术学院的题目,其中有涉及到寻路相关的,于是就找来相关博客进行阅读。
看了Create Chen写的理解A*寻路算法具体过程之后,我很快就理解A*算法的原理。不得不说作者写的很好,通熟易懂,图片也做的很好,可见作者在这上面是花了心思的。如果让我写,我是写不来这么好的。
唯一的不足就是,因为我学的是js,因此最后给我的源码我是用不了的……因此才有自己写一篇的打算,方面学习js人的学习。然而前面的描述我就借用他的了,因为如果然我的表达能力实在是太渣了。
简易地图
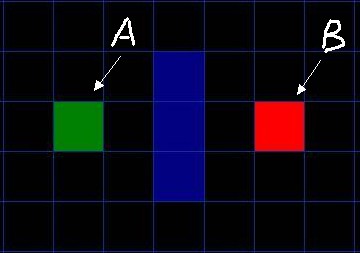
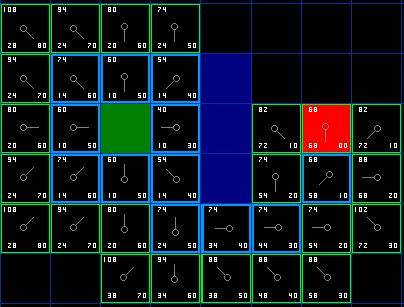
如图所示简易地图, 其中绿色方块的是起点 (用 A 表示), 中间蓝色的是障碍物, 红色的方块 (用 B 表示) 是目的地. 为了可以用一个二维数组来表示地图, 我们将地图划分成一个个的小方块.
二维数组在游戏中的应用是很多的, 比如贪吃蛇和俄罗斯方块基本原理就是移动方块而已. 而大型游戏的地图, 则是将各种"地貌"铺在这样的小方块上.
寻路步骤
1. 从起点A开始, 把它作为待处理的方格存入一个”开启列表”, 开启列表就是一个等待检查方格的列表.
2. 寻找起点A周围可以到达的方格, 将它们放入”开启列表”, 并设置它们的”父方格”为A.
3. 从”开启列表”中删除起点 A, 并将起点 A 加入”关闭列表”, “关闭列表”中存放的都是不需要再次检查的方格

图中浅绿色描边的方块表示已经加入 "开启列表" 等待检查. 淡蓝色描边的起点 A 表示已经放入 "关闭列表" , 它不需要再执行检查.
从 "开启列表" 中找出相对最靠谱的方块, 什么是最靠谱? 它们通过公式 F=G+H 来计算.
F = G + H
G 表示从起点 A 移动到网格上指定方格的移动耗费 (可沿斜方向移动).
H 表示从指定的方格移动到终点 B 的预计耗费 (H 有很多计算方法, 这里我们设定只可以上下左右移动).
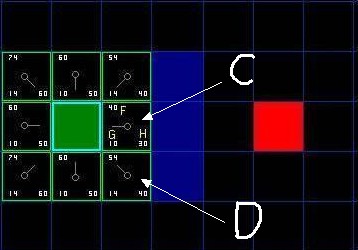
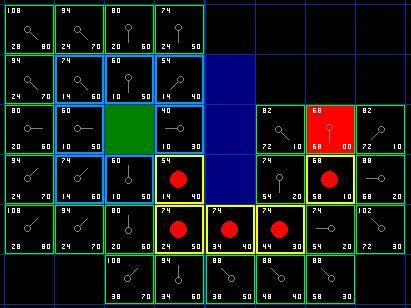
我们假设横向移动一个格子的耗费为10, 为了便于计算, 沿斜方向移动一个格子耗费是14. 为了更直观的展示如何运算 FGH, 图中方块的左上角数字表示 F, 左下角表示 G, 右下角表示 H. 看看是否跟你心里想的结果一样?
从 "开启列表" 中选择 F 值最低的方格 C (绿色起始方块 A 右边的方块), 然后对它进行如下处理:
4. 把它从 "开启列表" 中删除, 并放到 "关闭列表" 中.
5. 检查它所有相邻并且可以到达 (障碍物和 "关闭列表" 的方格都不考虑) 的方格. 如果这些方格还不在 "开启列表" 里的话, 将它们加入 "开启列表", 计算这些方格的 G, H 和 F 值各是多少, 并设置它们的 "父方格" 为 C.
6. 如果某个相邻方格 D 已经在 "开启列表" 里了, 检查如果用新的路径 (就是经过C 的路径) 到达它的话, G值是否会更低一些, 如果新的G值更低, 那就把它的 "父方格" 改为目前选中的方格 C, 然后重新计算它的 F 值和 G 值 (H 值不需要重新计算, 因为对于每个方块, H 值是不变的). 如果新的 G 值比较高, 就说明经过 C 再到达 D 不是一个明智的选择, 因为它需要更远的路, 这时我们什么也不做.
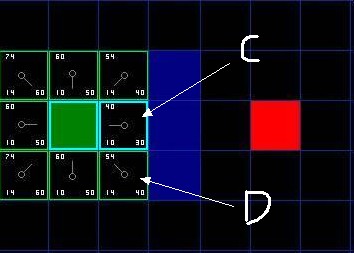
如图, 我们选中了 C 因为它的 F 值最小, 我们把它从 "开启列表" 中删除, 并把它加入 "关闭列表". 它右边上下三个都是墙, 所以不考虑它们. 它左边是起始方块, 已经加入到 "关闭列表" 了, 也不考虑. 所以它周围的候选方块就只剩下 4 个. 让我们来看看 C 下面的那个格子, 它目前的 G 是14, 如果通过 C 到达它的话, G将会是 10 + 10, 这比 14 要大, 因此我们什么也不做.
然后我们继续从 "开启列表" 中找出 F 值最小的, 但我们发现 C 上面的和下面的同时为 54, 这时怎么办呢? 这时随便取哪一个都行, 比如我们选择了 C 下面的那个方块 D.
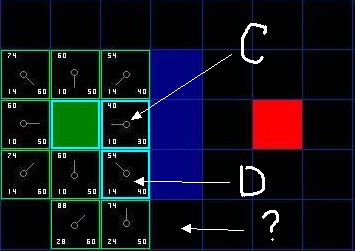
D 右边已经右上方的都是墙, 所以不考虑, 但为什么右下角的没有被加进 "开启列表" 呢? 因为如果 C 下面的那块也不可以走, 想要到达 C 右下角的方块就需要从 "方块的角" 走了, 在程序中设置是否允许这样走. (图中的示例不允许这样走)
就这样, 我们从 "开启列表" 找出 F 值最小的, 将它从 "开启列表" 中移掉, 添加到 "关闭列表". 再继续找出它周围可以到达的方块, 如此循环下去...
那么什么时候停止呢? —— 当我们发现 "开始列表" 里出现了目标终点方块的时候, 说明路径已经被找到.
如何找回路径
如上图所示, 除了起始方块, 每一个曾经或者现在还在 “开启列表” 里的方块, 它都有一个 “父方块”, 通过 “父方块” 可以索引到最初的 “起始方块”, 这就是路径.
将整个过程抽象
把起始格添加到 “开启列表”
do
{
寻找开启列表中F值最低的格子, 我们称它为当前格.
把它切换到关闭列表.
对当前格相邻的8格中的每一个
if (它不可通过 || 已经在 “关闭列表” 中)
{
什么也不做.
}
if (它不在开启列表中)
{
把它添加进 “开启列表”, 把当前格作为这一格的父节点, 计算这一格的 FGH
if (它已经在开启列表中)
{
if (用G值为参考检查新的路径是否更好, 更低的G值意味着更好的路径)
{
把这一格的父节点改成当前格, 并且重新计算这一格的 GF 值.
}
} while( 目标格已经在 “开启列表”, 这时候路径被找到)
如果开启列表已经空了, 说明路径不存在.
最后从目标格开始, 沿着每一格的父节点移动直到回到起始格, 这就是路径.
//其中的MAP.arr是二维数组
searchRoad:function (MAP,start_x,start_y,end_x,end_y){
var openList=[], //开启列表
closeList=[], //关闭列表
result=[], //结果数组
result_index; //结果数组在开启列表中的序号
//用F值对数组排序
function sortF(a,b){
return b.F- a.F;
}
//获取周围八个点的值
function SurroundPoint(curPoint){
var x=curPoint.x,y=curPoint.y;
return [
{x:x-1,y:y-1},
{x:x,y:y-1},
{x:x+1,y:y-1},
{x:x+1,y:y},
{x:x+1,y:y+1},
{x:x,y:y+1},
{x:x-1,y:y+1},
{x:x-1,y:y}
]
}
//判断点是否存在在列表中,是的话返回的是序列号
function existList(point,list) {
for(var i in list) {
if(point.x==list[i].x && point.y==list[i].y) {
return i;
}
}
return false;
}
openList.push({x:start_x,y:start_y,G:0});//把当前点加入到开启列表中,并且G是0
do{
var currentPoint = openList.pop();
closeList.push(currentPoint);
var surroundPoint=SurroundPoint(currentPoint);
for(var i in surroundPoint) {
var item = surroundPoint[i]; //获得周围的八个点
if (
item.x>=0 && //判断是否在地图上
item.y>=0 &&
item.x<MAP.rows &&
item.y<MAP.cols &&
MAP.arr[item.x][item.y] != 1 && //判断是否是障碍物
!existList(item, closeList) && //判断是否在关闭列表中
MAP.arr[item.x][currentPoint.y]!=1 && //判断之间是否有障碍物,如果有障碍物是过不去的
MAP.arr[currentPoint.x][item.y]!=1) {
//g 到父节点的位置
//如果是上下左右位置的则g等于10,斜对角的就是14
var g = currentPoint.G + ((currentPoint.x - item.x) * (currentPoint.y - item.y) == 0 ? 10 : 14);
if (!existList(item, openList)) { //如果不在开启列表中
//计算H,通过水平和垂直距离进行确定
item['H'] = Math.abs(end_x - item.x) * 10 + Math.abs(end_y - item.y) * 10;
item['G'] = g;
item['F'] = item.H + item.G;
item['parent'] = currentPoint;
openList.push(item);
}
else { //存在在开启列表中,比较目前的g值和之前的g的大小
var index = existList(item, openList);
//如果当前点的g更小
if (g < openList[index].G) {
openList[index].parent = currentPoint;
openList[index].G = g;
openList[index].F=g+openList[index].H;
}
}
}
}
//如果开启列表空了,没有通路,结果为空
if(openList.length==0) {
break;
}
openList.sort(sortF);//这一步是为了循环回去的时候,找出 F 值最小的, 将它从 "开启列表" 中移掉
}while(!(result_index=existList({x:end_x,y:end_y},openList)));
//判断结果列表是否为空
if(!result_index) {
result=[];
}
else {
var currentObj=openList[result_index];
do{
//把路劲节点添加到result当中
result.unshift({
x:currentObj.x,
y:currentObj.y
});
currentObj=currentObj.parent;
}while (currentObj.x!=start_x || currentObj.y!=start_y);
}
return result;
}














 1090
1090

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









