






stm32全桥逆变电路
采用2个ir2110驱动半桥
mos采用irf540n
最大输入直流50v
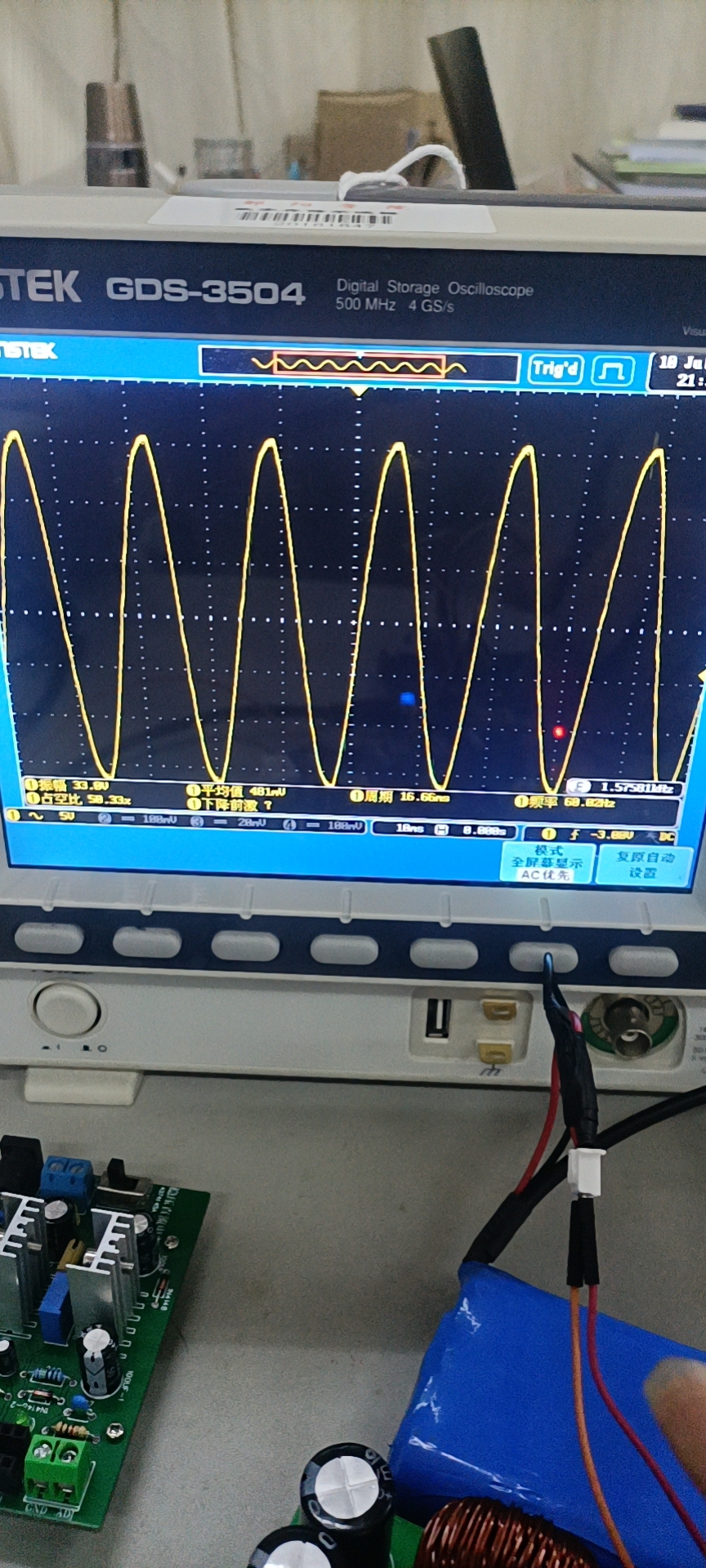
输出交流利用率高
谐波0.6%
立创原理图
有stm32系列
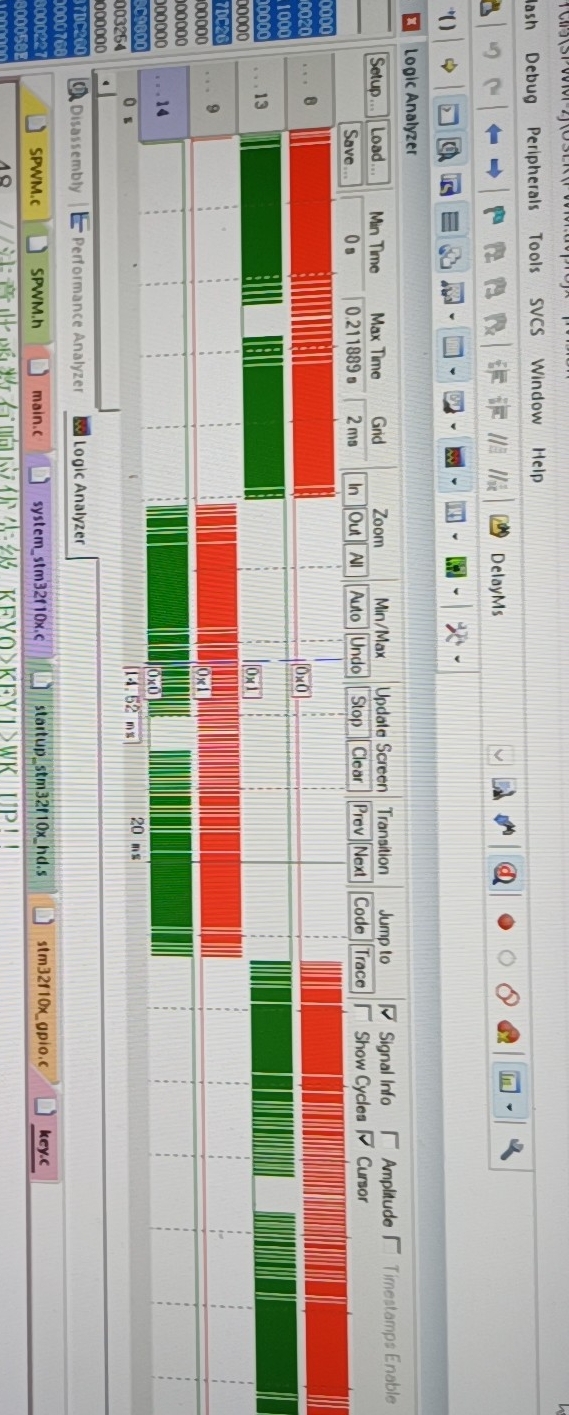
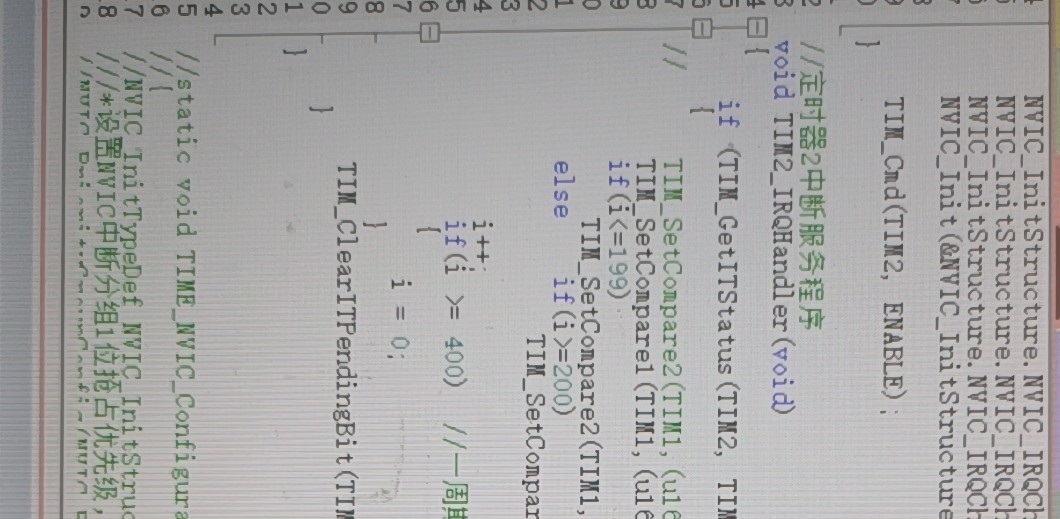
想学习spwm波形的原理以及相关代码这个是个不错的选择,网上现成代码少,整理不易
ID:8135679008525667
一口价6折
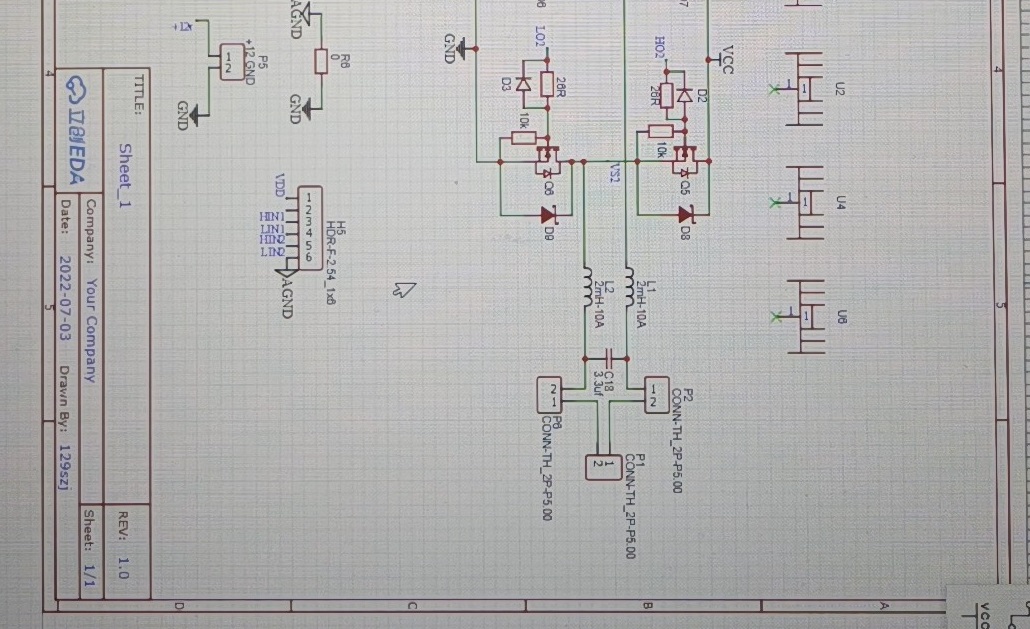
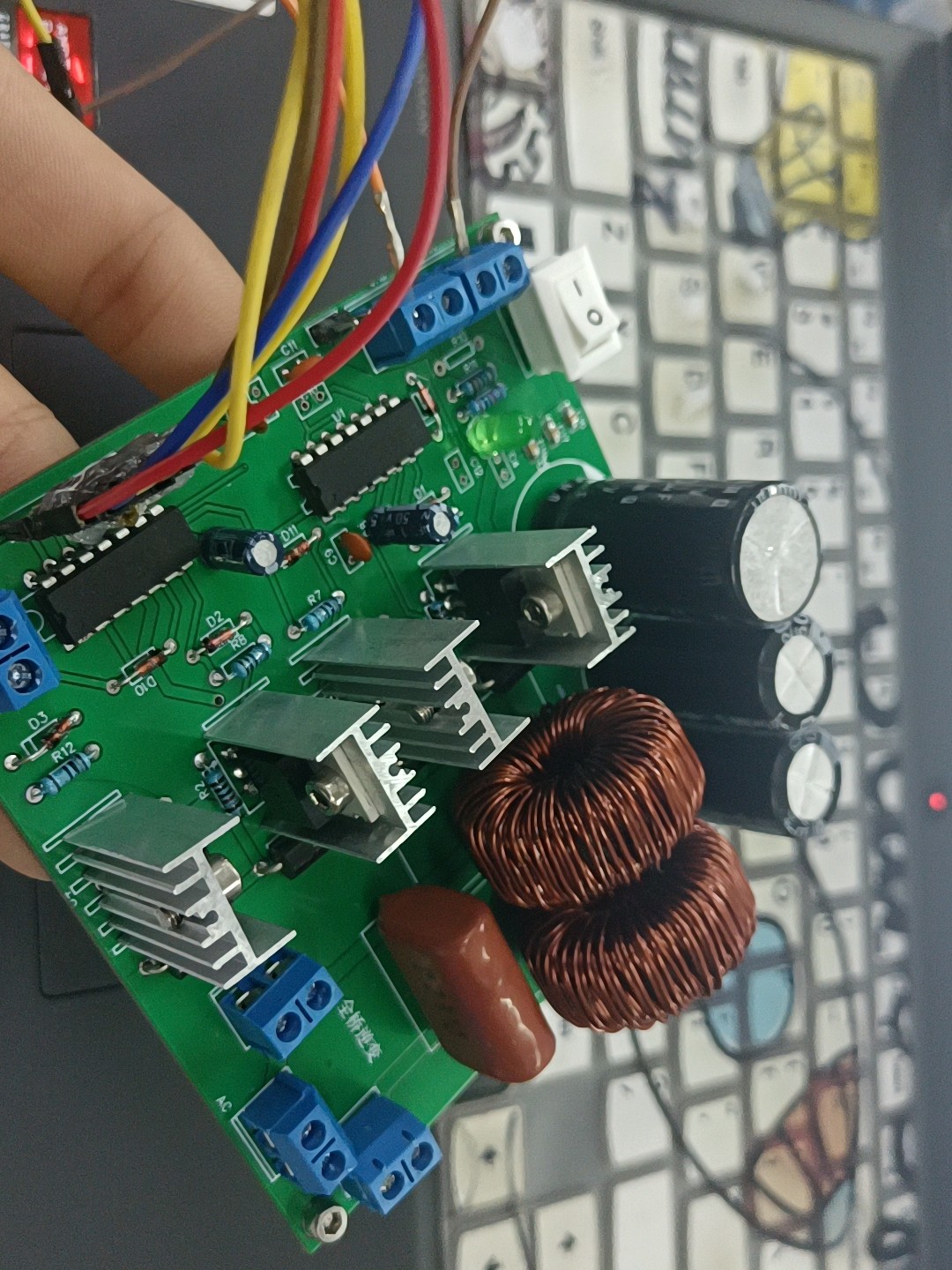
stm32全桥逆变电路,是指采用STM32系列微控制器搭建的全桥逆变电路。其中,采用了2个IR2110作为驱动半桥,采用IRF540N作为MOS管,最大输入直流电压为50V,输出交流电压具有高利用率,谐波仅为0.6%。该设计基于立创原理图,既可用于学习STM32系列微控制器的驱动设计,又可用于学习SPWM波形的原理以及相关代码。
首先,全桥逆变电路是一种常用的电力电子装置,主要用于将直流电源转换成交流电源。其基本原理是利用交流电压的方向变化来控制输出功率。在这个设计中,采用了2个IR2110作为驱动半桥。IR2110是一款高速、低成本的MOSFET和IGBT驱动器,它能以较低的功耗提供高电流和高峰值电流。
而作为MOS管,IRF540N具有较低的导通电阻和开关速度,能够提供较大的输出功率。最大输入直流电压为50V,这意味着输入电源的电压范围应在可接受的范围内,以确保系统的稳定性和安全性。
在输出的交流电压利用率方面,这个设计达到了较高的效果。交流电压利用率是指输出交流电压与输入直流电压之比,它反映了电能的转换效率。该设计经过精心调整和优化,使得输出电压能够更好地利用输入电源。
此外,全桥逆变电路的谐波水平也得到了有效控制。谐波是指在交流电的频谱中除了基波之外的其他频率成分。较低的谐波水平意味着输出电压更接近理想的正弦波形,减少了电力电子装置对其他设备的干扰。
在设计过程中,立创原理图为我们提供了便利。立创原理图是一款功能强大的电子设计自动化工具,能够帮助我们完成电路原理图的设计和仿真。通过立创原理图,我们可以更加方便地完成这个全桥逆变电路的搭建和调试。
最后,这个设计采用了STM32系列微控制器,使得系统具备更高的智能化和可编程性。STM32系列微控制器是一款功能丰富、性能强大的微控制器,具有高速运算能力和丰富的外设接口,适用于各种工业控制和电力电子应用。而学习SPWM波形的原理以及相关代码,对于电力电子领域的学习和研究具有重要意义。然而,网上现成的SPWM波形代码比较少,整理起来也并不容易。因此,这个设计不仅可以满足学习STM32系列微控制器的需求,还可以用于学习SPWM波形的原理和相关代码。
综上所述,这个基于STM32系列微控制器的全桥逆变电路设计具有较高的技术水平和实用价值。通过对IR2110、IRF540N等器件的合理选择和调试,以及对电路原理图的合理设计,可以实现较高的输出交流电压利用率和较低的谐波水平。通过学习这个设计,不仅可以提高对全桥逆变电路的理解,还可以深入了解SPWM波形的原理和相关代码,为电力电子领域的学习和研究提供了有益的参考。
相关的代码,程序地址如下:http://matup.cn/679008525667.html
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









