







目录
1 什么是哈希表
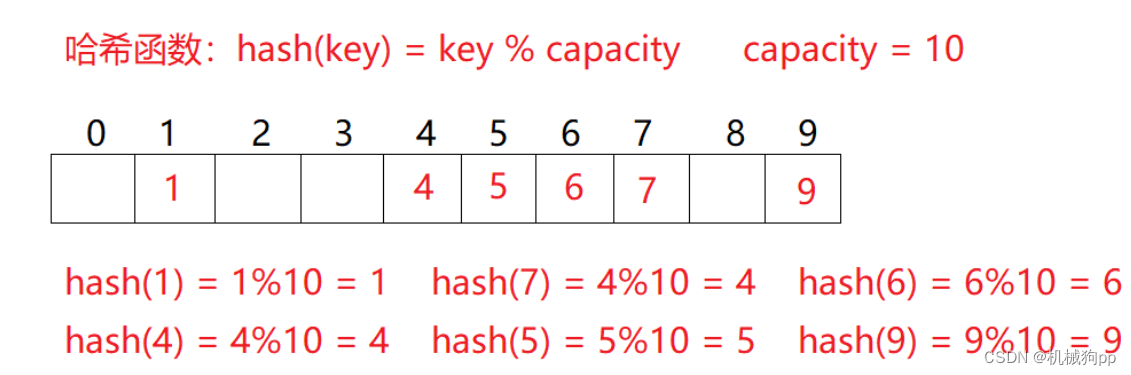
哈希表的数据结构是一个顺序表,在存储内容时通过数组下标与数据值一一映射的方式记录。这里的一一映射关系可以用函数来表示,这样的函数叫做哈希转换函数。
2 哈希冲突
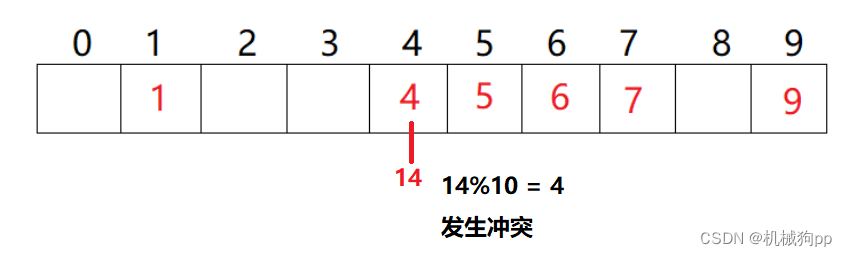
从上可以看出由于可能出现多个值映射到顺序表的同一个位置,这样就导致该数组存储数据位置发生冲突,这样的情况称为哈希冲突。
2.1 冲突解决
2.1.1 重新设计哈希函数
哈希函数包括:直接定制法、 除留余数法等多种方法,其实都是根据需要对映射关系作规定,设计一个好的哈希函数可减少哈希冲突。
2.1.2 闭散列(开放地址法)
当发生哈希冲突时,如果哈希表未被装满,说明在哈希表中必然还有空位置,那
么可以把key存放到冲突位置中的“下一个” 空位置中去。
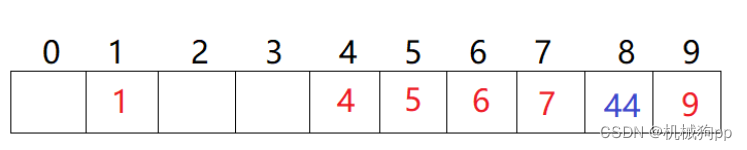
线性探测:从发生冲突的位置开始,依次向后探测,直到寻找到下一个空位置为止。
如下图由于新插入44,按除留余数法映射位置在下标4位置,由于4位置已有数据,就逐个向后探测,一直到下标8位置有了空位就插入数组。
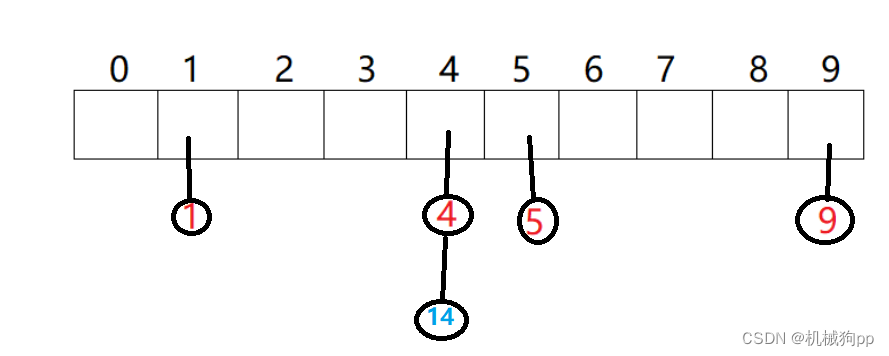
二次探测:从发生冲突的位置开始,按二次函数的序列增加(i*i,i=1,2,3,4....)向后探测,直到寻找到下一个空位置为止。
举个例子如下,14映射下标位置为4,同样也有位置冲突。第一次i=1,增加i*i=1个位置,即下标5的位置,再次发生冲突,继续向后探测。这时i=2,i*i=4,向后4个位置在下标8的位置,该位置没有数据则插入成功。

2.1.3 开散列(拉链法)
对关键码集合用散列函数计算散列地址,具有相同地址的关键码归于同一子集合,每一个子集合称为一个桶,各个桶中的元素通过一个单链表链接起来,各链表的头结点存储在哈希表中。
2.2 哈希表扩容
散列表的载荷因子定义为: a = 填入表中的元素个数 / 散列表的长度
a是散列表装满程度的标志因子。由于表长是定值,a与“填入表中的元素个数”成正比,所以,a越大,表明填入表中的元素越多,产生冲突的可能性就越大;反之,a越小,标明填入表中的元素越少,产生冲突的可能性就越小。实际上,散列表的平均查找长度是载荷因子a的函数,只是不同处理冲突的方法有不同的函数。
对于开放定址法,荷载因子是特别重要因素,应严格限制在0.7-0. 8以下。超过0. 8,查表时的CPU缓存不命中(cachemissing)按照指数曲线上升。在载荷因子过高时应对哈希表扩容。
对于拉链法,最好的情况是:每个哈希桶中刚好挂一个节点,再继续插入元素时,每一次都会发生哈希冲突,因此,在元素个数刚好等于桶的个数时,可以给哈希表增容。
3 代码实现
3.1闭散列
该哈希表的实现,哈希函数使用除留余数法,探测方法为一次探测。载荷因子阈值为0.7,使用vector作为数据结构,初始容量设置为10。
字符串类型由于不是一个整数无法使用除留余数法映射到数组上,于是使用Hashfunc仿函数处理。在哈希表中的数组每个位置设置三个状态(空、已删除、满)方便后面的插入删除等实现。私有成员变量不是指哈希表的大小,而是表中的有效数据个数,哈希表的大小使用_ht.size()来取到。
#pragma once
#include <vector>
#include <string>
namespace Close_Hash
{
template<class K>
struct Hash
{
size_t operator()(const K& key)
{
return key;
}
};
template<>
struct Hash<std::string>
{
size_t operator()(const std::string& s)
{
size_t res = 0;
for (auto c : s)
{
res *= 31;
res += c;
}
return res;
}
};
enum State { EMPTY, EXIST, DELETE };
template<class K, class V,class HashFunc = Hash<K>>
class HashTable
{
struct Elem
{
std::pair<K, V> _val;
State _state = EMPTY;
};
public:
// 插入
bool Insert(const std::pair<K, V>& val);
// 查找
std::pair<size_t, bool> Find(const K& key);
// 删除
bool Erase(const K& key);
size_t Size()const
{
return _size;
}
bool Empty() const
{
return _size == 0;
}
private:
std::vector<Elem> _ht;
size_t _size;
};
}3.1.1 查找
计算出映射值,依照数组存储值和状态值按照探测方式向后查找,while循环中的条件不能是_ht[index]._state == EXIT,这样就会在状态是DELETE数据时就跳出循环,然而其实还是要向后寻找的。
std::pair<size_t, bool> Find(const K& key)
{
if (_ht.empty())
return std::make_pair(0,false);
Hash<K> hs;
size_t start = hs(key) % _ht.size();
size_t i = 0;
size_t index = start;
while (_ht[index]._state != EMPTY)
{
if (_ht[index]._val.first == key
&& _ht[index]._state == EXIST)
return std::make_pair(index, true);
i++;
index = start + i;
index %= _ht.size();
}
return std::make_pair(0, false);
}3.1.2 插入
插入中有一个扩容的问题,扩容以后的映射关系发生改变。通过创建临时的哈希表,然后递归调用插入函数,最后将临时的哈希表与当前表交换即可完成哈希表的重新映射。在插入上找到正确的位置插入,同时更新表中有效个数_size即可。
bool Insert(const std::pair<K, V>& val)
{
if (Find(val.first).second)
{
return false;
}
if (_ht.size() == 0 || _size * 10 / _ht.size() > 7)
{
//扩容
int newsize = _ht.size() == 0 ? 10 : _ht.size() * 2;
HashTable<K, V> newTable;
newTable._ht.resize(newsize);
//重新装入
for (int i = 0; i < _ht.size(); i++)
{
if(_ht[i]._state == EXIST)
newTable.Insert(_ht[i]._val);
}
_ht.swap(newTable._ht);
}
Hash<K> hs;
size_t start = hs(val.first) % _ht.size();
size_t i = 0;
size_t index = start;
while (_ht[index]._state == EXIST)
{
i++;
index = start + i;
index %= _ht.size();
}
//找到空位置了
_ht[index]._val = val;
_ht[index]._state = EXIST;
++_size;
return true;
}3.1.3 删除
删除就简单了,找到位置将该位置状态置为已删除即可,另外不要忘记更新_size。
bool Erase(const K& key)
{
std::pair<size_t,bool> FindOut = Find(key);
if (FindOut.second == false)
{
return false;
}
_ht[FindOut.first]._state = DELETE;
--_size;
return true;
}3.2 开散列
开散列中就基本上都是链表的操作了。
#pragma once
#include <vector>
#include <string>
namespace Open_Hash
{
template<class K>
struct Hash
{
size_t operator()(const K& key)
{
return key;
}
};
template<>
struct Hash<std::string>
{
size_t operator()(const std::string& s)
{
size_t res = 0;
for (auto c : s)
{
res *= 31;
res += c;
}
return res;
}
};
template<class K, class V, class HashFunc = Hash<K>>
class HashTable
{
struct Node
{
Node(std::pair<K, V> kv)
:_kv(kv)
,next(nullptr)
{}
std::pair<K, V> _kv;
Node* next;
};
public:
// 插入
bool Insert(const std::pair<K, V>& kv);
// 查找
Node* Find(const K& key);
// 删除
bool Erase(const K& key);
size_t Size()const
{
return _size;
}
bool Empty() const
{
return _size == 0;
}
private:
std::vector<Node*> _ht;
size_t _size = 0;//有效数据的个数
};
}3.2.1 查找
计算映射下标,再从链表头开始查找数据。
Node* Find(const K& key)
{
if (_ht.empty())
return nullptr;
Hash<K> hs;
size_t index = hs(key) % _ht.size();
Node* cur = _ht[index];
while (cur)
{
if (cur->_kv.first == key)
return cur;
cur = cur->next;
}
return nullptr;
}3.2.2 插入
由于一个哈希桶中的数据没有顺序要求,使用头插效率高一些。在扩容上使用临时数组,把当前数组上挂的节点一个个头插到临时数组上 ,最后两个数组交换得到需要的数组。
bool Insert(const std::pair<K, V>& kv)
{
if (Find(kv.first))
{
return false;
}
if (_ht.size() == _size)//负载因子到1
{
//扩容
int newsize = _ht.size() == 0 ? 10 : _ht.size() * 2;
std::vector<Node*> newTable;
newTable.resize(newsize);
//重新装入
for (int i = 0; i < _ht.size(); i++)
{
Node* cur = _ht[i];
while (cur)
{
Node* next = cur->next;
Hash<K> hs;
size_t index = hs(_ht[i]->_kv.first) % newTable.size();
cur->next = newTable[index];
newTable[index] = cur;
cur = next;
}
_ht[i] = nullptr;
}
_ht.swap(newTable);
}
Hash<K> hs;
size_t index = hs(kv.first) % _ht.size();
Node* newNode = new Node(kv);
newNode->next = _ht[index];
_ht[index] = newNode;
++_size;
return true;
}3.2.3 删除
找到数据节点直接删除即可,链表操作。
bool Erase(const K& key)
{
if (_ht.empty())
return false;
Hash<K> hs;
size_t index = hs(key) % _ht.size();
Node* cur = _ht[index];
Node* pre = nullptr;
while (cur)
{
if (cur->_kv.first == key)
{
if (pre == nullptr)//头删
_ht[index] = cur->next;
else
pre->next = cur->next;
delete cur;
--_size;
return true;
}
pre = cur;
cur = cur->next;
}
return false;
}














 386
386











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









